Download - C:\Fakepath\Mq Datasheet D3de
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 1/39
EIGENSCHAFTEN
♦ Latenzfreie Sinus-Digital-Wandlung bis 400 Winkelschritte
♦ 200 kHz Eingangsfrequenz für Interpolationsfaktoren von x1
bis x5 (10 kHz für x100)
♦ Flexible Pin-Konfiguration durch Signalpfad-Multiplexer
♦ PGA-Eingänge für differentielle und referenzbezogene Signale
♦ Variabler Eingangswiderstand zur Strom-/Spannungswandlung
♦ Signalkonditionierung für Offset, Amplitude und Phase
♦ Geregelte 50 mA-Stromquelle zur LED/MR-Sensorversorgung
♦ Fehlertolerante RS422-Leitungstreiber bis 50 mA
♦ Störungsfreie Zähleransteuerung durch Quadratursignale mit
vorwählbarem Mindestflankenabstand
♦ Nullimpulsverarbeitung mit programm. Position und Länge
♦ Signal- und Betriebsüberwachung mit einstellbarer
Alarmausgabe, Ausgangsabschaltung und Fehlerspeicherung
♦ I2C-Multi-Master-Schnittstelle für In-Circuit Kalibrierung und
Parameter (EEPROM)
♦ Überwachte Versorgungsspannung mit integriertem Schalter
für verpolungstolerante Systeme
♦ Übertemperaturschutz mit einstellbarem Sensor
♦ Versorgung 4.3 bis 5.5 V, Betrieb von -25(-40) bis 100 °C
ANWENDUNGEN
♦ Optische und magnetische
Positionsmessgeräte
♦ Winkelkodierer
♦ Lineare Wegmesssysteme
GEHÄUSE
TSSOP20
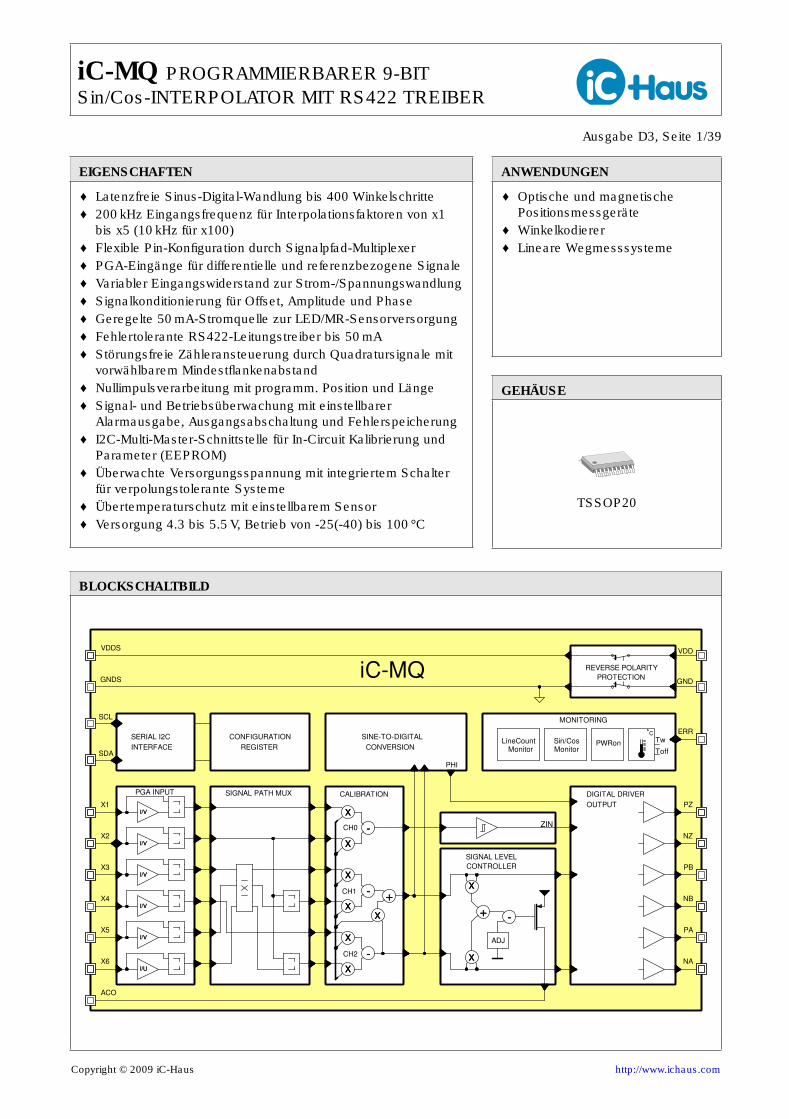
BLOCKSCHALTBILD
I/V
x
x
PGA INPUT
x
SIGNAL PATH MUX
-
x
Monitor
I/V
-I/V
I/V
REVERSE POLARITY
I/V
I/U
I/V
I/V
xx+
ADJ
x
SERIAL I2C
CONTROLLER
NB
X1
X2
GND
PB
REGISTER
I/U
INTERFACE
NZ
PZ
I/V
CH0
CH1
xX4
NA
PHI
Toff
SCL
PROTECTION
Tw
ACO
SDA
VDD
iC-MQVDDS
MONITORING
CONFIGURATIONCONVERSION
OUTPUT
PA-
CH2
GNDS
X6
X5
LineCount
SIGNAL LEVEL
xI/V
ZIN
-
x
Monitor
x
I/V
xx
Sin/Cos
+
x
x
+
-
-
-
PWRon
CALIBRATION
ERR
DIGITAL DRIVER
SINE-TO-DIGITAL
X3
x
-
x
x
+
C
Copyright © 2009 iC-Haus http://www.ichaus.com

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 2/39
KURZBESCHREIBUNG
Der Interpolator iC-MQ ist ein nichtlinearer A/D-
Wandler, der Sinus-/Cosinus-Sensorsignale über ein
verzählsicheres Nachlaufverfahren mit wählbarer
Auflösung und Hysterese digitalisiert. Die Winkelauf-
lösung pro Sinus-Periode ist mit SELRES einstellbar;
bis zu 400 Winkelschritte sind möglich (siehe S. 26).
Die inkrementale Ausgabe des Winkelwerts er-
folgt über differentielle RS422-Treiber als Encoder-
Quadratur-Signal mit Nullimpuls, oder wahlweise als
Zählersignal für 74HC191 oder 74HC193 kompatible
Bausteine.
Der Nullimpuls wird elektronisch generiert, wenn die
Freigabe über die X1/X2-Eingänge erteilt ist, und ist
weitestgehend konfigurierbar: In der relativen Lage
zum Eingangssignal, bezüglich der logischen Ver-
knüpfung mit A bzw. B, sowie in der Breite von 90
bis 360 Grad (1/4 bis 1 T).
Ein vorwählbarer minimaler Flankenabstand sorgt für
Glitch-freie Ausgangssignale und verhindert Zählfeh-
ler, was die Störfestigkeit der Positionserfassung er-
höht.
Programmierbare Instrumentenverstärker mit wähl-
barer Verstärkung erlauben differentielle oder refe-
renzbezogene Eingangssignale; über den Eingang
X2 kann eine externe Referenz zur Bezugsquelle für
die Offset-Korrektur werden.
Die Betriebsarten unterscheiden hochohmige Im-
pedanz (V-Modi) oder niederohmige Impedanz (I-
Modi). Durch diese Anpassung an Spannungs- oder
Stromsignale ist der direkte Anschluss von MR-
Sensorbrücken oder Photosensoren möglich. Durch
die Referenzfunktion am Eingang X2 werden eben-
falls optische Abtastungen niedrig auflösender Co-
descheiben unterstützt, die Spuren nicht differentiell
sondern gegen eine Referenzfotodiode bewerten.
Die integrierte Signalkonditionierung erlaubt den Ab-
gleich der Signalamplituden und Offsetspannungen,
sowie die Korrektur eines Phasenfehlers zwischen
dem Sinus- und Cosinus-Signal. Der Kanal für das
Nullsignal ist separat einstellbar.
Aus den konditionierten Signalen wird ein Regel-
signal gewonnen, das über die integrierte 50 mA-
Treiberstufe die Sende-LED optischer Systeme an-
steuern kann (Ausgang ACO). Für magnetische Sen-
soren übernimmt diese Treiberstufe die Versorgung
der MR-Messbrücken. Durch die Nachführung der
Sensorversorgung werden Temperatur- und Alte-
rungseffekte des Sensors ausgeglichen, die Ein-
gangssignale stabilisiert und die exakte Kalibrierung
der Eingangssignale aufrecht erhalten - dadurch ist
eine gleichbleibende Genauigkeit der Interpolation
im gesamten Betriebstemperaturbereich möglich.
Werden Regelungsgrenzen erreicht, kann dies am
maskierbaren Fehlerpin ERR angezeigt werden. Er-
fasst werden Störungen zum Beispiel durch Über-
steuerung, Drahtbruch, Kurzschluss, Verschmutzung
und Alterung.
iC-MQ enthält umfangreiche Selbsttest- und
Systemdiagnose-Funktionen, zur Überwachung ei-
nes fehlerfreien Sensorbetriebs. Für alle Fehlerer-
eignisse ist separat wählbar, ob eine Meldung durch
die Anzeige am Fehlerpin ERR oder die Abschal-
tung der Ausgänge erfolgen soll. Gleichzeitig ist die
Speicherung von Fehlern im EEPROM möglich, um
eine spätere Ausfalldiagnose zu ermöglichen. Für
Drehgeber-Applikationen kann beispielsweise die
Strichzahl der Codescheibe, das Sensorsignal be-
züglich Signalstärke und Frequenz, sowie per ein-
stellbarem On-Chip-Sensor die Betriebstemperatur
überwacht werden.
Der anzeigende Fehlerpin ERR ist bidirektional,
ein extern erkannter Systemfehler kann erfasst und
ebenfalls im Fehlerspeicher registriert werden.
Der Baustein iC-MQ ist verpolungsfest und stellt ei-
ne überwachte Spannungsversorgung zum Aufbau
eines verpolungsfesten Systems zur Verfügung (für
Lastströme bis 20 mA). Der Verpolungsschutz be-
steht ebenfalls für die kurzschlussfesten Leitungs-
treiber, sodass eine versehentliche Anschlussvertau-
schung bei der Inbetriebnahme toleriert wird.
Die Bausteinkonfiguration wird nach dem Einschal-
ten über die serielle Konfigurations-Schnittstelle aus
einem externen EEPROM geladen und per CRC-
Prüfung verifiziert. Ein Mikrocontroller kann die Kon-
figuration ebenfalls vornehmen, die implementierte
Schnittstelle ist multi-master-fähig und erlaubt einen
direkten RAM-Zugriff.

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 3/39
INHALT
GEHÄUSE 4
GRENZWERTE 5
THERMISCHE DATEN 5
KENNDATEN 6
PROGRAMMIERUNG 11
REGISTERBELEGUNG 12
SERIELLE
KONFIGURATIONS-SCHNITTSTELLE 14
Beispiel der CRC Berechnungsroutine . . . . 14
EEPROM-Auswahl . . . . . . . . . . . . . . . 14
I2C-Slave-Modus (ENSL = 1) . . . . . . . . . 15
BIAS-STROMQUELLE UND
TEMPERATURSENSOR-KALIBRIERUNG 16
Bias-Strom . . . . . . . . . . . . . . . . . . . 16
Temperatursensor . . . . . . . . . . . . . . . 16
BETRIEBSARTEN 17
Mode ABZ . . . . . . . . . . . . . . . . . . . 17
Mode 191/193 . . . . . . . . . . . . . . . . . 17
Calibration 1, 2, 3 . . . . . . . . . . . . . . . 17
TEST 6 . . . . . . . . . . . . . . . . . . . . . 18
Systemtest . . . . . . . . . . . . . . . . . . . 18
EINGANGSKONFIGURATION 19
Stromsignale . . . . . . . . . . . . . . . . . . 19
Spannungssignale . . . . . . . . . . . . . . . 19
SIGNALPFAD-MULTIPLEXER 20
SIGNALKONDITIONIERUNG CH1, CH2 21
Verstärkungseinstellung . . . . . . . . . . . . 21
Offsetabgleich . . . . . . . . . . . . . . . . . 22
Phasenabgleich CH1 gg. CH2 . . . . . . . . 22
Konditionierungsbeispiele . . . . . . . . . . . 23
1. Fotodioden-Array am Stromeingang,
LED-Versorgung über
Konstantstromquelle . . . . . . . . . . . 23
2. Encoder mit 100 mVss am
Spannungseingang . . . . . . . . . . . . 23
SIGNALKONDITIONIERUNG CH0 24
Verstärkungseinstellung CH0 . . . . . . . . . 24
Offsetabgleich CH0 . . . . . . . . . . . . . . 24
SIGNALPEGEL-REGLER und
SIGNALÜBERWACHUNG 25
SINUS-DIGITAL-WANDLUNG 26
AUSGANGSEINSTELLUNGEN UND
NULLSIGNAL 27
Nullsignal-Erzeugung . . . . . . . . . . . . . 27
Funktion der CFGABZ-Einstellung . . . . . . 28
Einstellungsbeispiel 1 . . . . . . . . . . . . . 28
Einstellungsbeispiel 2 . . . . . . . . . . . . . 28
Konfiguration der Ausgangstreiber . . . . . . 29
Mindestflankenabstand . . . . . . . . . . . . 29
FEHLERÜBERWACHUNG UND
ALARMAUSGABE 30
Fehlerprotokoll . . . . . . . . . . . . . . . . . 31
Strichzahlfehler . . . . . . . . . . . . . . . . . 31
Temperatur-Überwachung . . . . . . . . . . . 31
VERPOLUNGSSCHUTZ 32
TESTMODUS 33
Schnelle Umprogrammierung im
Single-Master-System . . . . . . . . . . 34
Schnelle Umprogrammierung im
Multi-Master-System . . . . . . . . . . . 34
APPLIKATIONSBEISPIELE 35
APPLIKATIONSHINWEISE 37
In-Circuit Programmierung des EEPROMs . . 37
Absolute Winkelgenauigkeit und Flankenjitter 37
Hinweise zum Demo-Board . . . . . . . . . . 37

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 4/39
GEHÄUSE
PIN-BELEGUNG TSSOP20 PIN-FUNKTIONEN
Nr. Name Funktion
1 X1 Signaleingang 1 (Index +)
2 X2 Signaleingang 2 (Index -)
3 X3 Signaleingang 3 (
4 X4 Signaleingang 4
5 VDDS Geschaltete Versorgungsspannung
(verpolungsicher, Last bis max. 20 mA)
6 GNDS Geschaltete Masse
(verpolungsicher)
7 X5 Signaleingang 5
8 X6 Signaleingang 6
9 ACO Signalpegel-Regler,
Highside-Stromquellen-Ausgang
10 SDA Serielle Konfigurations-Schnittstelle,
Datenleitung
11 SCL Serielle Konfigurations-Schnittstelle,
Taktleitung
12 NB Inkrementalausgang B-
13 PB Inkrementalausgang B+
14 NA Inkrementalausgang A-
15 PA Inkrementalausgang A+
16 GND Masse
17 VDD +4.3...5.5 V Versorgungsspannung
18 NZ Inkrementalausgang Z-
19 PZ Inkrementalausgang Z+
20 ERR Fehlersignal (Ein-/Ausgang) / Triggerein-
gang Testmodus

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 5/39
GRENZWERTE
Grenzwerte sind keine zulässigen Betriebsbedingungen, die Funktion ist nicht garantiert.
Eine Überschreitung von Grenzwerten kann den Baustein schädigen.
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Max.
G001 V() Spannung an VDD, PA, NA, PB, NB,
PZ, NZ, SCL, SDA, ACO
-6 6 V
G002 V() Spannung an ERR -6 8 V
G003 V() Pin-Pin Spannung 6 V
G004 V() Spannung an X1...X6, SCL, SDA -0.3 VDDS +
0.3
V
G005 I(VDD) Strom in VDD -20 400 mA
G006 I() Strom in VDDS, GNDS -50 50 mA
G007 I() Strom in X1...X6, SCL, SDA, ERR -20 20 mA
G008 I() Strom in PA, NA, PB, NB, PZ, NZ -100 100 mA
G009 I(ACO) Strom in ACO -100 20 mA
G010 Vd() Zulässige ESD-Prüfspannung an allen
Pins
HBM 100 pF entladen über 1.5 kΩ 2 kV
G011 Ptot Zulässige Verlustleistung 300 mW
G012 Tj Chip-Temperatur -40 150 °C
G013 Ts Lagertemperatur -40 150 °C
THERMISCHE DATEN
Betriebsbedingungen: VDD = 4.3 ... 5.5 V
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Typ Max.
T01 Ta Zulässiger
Umgebungstemperaturbereich
(erweiterter Temperaturbereich bis
-40 °C auf Anfrage)
-25 100 °C
T02 Rthja Thermischer Widerstand
Chip / Umgebung
80 K/W
Alle Spannungsangaben beziehen sich auf Pin GNDS, wenn kein anderer Bezugspunkt angegeben ist.
In den Baustein hinein fließende Ströme zählen positiv, heraus fließende Ströme negativ.
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 6/39
KENNDATEN
Betriebsbedingungen: VDD = 4.3...5.5 V, Tj = -40...125 °C, IBN auf 200 µA kalibriert, wenn nicht anders angegeben.
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Typ Max.
Allgemeines
001 V(VDD) Zulässige Versorgungsspannung Laststrom I(VDDS) bis 10 mA 4.3 5.5 VLaststrom I(VDDS) bis 20 mA 4.5 5.5 V
002 I(VDD) Versorgungsstrom Tj = -40...125 °C, keine Last 25 mATj = 27 °C, keine Last 12 mA
003 I(VDDS) Zulässiger Laststrom in VDDS -20 0 mA
004 Vcz()hi Clamp-Spannung hi an allen Pins 11 V
005 Vc()hi Clamp-Spannung hi an Eingän-
gen SCL, SDA
Vc()hi = V() - V(VDD), I() = 1 mA 0.4 1.5 V
006 Vc()hi Clamp-Spannung hi an Eingän-
gen X1...X6
Vc()hi = V() - V(VDD), I() = 4 mA 0.3 1.2 V
007 Vc()lo Clamp-Spannung lo an allen Pins I() = -4 mA -1.2 -0.3 V
Signalkonditionierung, Eingänge X1...X6 (CH1, CH2: i = 12, CH0: i = 0)
101 Vin()sig Zulässiger
EingangsspannungsbereichRINi() = 0x01 0.75 VDDS
− 1.5
V
RINi() = 0x09 0 VDDS V
102 Iin()sig Zulässiger Eingangsstrombereich RINi(0) = 0; BIASi = 0 -300 -10 µARINi(0) = 0; BIASi = 1 10 300 µA
103 Iin() Eingangsstrom RINi() = 0x01 -10 10 µA
104 Rin() Eingangswiderstand gg. VREFin Tj = 27 °C;RINi(3:0) = 0x09 16 20 24 kΩRINi(3:0) = 0x00 1.1 1.6 2.1 kΩRINi(3:0) = 0x02 1.6 2.3 3.0 kΩRINi(3:0) = 0x04 2.2 3.2 4.2 kΩRINi(3:0) = 0x06 3.2 4.6 6.0 kΩ
105 TC(Rin) Temperaturkoeffizient von Rin 0.15 %/K
106 VREFin() Referenzspannungen
VREFin0, VREFin12RINi(0) = 0, BIASi = 1 1.35 1.5 1.65 VRINi(0) = 0, BIASi = 0 2.25 2.5 2.75 V
107 G0, G12 Einstellbare Verstärkungsfaktoren RINi(3) = 0, GRi und GFi = 0x0 2RINi(3) = 0, GRi und GFi = max. 100
RINi(3) = 1, GRi und GFi = 0x0 0.5RINi(3) = 1, GRi und GFi = max. 25
108 Gdiff Relative Verstärkung CH1 gg.
CH2GF2 = 0x10, GF1 = 0x0 39 %GF2 = 0x10, GF1 = 0x7F 255 %
109 ∆G Inkrementschrittweite der
Verstärkungsfeineinstellungfür CH0 1.06für CH1 1.015für CH2 1.06
110 INL(Gi) Integraler Linearitätsfehler der
Verstärkungseinstellung
-1.06 1.06
111 Vin()diff Empfohlene
Diff.-EingangsspannungVin()diff = V(PCHx) - V(NCHx);RINi(3) = 0 10 500 mVppRINi(3) = 1 40 2000 mVpp
112 Vin()os Offsetspannung der
Eingangsstufe
bezogen auf Eingangsseite 25 µV
113 VOScal Abgleichbereich Offset bezogen auf die gewählte Quelle (VOS0 bzw.
VOS12), Modus Calibration 2;ORi = 00 ±100 %V()ORi = 01 ±200 %V()ORi = 10 ±600 %V()ORi = 11 ±1200 %V()
114 ∆OF0 CH0 Inkrementschrittweite für
Feinabgleich Offset
bezogen auf die gewählte Quelle VOS0;
OR0 = 0x0
3.2 %
115 ∆OF12 CH1/2 Inkrementschrittweite für
Feinabgleich Offset
bezogen auf die gewählte Quelle VOS12;
OR12 = 0x0
0.79 %
116 INL(OFi) Integraler Linearitätsfehler für
Offsetabgleich
eingeschränkte Testabdeckung (garantiert
durch Design)
-5 5 LSB
117 PHI12 Abgleichbereich Phasenkorrektur CH1 gegen CH2 ±20.2 °
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 7/39
KENNDATEN
Betriebsbedingungen: VDD = 4.3...5.5 V, Tj = -40...125 °C, IBN auf 200 µA kalibriert, wenn nicht anders angegeben.
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Typ Max.
118 ∆PHI12 Inkrementschrittweite der Pha-
senkorrektur
0.63 °
119 INL(PHI12) Integraler Linearitätsfehler der
Phasenkorrektur
eingeschränkte Testabdeckung (garantiert
durch Design)
-0.8 0.8 °
120 fin() Zulässige Maximale Eingangsfre-
quenz
analoger Signalpfad 200 kHz
121 Vout(X2) Ausgangsspannung an X2 BIASEX = 10, I(X2) = 0, bezogen auf VREFin12 95 100 105 %
122 Vin(X2) Zuässige Eingangsspannung an
X2
BIASEX = 11 0.5 VDDS
− 2
V
123 Rin(X2) Eingangswiderstand an X2 BIASEX = 11, RIN0(3:0) = 0x01, RIN12(3:0) =
0x01
20 27 30 kΩ
Sinus-Digital-Wandlung
201 AAabs Absolute Winkelgenauigkeit bezogen auf 360° Eingangssignale, ideale
Signalform, quasistatisches Signal, kalibrierte
Signalkonditionierung, SELHYS = 0
0.9 1.8 °
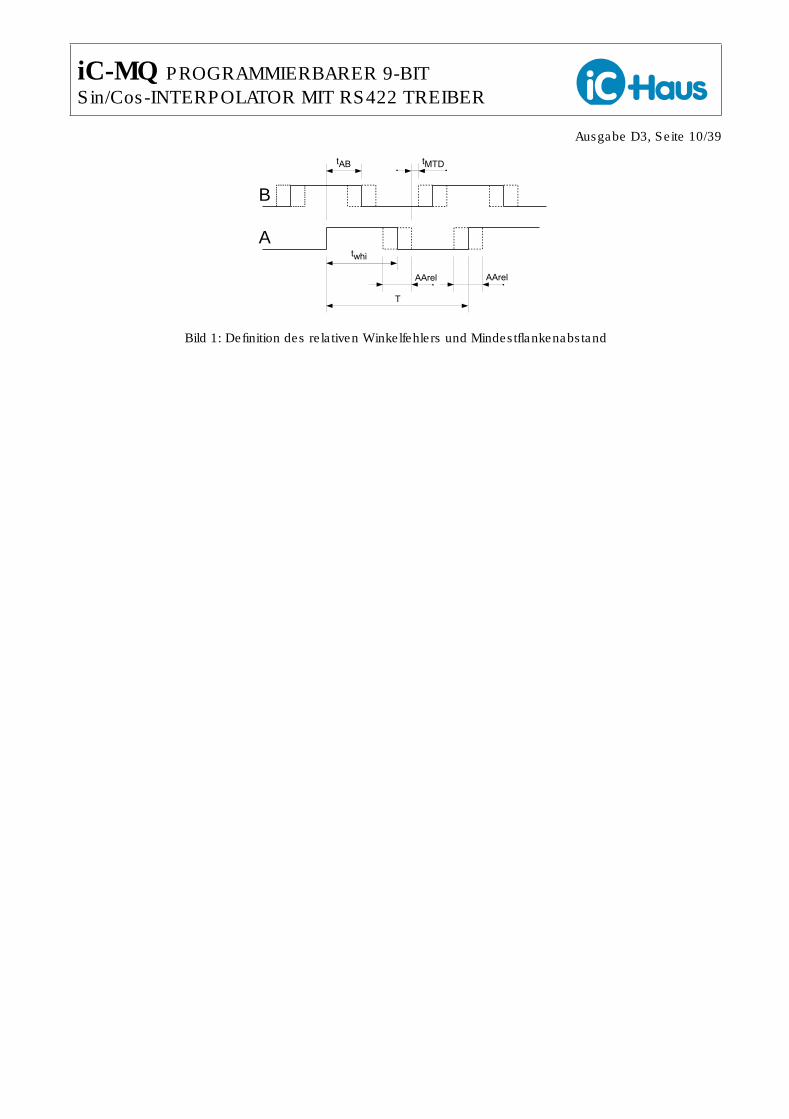
202 AArel Relativer Winkelfehler bezogen auf Ausgangsperiode T (siehe Bild 1),
ideale Signalform, quasistatische Signale;bei 4 Flanken pro Periode 10 %bei 100 Flanken pro Periode <0.5 10 %bei 384 Flanken pro Periode 10 %bei 400 Flanken pro Periode <2 10 %
203 AAR Wiederholgenauigkeit siehe 201, VDD = const., Tj = const. 0.1 °
Leitungstreiber PA, NA, PB, NB, PZ, NZ
501 Vs()hi Sättigungsspannung hi Vs() = VDD - V();SIK(1:0) = 00, I() = -1.2 mA 200 mVSIK(1:0) = 01, I() = -4 mA 200 mVSIK(1:0) = 10, I() = -20 mA 400 mVSIK(1:0) = 11, I() = -50 mA 700 mV
502 Vs()lo Sättigungsspannung lo SIK(1:0) = 00, I() = 1.2 mA 200 mVSIK(1:0) = 01, I() = 4 mA 200 mVSIK(1:0) = 10, I() = 20 mA 400 mVSIK(1:0) = 11, I() = 50 mA 700 mV
503 Isc()hi Kurzschlussstrom hi V() = 0 V;SIK(1:0) = 00 -4 -1.2 mASIK(1:0) = 01 -12 -4 mASIK(1:0) = 10 -60 -20 mASIK(1:0) = 11 -150 -50 mA
504 Isc()lo Kurzschlussstrom lo V() = VDD;SIK(1:0) = 00 1.2 4 mASIK(1:0) = 01 4 12 mASIK(1:0) = 10 20 60 mASIK(1:0) = 11 50 150 mA
505 tr() Anstiegszeit RL = 100 Ω nach GND;SSR(1:0) = 00 5 20 nsSSR(1:0) = 01 5 40 nsSSR(1:0) = 10 20 140 nsSSR(1:0) = 11 50 350 ns
506 tf() Abfallzeit RL = 100 Ω nach VDD;SSR(1:0) = 00 5 20 nsSSR(1:0) = 01 5 40 nsSSR(1:0) = 10 30 140 nsSSR(1:0) = 11 50 350 ns
507 Ilk()tri Leckstrom TRIHL(1:0) = 11, Tristate 20 100 µA
508 IIk()rev Leckstrom verpolte Versorgungsspannung 100 µA
509 Rin()cal Innenwiderstand für Testsignale Betriebsart Calibration 1, 2, 3 2.5 4 kΩ
510 I()cal Zulässige Testsignal-Belastung Betriebsart Calibration 1, 2, 3 -3 3 µA
511 tclk()lo Taktsignaldauer lo für CP, CPD,
CPUBetriebsart Mode 191/193;MTD = 0x0 110 nsMTD = 0x7 800 ns
512 tw()hi Tastverhältnis bezogen auf Ausgangsperiode T, siehe Bild 1 50 %

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 8/39
KENNDATEN
Betriebsbedingungen: VDD = 4.3...5.5 V, Tj = -40...125 °C, IBN auf 200 µA kalibriert, wenn nicht anders angegeben.
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Typ Max.
513 tAB Phasenlage A gg. B siehe Bild 1 25 %
514 tMTD Mindestflankenabstand Flanke zu Flanke, siehe Bild 1;MTD = 0x0, IBN auf 200 µA kalibriert 220 nsMTD = 0x0, IBN auf 220 µA kalibriert 200 ns
515 ∆t()MTD Toleranz Mindestflankenabstand Nennwerte in Tabelle 52 -15 15 %
516 ∆t()MTD Variation Mindestflankenabstand Veränderung gg. VDD = 5 V, Tj = 27 °C über
VDD = 4.3...5.5 V oder Tj = -40...125 °C
+/- 2 %
Signalpegel-Regler ACO
601 Vs()hi Sättigungsspannung hi Vs() = VDD - V();ADJ(8:0) = 0x11F, I(ACO) = -5 mA 1 VADJ(8:0) = 0x13F, I(ACO) = -10 mA 1 VADJ(8:0) = 0x15F, I(ACO) = -25 mA 1 VADJ(8:0) = 0x17F, I(ACO) = -50 mA 1.2 V
602 Isc()hi Kurzschlussstrom hi V() = 0 ... VDD - 1 V;ADJ(8:0) = 0x11F -10 -5 mAADJ(8:0) = 0x13F -20 -10 mAADJ(8:0) = 0x15F -50 -25 mAV() = 0 ... VDD - 1.2 V;ADJ(8:0) = 0x17F -100 -50 mA
603 It()min Überwachung Regelbereich 1:
untere Grenze
bezogen auf Bereich ADJ(6:5) 3 %Isc
604 It()max Überwachung Regelbereich 2:
obere Grenze
bezogen auf Bereich ADJ(6:5) 90 %Isc
605 Vt()min Überwachung Signalpegel 1:
untere Grenze
bezogen auf Vscq() 40 %Vpp
606 Vt()max Überwachung Signalpegel 2:
obere Grenze
bezogen auf Vscq() 130 %Vpp
Bias-Stromquelle und Referenzspannungen
801 IBN Bias-Stromquelle Calibration 1, I(NB) gg. VDDS;CFGIBN = 0x0 110 µACFGIBN = 0xF 370 µAIBN bei T = 25 °C abgeglichen 180 200 220 µA
802 VBG Interne Bandgap-Referenz 1.2 1.25 1.3 V
803 VPAH Referenzspannung 45 50 55 %VDDS
804 V05 Referenzspannung V05 450 500 550 mV
805 V025 Referenzspannung V025 50 %V05
Power-Down-Reset
901 VDDon Einschaltschwelle VDD, System-
freigabe
zunehmende Spannung an VDD 3.6 4.0 4.3 V
902 VDDoff Abschaltschwelle VDD, Power-
Down-Reset
abnehmende Spannung an VDD 3.0 3.5 3.8 V
903 VDDhys Hysterese 0.4 V
Fehlersignal Eingang/Ausgang, Pin ERR
B01 Vs()lo Sättigungsspannung lo gegen GND, I() = 4 mA 0.4 V
B02 Isc()lo Kurzschlussstrom lo gegen GND, V(ERR) ≤ VDD 4 5 8 mA
B03 Isc() Low-Side Quellenstrom für
Datenausgabegegen GND, V(ERR) > VTMonL-Zustand 2 mAZ-Zustand 0 mA
B04 Vt()hi Eingangsschwellspannung hi gegen GND 2 V
B05 Vt()lo Eingangsschwellspannung lo gegen GND 0.8 V
B06 Vt()hys Eingangshysterese Vt()hys = Vt()hi − Vt()lo 300 500 mV
B07 Ipu() Eingangs-Pull-Up-Strom V() = 0...VDD − 1 V, EPU = 1 -400 -300 -200 µA
B08 Vpu() Pull-Up-Spannung Vpu() = VDD − V(), I() = -5 µA, EPU = 1 0.4 V
B09 VTMon Einschaltschwelle Testmodus zunehmende Spannung an ERR VDD +
2
V

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 9/39
KENNDATEN
Betriebsbedingungen: VDD = 4.3...5.5 V, Tj = -40...125 °C, IBN auf 200 µA kalibriert, wenn nicht anders angegeben.
Kenn- Formel- Benennung Bedingungen Einh.Nr. zeichen Min. Typ Max.
B10 VTMoff Abschaltschwelle Testmodus abnehmende Spannung an ERR VDD +
0.5
V
B11 VTMhys Hysterese Testmodus VTMhys = VTMon − VTMoff 0.15 0.3 V
B12 fclk() Signalfrequenz zur
DatenausgabeENFAST = 0 120 160 200 kHzENFAST = 1 480 640 800 kHz
B13 tp(ERR)in Sperrzeit für Verarbeitung einer
Systemfehler-Meldung an ERR
nach dem Einschalten (VDD > VDDon) 10 ms
Verpolungsschutz und Spannungsschalter VDDS, GNDS
C01 Vs() Sättigungsspannung gg. VDD Vs(VDDS) = VDD − V(VDDS);I(VDDS) = -10...0 mA 150 mVI(VDDS) = -20...-10 mA 250 mV
C02 Vs() Sättigungsspannung gg. GND Vs(GNDS) = V(GNDS) − GND;I(GNDS) = 0...10 mA 150 mVI(GNDS) = 10...20 mA 200 mV
C03 Irev(VDD) Stromaufnahme bei Verpolung V(VDD) = −5.5 V...−4.3 V -1 0 mA
Serielle Konfigurations-Schnittstelle SCL, SDA
D01 Vs()lo Sättigungsspannung lo I = 4 mA 400 mV
D02 Isc()lo Kurzschlussstrom lo 4 75 mA
D03 Vt()hi Eingangsschwellspannung hi 2 V
D04 Vt()lo Eingangsschwellspannung lo 0.8 V
D05 Vt()hys Eingangshysterese Vt()hys = Vt()hi − Vt()lo 300 500 mV
D06 Ipu() Eingangs-Pull-Up-Strom V() = 0...VDDS − 1 V -600 -300 -60 µA
D07 Vpu() Pull-Up-Spannung Vpu() = VDDS − V(), I() = -5 µA 0.4 V
D08 fclk() Taktfrequenz an SCL ENFAST = 0 60 80 100 kHzENFAST = 1 240 320 400 kHz
D09 tbusy()cfg Dauer der Konfigurationsphase IBN nicht abgeglichen, EEPROM-Zugriff ohne
Lesefehler, Zeit bis Ausgangsfunktion;ENFAST = 0 36 48 msENFAST = 1 24 34 ms
D10 tbusy()err Ende der I2C-Kommunikation;
Zeit bis Freigabe der I2C-Slave
Funktion
IBN nicht abgeglichen;V(SDA) = 0 V 4 12 msV(SCL) = 0 V oder Arbitrierung verloren indef. mskein EEPROM 45 135 msCRC-Fehler 95 285 ms
D11 tp() Übernahme der Masterfunktion
nach I2C-Protokollfehler
SCL ohne Taktsignal: V(SCL) = konstant;IBN nicht abgeglichen 25 80 240 µsIBN auf 200µA abgeglichen 64 80 120 µs
Temperatur-Überwachung
E01 VTs Sensorspannung
TemperatursensorVTs() = VDDS − V(PA),Calibration 3, ohne Last;Tj = -40 °C 740 770 790 mVTj = 27 °C 620 650 670 mVTj = 100 °C 460 520 540 mV
E02 TCs Temperaturkoeffizient Sensor-
spannung
-1.8 mV/K
E03 VTth Einschaltschwellspannung für
TemperaturwarnungVTth() = VDDS − V(NA), Tj = 27 °C,Calibration 3, ohne Last;CFGTA(3:0) = 0x0 260 310 360 mVCFGTA(3:0) = 0xF 470 550 630 mV
E04 TCth Temperaturkoeffizient der Ein-
schaltschwellspannung
0.06 %/K
E05 Tw Einschaltschwelle der
TemperaturwarnungCFGTA(3:0) = 0x0 125 140 °CCFGTA(3:0) = 0xF 65 80 °C
E06 Thys Temperaturhysterese Warnung 80 °C < Tj < 125 °C 10 15 25 °C
E07 ∆T Relative Abschalttemperatur ∆T = Toff − Tw 5 15 25 °C
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 10/39
A
B
tAB tMTD
twhi
T
AArel AArel
Bild 1: Definition des relativen Winkelfehlers und Mindestflankenabstand
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 11/39
PROGRAMMIERUNG
Registerbelegung, Übersicht . . . . . . . . . . . . . . Seite 12
Serielle Konfigurations-Schnittstelle . . . . . . Seite 14
ENFAST: I2C Fast-Mode Freigabe
ENSL: I2C Slave-Mode Freigabe
DEVID: Device-ID für EEPROM mit
Konfigurationsdaten (z. B. 0x50)
CHKSUM: CRC über Konfigurationsdaten
(Adressbereich 0x00 bis 0x2F)
CHPREL: Chip Release
END: Konfigurationsfreigabe
Kalibrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 16
CFGIBN: Bias-Strom
CFGTA: Temperatur-Überwachung
Betriebsarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 17
MODE: Betriebsarten
Eingangskonfiguration und
Signalpfad-Multiplexer . . . . . . . . . . . . . . . . . . . . .Seite 19
INMODE: Umschaltung differenzielle /
referenz-bezogene Signale
RIN12: I/U-Modus und Eingangswiderstand
CH1, CH2
BIAS12: Referenzspannung CH1, CH2
RIN0: I/U-Modus und Eingangswiderstand
CH0
BIAS0: Referenzspannung CH0
BIASEX: Eingangsseitige Referenzauswahl
INVZ: Invertierung Nullimpuls
MUXIN: Zuordnung Eingang zum Kanal:
X3...X6 zu CH1, CH2
Signalkonditionierung CH1, CH2 (X3...X6) Seite 21
GR12: Verstärkungsbereich CH1, CH2 (grob)
GF1: Verstärkungsfaktor CH1 (fein)
GF2: Verstärkungsfaktor CH2 (fein)
VOS12: Offset-Bezugsquelle CH1, CH2
VDC1: Mittenpotential CH1
VDC2: Mittenpotential CH2
OR1: Offset-Abgleichbereich CH1 (grob)
OF1: Offsetfaktor CH1 (fein)
OR2: Offset-Abgleichbereich CH2 (grob)
OF2: Offsetfaktor CH2 (fein)
PH12: Phasenabgleich CH1 gg. CH2
Signalkonditionierung CH0 (X1, X2) . . . . . . .Seite 24
GR0: Verstärkungbereich CH0 (grob)
GF0: Verstärkungsfaktor CH0 (fein)
VOS0: Offset-Bezugsquelle CH0
OR0: Offset-Abgleichbereich CH0 (grob)
OF0: Offset-Faktor CH0 (fein)
Signalpegel-Regler . . . . . . . . . . . . . . . . . . . . . . . . Seite 25
ADJ: Programmierung der ACO Funktion
Sinus-Digital-Wandlung . . . . . . . . . . . . . . . . . . . Seite 26
SELRES: Auflösung
SELHYS: Hysterese
Ausgabelogik Quadratursignale . . . . . . . . . . .Seite 27
CFGABZ: Ausgabelogik
CFGZPOS: Nullsignal-Positionierung
ENZFF: Nullsignal-Synchronisation
Ausgangseinstellungen Quadratursignale Seite 29
MTD: Mindestflankenabstand
SIK: Treiber Kurzschlussstrom
SSR: Treiber Slewrate
TRIHL: Treiber Betriebsart
Fehlerüberwachung und Alarmausgabe . . Seite 30
EMTD: Minimale Alarmanzeigedauer
EPH: Alarm-Ein-/Ausgabe-Logik
EPU: Pull-Up-Freigabe für Alarmausgang
EMASKA: Fehlermaske für Alarmanzeige (Pin
ERR)
EMASKE: Fehlermaske für Protokoll (EEPROM)
EMASKO: Fehlermaske für Treiberabschaltung
PDMODE: Treiberaktivierung nach
Wiedereinschalten
LINECNT: Strichzahl (Linien) zwischen 2
Nullimpulsen
ERR1: Fehlerprotokoll: Erster Fehler
ERR2: Fehlerprotokoll: Letzter Fehler
ERR3: Fehlerprotokoll: Historie
Testmodus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 33
EMODE: Testmodus
EMODE2: Register- und Adressauswahl für
Testmodus
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 12/39
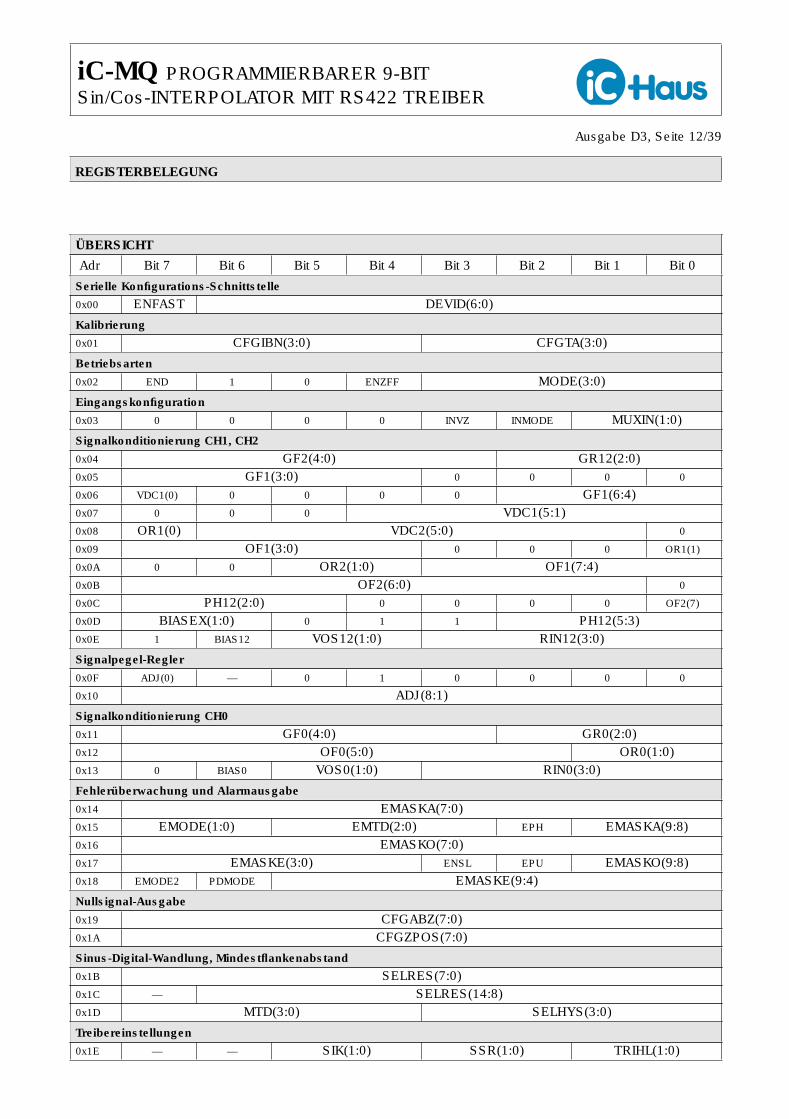
REGISTERBELEGUNG
ÜBERSICHT
Adr Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Serielle Konfigurations-Schnittstelle
0x00 ENFAST DEVID(6:0)
Kalibrierung
0x01 CFGIBN(3:0) CFGTA(3:0)
Betriebsarten
0x02 END 1 0 ENZFF MODE(3:0)
Eingangskonfiguration
0x03 0 0 0 0 INVZ INMODE MUXIN(1:0)
Signalkonditionierung CH1, CH2
0x04 GF2(4:0) GR12(2:0)
0x05 GF1(3:0) 0 0 0 0
0x06 VDC1(0) 0 0 0 0 GF1(6:4)
0x07 0 0 0 VDC1(5:1)
0x08 OR1(0) VDC2(5:0) 0
0x09 OF1(3:0) 0 0 0 OR1(1)
0x0A 0 0 OR2(1:0) OF1(7:4)
0x0B OF2(6:0) 0
0x0C PH12(2:0) 0 0 0 0 OF2(7)
0x0D BIASEX(1:0) 0 1 1 PH12(5:3)
0x0E 1 BIAS12 VOS12(1:0) RIN12(3:0)
Signalpegel-Regler
0x0F ADJ(0) — 0 1 0 0 0 0
0x10 ADJ(8:1)
Signalkonditionierung CH0
0x11 GF0(4:0) GR0(2:0)
0x12 OF0(5:0) OR0(1:0)
0x13 0 BIAS0 VOS0(1:0) RIN0(3:0)
Fehlerüberwachung und Alarmausgabe
0x14 EMASKA(7:0)
0x15 EMODE(1:0) EMTD(2:0) EPH EMASKA(9:8)
0x16 EMASKO(7:0)
0x17 EMASKE(3:0) ENSL EPU EMASKO(9:8)
0x18 EMODE2 PDMODE EMASKE(9:4)
Nullsignal-Ausgabe
0x19 CFGABZ(7:0)
0x1A CFGZPOS(7:0)
Sinus-Digital-Wandlung, Mindestflankenabstand
0x1B SELRES(7:0)
0x1C — SELRES(14:8)
0x1D MTD(3:0) SELHYS(3:0)
Treibereinstellungen
0x1E — — SIK(1:0) SSR(1:0) TRIHL(1:0)

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 13/39
ÜBERSICHT
Adr Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Linienzähler
0x1F LINECNT(7:0)
0x20 — — LINECNT(13:8)
Reserviert
0x21 0 0 0 0 1 0 0 0
0x22 — — — — — — — —
0x23 — — — — — — — —
0x24 reserviert fuer applikationsspezifische Daten
0x25 reserviert fuer applikationsspezifische Daten
0x26 reserviert fuer applikationsspezifische Daten
0x27 reserviert fuer applikationsspezifische Daten
0x28 reserviert fuer applikationsspezifische Daten
0x29 reserviert fuer applikationsspezifische Daten
0x2A reserviert fuer applikationsspezifische Daten
0x2B reserviert fuer applikationsspezifische Daten
0x2C reserviert fuer applikationsspezifische Daten
0x2D reserviert fuer applikationsspezifische Daten
0x2E reserviert fuer applikationsspezifische Daten
Prüfsumme
0x2F EEPROM: CHKSUM(7:0) / ROM: CHPREL(7:0)
Fehlerspeicher
0x30 ERR1(7:0)
0x31 ERR2(5:0) ERR1(9:8)
0x32 ERR3(3:0) ERR2(9:6)
0x33 — — ERR3(9:4)
Hinweis Nach dem Einschalten enthält das Baustein-RAM zunächst zufällige Werte.
Tab. 4: Registerbelegung

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 14/39
SERIELLE KONFIGURATIONS-SCHNITTSTELLE
Die serielle Konfigurations-Schnittstelle besteht aus
den beiden Pins SCL und SDA und ermöglicht
Schreib- und Lesezugriffe auf ein EEPROM mit I2C-
Schnittstelle. Mit dem Registerbit ENFAST kann die
Auslesegeschwindigkeit gewählt werden.
ENFAST Adr 0x00, bit 7
Code Funktion
0 Normale Taktfrequenz, f(SCL) ca. 80 kHz
1 Hohe Taktfrequenz, f(SCL) ca. 320 kHz
Hinweise Zur In-Circuit Programmierung benötigen die
Busleitungen SCL und SDA Pull-Up-Widerstände.
Für Leitungskapazitäten bis 170 pF genügen:
4.7 kΩ für 80 kHz Taktfrequenz
2 kΩ für 320 kHz Taktfrequenz
Die Pull-Up-Widerstände dürfen 1.5 kΩ nicht
unterschreiten. Zur Signaltrennung ist eine
Massebahn zwischen SCL und SDA
empfehlenswert.
Zur Programmierung des EEPROMs muss iC-MQ
ebenfalls Versorgungsspannung erhalten (5 V and
VDD).
Tab. 5: Taktfrequenz Konfigurations-Schnittstelle
Nach dem Einschalten der Versorgung sind die Aus-
gänge von iC-MQ hochohmig (Tristate*) bis eine gülti-
ge Konfiguration aus dem EEPROM mit der Device-ID
0x50 ausgelesen wurde.
Bitfehler im Speicherbereich 0x00 bis 0x2F werden
durch den im Register CHKSUM(7:0) hinterlegten
CRC-Wert erkannt (Adr 0x2F im EEPROM, CRC-
Polynom “1 0001 1101“ mit Startwert "1").
Werden die gelesenen Konfigurationsdaten nicht
durch den CRC-Wert bestätigt, wird der Einlesevor-
gang wiederholt. Sind nach dem vierten Einlesevor-
gang keine gültigen Konfigurationsdaten vorhanden,
beendet iC-MQ den EEPROM-Zugriff und wechselt in
den I2C-Slave-Modus. Dieser Wechsel erfolgt spätes-
tens nach 150 ms (siehe Kenndaten D11), zum Bei-
spiel wenn kein EEPROM angeschlossen ist.
Für Bausteine, die eine gültige Konfiguration aus dem
EEPROM laden, entscheidet das Register-Bit ENSL
über die Freigabe der I2C-Slave-Funktion.
ENSL Adr 0x17, bit 3
Code Funktion
0 Normalbetrieb
1 I2C-Slave-Mode Freigabe (Device-ID 0x55)
Tab. 6: Modus Konfigurations-Schnittstelle
In das Register DEVID(6:0) (Adr 0x00) ist die Device-
ID für das EEPROM eintragbar, aus dem iC-MQ die
Konfiguration nach Verlassen des Testmodus bezie-
hen soll (siehe Seite 33). Die darin gespeicherte DE-
VID wird nachfolgend übernommen.
Beispiel der CRC Berechnungsroutine
unsigned char ucDataStream = 0;i n t iCRCPoly = 0x11D ;unsigned char ucCRC=0;i n t i = 0 ;
ucCRC = 1; / / s t a r t value ! ! !for ( iReg = 0; iReg <47; iReg ++)
ucDataStream = ucGetValue ( iReg ) ;for ( i =0; i <=7; i ++)
i f ( ( ucCRC & 0x80 ) != ( ucDataStream & 0x80 ) )ucCRC = (ucCRC << 1) ^ iCRCPoly ;
elseucCRC = (ucCRC << 1 ) ;
ucDataStream = ucDataStream << 1;
EEPROM-Auswahl
Folgende Mindestanforderungen müssen erfüllt sein:
• Funktion ab 3.3 bis 5 V, I2C-Schnittstelle
• Mindestens 512 bit, 64x8
(genutzter Adressbereich: 0x00 bis 0x3F)
• Unterstützung von Page Write mit mindestens
4 Byte großen Pages. Andernfalls muss auf die
Protokollierung von Fehlern im EEPROM ver-
zichtet werden (EMASKE = 0x0).
• Device ID 0x50 "1010 000", keine Belegung von
0x55 (A2...A0 = 0). Andernfalls kann iC-MQ nicht
über 0x55 im I2C Slave-Mode angesprochen
werden.
Bausteinempfehlung: Atmel AT24C01B, ST M24C01W
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 15/39
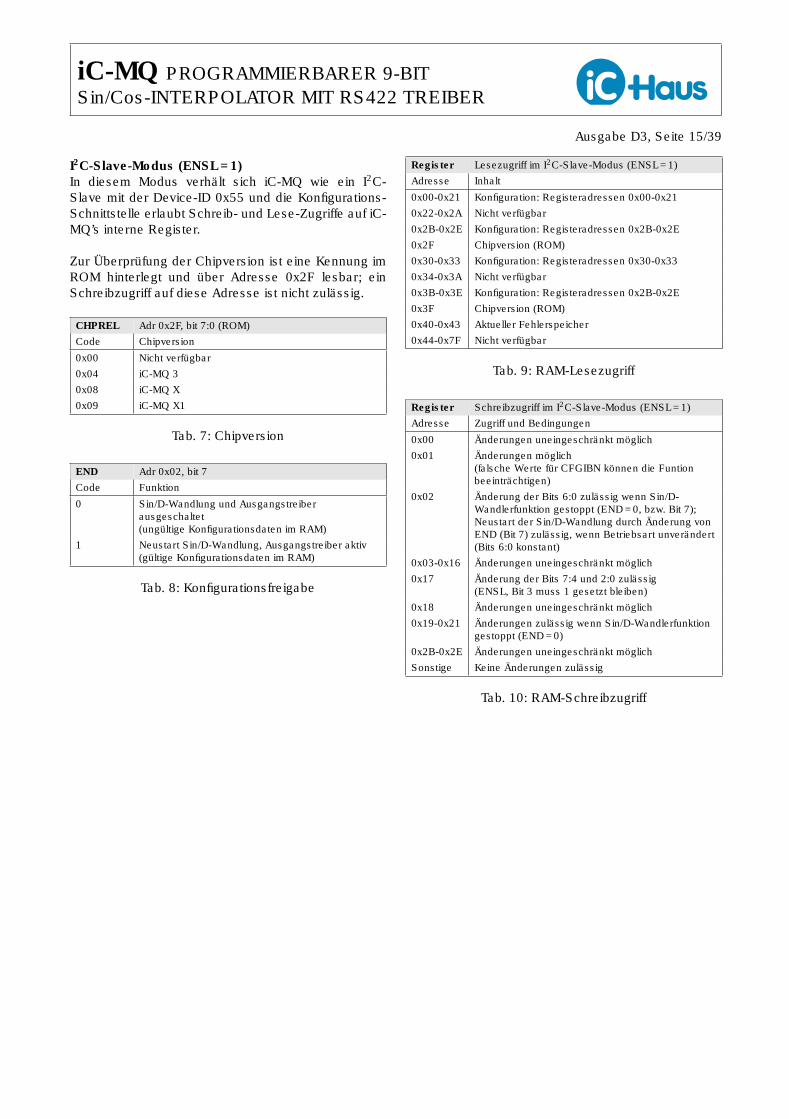
I2C-Slave-Modus (ENSL = 1)
In diesem Modus verhält sich iC-MQ wie ein I2C-
Slave mit der Device-ID 0x55 und die Konfigurations-
Schnittstelle erlaubt Schreib- und Lese-Zugriffe auf iC-
MQ’s interne Register.
Zur Überprüfung der Chipversion ist eine Kennung im
ROM hinterlegt und über Adresse 0x2F lesbar; ein
Schreibzugriff auf diese Adresse ist nicht zulässig.
CHPREL Adr 0x2F, bit 7:0 (ROM)
Code Chipversion
0x00 Nicht verfügbar
0x04 iC-MQ 3
0x08 iC-MQ X
0x09 iC-MQ X1
Tab. 7: Chipversion
END Adr 0x02, bit 7
Code Funktion
0 Sin/D-Wandlung und Ausgangstreiber
ausgeschaltet
(ungültige Konfigurationsdaten im RAM)
1 Neustart Sin/D-Wandlung, Ausgangstreiber aktiv
(gültige Konfigurationsdaten im RAM)
Tab. 8: Konfigurationsfreigabe
Register Lesezugriff im I2C-Slave-Modus (ENSL = 1)
Adresse Inhalt
0x00-0x21 Konfiguration: Registeradressen 0x00-0x21
0x22-0x2A Nicht verfügbar
0x2B-0x2E Konfiguration: Registeradressen 0x2B-0x2E
0x2F Chipversion (ROM)
0x30-0x33 Konfiguration: Registeradressen 0x30-0x33
0x34-0x3A Nicht verfügbar
0x3B-0x3E Konfiguration: Registeradressen 0x2B-0x2E
0x3F Chipversion (ROM)
0x40-0x43 Aktueller Fehlerspeicher
0x44-0x7F Nicht verfügbar
Tab. 9: RAM-Lesezugriff
Register Schreibzugriff im I2C-Slave-Modus (ENSL = 1)
Adresse Zugriff und Bedingungen
0x00 Änderungen uneingeschränkt möglich
0x01 Änderungen möglich
(falsche Werte für CFGIBN können die Funtion
beeinträchtigen)
0x02 Änderung der Bits 6:0 zulässig wenn Sin/D-
Wandlerfunktion gestoppt (END = 0, bzw. Bit 7);
Neustart der Sin/D-Wandlung durch Änderung von
END (Bit 7) zulässig, wenn Betriebsart unverändert
(Bits 6:0 konstant)
0x03-0x16 Änderungen uneingeschränkt möglich
0x17 Änderung der Bits 7:4 und 2:0 zulässig
(ENSL, Bit 3 muss 1 gesetzt bleiben)
0x18 Änderungen uneingeschränkt möglich
0x19-0x21 Änderungen zulässig wenn Sin/D-Wandlerfunktion
gestoppt (END = 0)
0x2B-0x2E Änderungen uneingeschränkt möglich
Sonstige Keine Änderungen zulässig
Tab. 10: RAM-Schreibzugriff

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 16/39
BIAS-STROMQUELLE UND TEMPERATURSENSOR-KALIBRIERUNG
Bias-Strom
Die Kalibrierung der Bias-Stromquelle in der Betriebs-
art Calibration 1 (siehe Tabelle 13) ist Vorausset-
zung für die Einhaltung der ausgewiesenen elektri-
schen Kenndaten und mitbestimmend für das Chip-
Timing (z.B. SCL-Taktfrequenz). Zur Einstellung wird
der IBN Bias-Strom über einen 10-kΩ-Widerstand von
Pin VDDS gg. Pin NB gemessen. Der Sollwert ist
200 µA, was einer Messspannung von 2 V entspricht.
CFGIBN Adr 0x01, bit 7:4
Code k IBN ∼ 3139−k
Code k IBN ∼ 3139−k
0x0 79 % 0x8 100 %
0x1 81 % 0x9 103 %
0x2 84 % 0xA 107 %
0x3 86 % 0xB 111 %
0x4 88 % 0xC 115 %
0x5 91 % 0xD 119 %
0x6 94 % 0xE 124 %
0x7 97 % 0xF 129 %
Tab. 11: Bias-Strom
Temperatursensor
Die Kalibrierung der Temperaturüberwachung erfolgt
in der Betriebsart Calibration 3.
Für die Einstellung auf die gewünschte Warnungstem-
peratur T2 wird zunächst die Sensorspannung VTs des
Temperatursensors bestimmt, bei der die Warnungs-
meldung erfolgt. Dazu wird am Pin PA eine Span-
nungsrampe von VDDS in Richtung GNDS durchfah-
ren, bis Pin ERR die Warnungsmeldung anzeigt. Dazu
sind die folgenden Einstellungen erforderlich: EMAS-
KA = 0x20, EMTD = 0x00, EPH = 0x00.
Das Signal an ERR wechselt zunächst von Tri-State
nach Low (bei Erreichen der Warnungsschwelle VTs)
und nachfolgend von Low nach Tri-State (bei Über-
schreitung der internen Hysterese, was für die Kali-
brierung nicht relevant ist). Um Verwechslungen aus-
zuschliessen, sollte ein eindeutiger Zustandswechsel
(von Low nach High) mit Hilfe eines externen Pull-Up-
Widerstands am Pin ERR erzeugt werden.
Beispiel: VTs(T1) ist ca. 650 mV, gemessen von VDDS
gegen PA, bei T1 = 25 °C;
Anschliessend wird die benötigte Vergleichsspannung
VTth(T1) berechnet. In diese Berechnung geht die ge-
wünschte Warnungstemperatur T2, die Temperaturko-
effizienten TCs und TCth (für TCs und TCth siehe el.
Kenndaten Abschnitt E), sowie der Messwert VTs(T1)
ein:
VTth(T1) =VTs(T1) + TCs · (T2 − T1)
1 + TCth · (T2 − T1)
Beispiel: Für T2 = T1 + 100 K muss VTth(T1) auf
443 mV programmiert werden.
Die Vergleichsspannung VTth(T1) steht für eine hoch-
ohmige Messung (10 MΩ) am Ausgangspin NA zur
Verfügung (Messung gg. VDDS) und muss durch Pro-
grammierung von CFGTA(3:0) auf den berechneten
Wert eingestellt werden.
Beispiel: Die Änderung von VTth(T1) von 310 mV (ge-
messen für CFGTA(3:0)= 0x0) auf 443 mV entspricht
143 %, der nächstliegende Wert für CFGTA ist 0x9;
CFGTA Adr 0x01, bit 3:0
Code k VTth ∼ 65+3k65
Code k VTth ∼ 65+3k65
0x0 100 % 0x8 137 %
0x1 105 % 0x9 142 %
0x2 109 % 0xA 146 %
0x3 114 % 0xB 151 %
0x4 118 % 0xC 155 %
0x5 123 % 0xD 160 %
0x6 128 % 0xE 165 %
0x7 132 % 0xF 169 %
Hinweise Bei CFGTA = 0xF ist Toff 80 °C typ.,
bei CFGTA = 0x0 ist Toff 155 °C typ.
Tab. 12: Temperatur-Überwachung
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 17/39
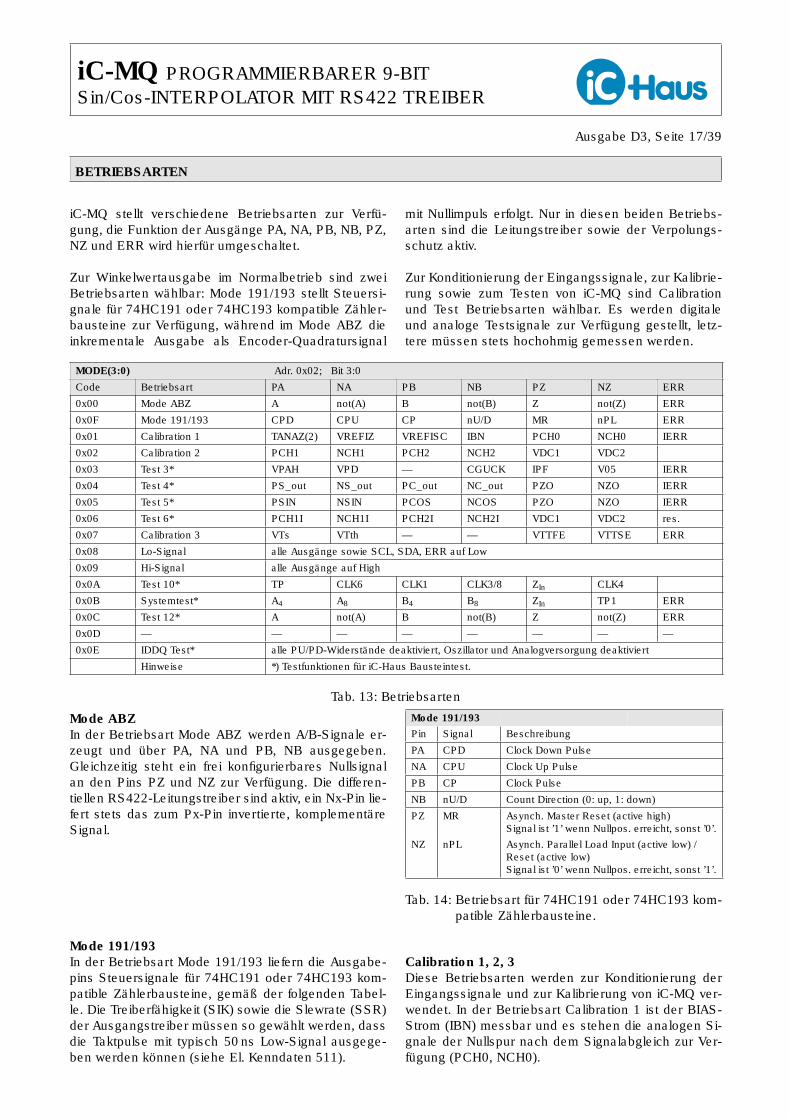
BETRIEBSARTEN
iC-MQ stellt verschiedene Betriebsarten zur Verfü-
gung, die Funktion der Ausgänge PA, NA, PB, NB, PZ,
NZ und ERR wird hierfür umgeschaltet.
Zur Winkelwertausgabe im Normalbetrieb sind zwei
Betriebsarten wählbar: Mode 191/193 stellt Steuersi-
gnale für 74HC191 oder 74HC193 kompatible Zähler-
bausteine zur Verfügung, während im Mode ABZ die
inkrementale Ausgabe als Encoder-Quadratursignal
mit Nullimpuls erfolgt. Nur in diesen beiden Betriebs-
arten sind die Leitungstreiber sowie der Verpolungs-
schutz aktiv.
Zur Konditionierung der Eingangssignale, zur Kalibrie-
rung sowie zum Testen von iC-MQ sind Calibration
und Test Betriebsarten wählbar. Es werden digitale
und analoge Testsignale zur Verfügung gestellt, letz-
tere müssen stets hochohmig gemessen werden.
MODE(3:0) Adr. 0x02; Bit 3:0
Code Betriebsart PA NA PB NB PZ NZ ERR
0x00 Mode ABZ A not(A) B not(B) Z not(Z) ERR
0x0F Mode 191/193 CPD CPU CP nU/D MR nPL ERR
0x01 Calibration 1 TANAZ(2) VREFIZ VREFISC IBN PCH0 NCH0 IERR
0x02 Calibration 2 PCH1 NCH1 PCH2 NCH2 VDC1 VDC2
0x03 Test 3* VPAH VPD — CGUCK IPF V05 IERR
0x04 Test 4* PS_out NS_out PC_out NC_out PZO NZO IERR
0x05 Test 5* PSIN NSIN PCOS NCOS PZO NZO IERR
0x06 Test 6* PCH1I NCH1I PCH2I NCH2I VDC1 VDC2 res.
0x07 Calibration 3 VTs VTth — — VTTFE VTTSE ERR
0x08 Lo-Signal alle Ausgänge sowie SCL, SDA, ERR auf Low
0x09 Hi-Signal alle Ausgänge auf High
0x0A Test 10* TP CLK6 CLK1 CLK3/8 ZIn CLK4
0x0B Systemtest* A4 A8 B4 B8 ZIn TP1 ERR
0x0C Test 12* A not(A) B not(B) Z not(Z) ERR
0x0D — — — — — — — —
0x0E IDDQ Test* alle PU/PD-Widerstände deaktiviert, Oszillator und Analogversorgung deaktiviert
Hinweise *) Testfunktionen für iC-Haus Bausteintest.
Tab. 13: Betriebsarten
Mode ABZ
In der Betriebsart Mode ABZ werden A/B-Signale er-
zeugt und über PA, NA und PB, NB ausgegeben.
Gleichzeitig steht ein frei konfigurierbares Nullsignal
an den Pins PZ und NZ zur Verfügung. Die differen-
tiellen RS422-Leitungstreiber sind aktiv, ein Nx-Pin lie-
fert stets das zum Px-Pin invertierte, komplementäre
Signal.
Mode 191/193
In der Betriebsart Mode 191/193 liefern die Ausgabe-
pins Steuersignale für 74HC191 oder 74HC193 kom-
patible Zählerbausteine, gemäß der folgenden Tabel-
le. Die Treiberfähigkeit (SIK) sowie die Slewrate (SSR)
der Ausgangstreiber müssen so gewählt werden, dass
die Taktpulse mit typisch 50 ns Low-Signal ausgege-
ben werden können (siehe El. Kenndaten 511).
Mode 191/193
Pin Signal Beschreibung
PA CPD Clock Down Pulse
NA CPU Clock Up Pulse
PB CP Clock Pulse
NB nU/D Count Direction (0: up, 1: down)
PZ MR Asynch. Master Reset (active high)
Signal ist ’1’ wenn Nullpos. erreicht, sonst ’0’.
NZ nPL Asynch. Parallel Load Input (active low) /
Reset (active low)
Signal ist ’0’ wenn Nullpos. erreicht, sonst ’1’.
Tab. 14: Betriebsart für 74HC191 oder 74HC193 kom-
patible Zählerbausteine.
Calibration 1, 2, 3
Diese Betriebsarten werden zur Konditionierung der
Eingangssignale und zur Kalibrierung von iC-MQ ver-
wendet. In der Betriebsart Calibration 1 ist der BIAS-
Strom (IBN) messbar und es stehen die analogen Si-
gnale der Nullspur nach dem Signalabgleich zur Ver-
fügung (PCH0, NCH0).
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 18/39
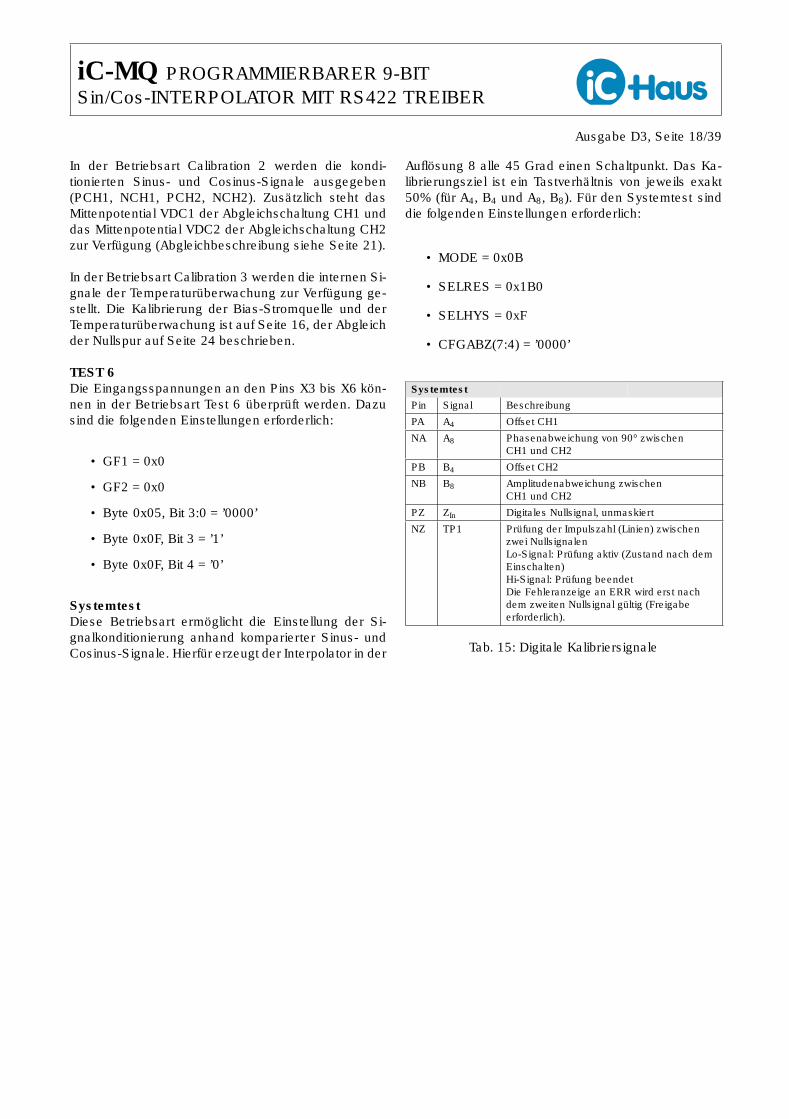
In der Betriebsart Calibration 2 werden die kondi-
tionierten Sinus- und Cosinus-Signale ausgegeben
(PCH1, NCH1, PCH2, NCH2). Zusätzlich steht das
Mittenpotential VDC1 der Abgleichschaltung CH1 und
das Mittenpotential VDC2 der Abgleichschaltung CH2
zur Verfügung (Abgleichbeschreibung siehe Seite 21).
In der Betriebsart Calibration 3 werden die internen Si-
gnale der Temperaturüberwachung zur Verfügung ge-
stellt. Die Kalibrierung der Bias-Stromquelle und der
Temperaturüberwachung ist auf Seite 16, der Abgleich
der Nullspur auf Seite 24 beschrieben.
TEST 6
Die Eingangsspannungen an den Pins X3 bis X6 kön-
nen in der Betriebsart Test 6 überprüft werden. Dazu
sind die folgenden Einstellungen erforderlich:
• GF1 = 0x0
• GF2 = 0x0
• Byte 0x05, Bit 3:0 = ’0000’
• Byte 0x0F, Bit 3 = ’1’
• Byte 0x0F, Bit 4 = ’0’
Systemtest
Diese Betriebsart ermöglicht die Einstellung der Si-
gnalkonditionierung anhand komparierter Sinus- und
Cosinus-Signale. Hierfür erzeugt der Interpolator in der
Auflösung 8 alle 45 Grad einen Schaltpunkt. Das Ka-
librierungsziel ist ein Tastverhältnis von jeweils exakt
50% (für A4, B4 und A8, B8). Für den Systemtest sind
die folgenden Einstellungen erforderlich:
• MODE = 0x0B
• SELRES = 0x1B0
• SELHYS = 0xF
• CFGABZ(7:4) = ’0000’
Systemtest
Pin Signal Beschreibung
PA A4 Offset CH1
NA A8 Phasenabweichung von 90° zwischen
CH1 und CH2
PB B4 Offset CH2
NB B8 Amplitudenabweichung zwischen
CH1 und CH2
PZ ZIn Digitales Nullsignal, unmaskiert
NZ TP1 Prüfung der Impulszahl (Linien) zwischen
zwei Nullsignalen
Lo-Signal: Prüfung aktiv (Zustand nach dem
Einschalten)
Hi-Signal: Prüfung beendet
Die Fehleranzeige an ERR wird erst nach
dem zweiten Nullsignal gültig (Freigabe
erforderlich).
Tab. 15: Digitale Kalibriersignale

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 19/39
EINGANGSKONFIGURATION
Alle Eingangsstufen sind als Instrumentenverstärker
ausgeführt und direkt für differenzielle Eingangssigna-
le geeignet. Referenz-bezogene Eingangssignale kön-
nen ebenfalls verarbeitet werden, der Eingang X2 kann
als Referenzeingang geschaltet werden. Die Auswahl
ob Strom- oder Spannungssignale verarbeitet werden
erfolgt mit RIN12 und RIN0.
INMODE Adr 0x03, bit 2
Code Funktion
0 Differenzielle Eingangssignale
1 Single-ended Eingangssignale *
Hinweis * Eingang X2 ist Referenz für alle Eingänge.
Tab. 16: Eingangssignal-Modus
Bild 2: Signalkonditionierung
Stromsignale
Im I-Modus wird an jedem Eingangspin ein Ein-
gangswiderstand Rin() aktiv, der das Stromsi-
gnal in ein Spannungssignal umwandelt. Der Ein-
gangswiderstand Rin() setzt sich aus einem Pin-
Anschlusswiderstand und dem Widerstand Rui() zu-
sammen, der an die einstellbare Vorspannungsquelle
VREFin() geschaltet ist (BIASEX muss auf ’00’ gesetzt
sein). Die nebenstehende Tabelle zeigt die Wahlmög-
lichkeiten; Rin() gibt den typischerweise resultierenden
Eingangswiderstand an (siehe El. Kenndaten für Tole-
ranzangaben). Der Eingangswiderstand sollte so ein-
gestellt werden, dass sich Mittenpotentiale VDC1 und
VDC2 zwischen 125 mV und 250 mV ergeben (prüfbar
im Modus Calibration 2).
Spannungssignale
Im U-Modus ist ein Spannungsteiler optional wähl-
bar, der zu große Eingangsamplituden auf ca. 25 %
reduziert. Die Schaltung entspricht der Widerstands-
kette im I-Modus, deutlich vergrößert wird hier der
Pin-Anschlusswiderstand. Für Sensoren, deren Offset-
Kalibrierung proportional zu einer externen DC-
Spannungsquelle erfolgen soll, ist über BIASEX die
Referenzquelle wählbar (für alle anderen Sensoren ist
BIASEX auf ’00’ zu setzen).
RIN12 Adr 0x0E, bit 3:0
RIN0 Adr 0x13, bit 3:0
Code Nominal Rin() Intern Rui() I/U Mode
–000 1.7 kΩ 1.6 kΩ Stromeingang
–010 2.5 kΩ 2.3 kΩ Stromeingang
–100 3.5 kΩ 3.2 kΩ Stromeingang
–110 4.9 kΩ 4.6 kΩ Stromeingang
1—1 20 kΩ 5 kΩ Spannungsein-
gang
0—1 hochohmig 1 MΩ Spannungsein-
gang
Tab. 17: I/U Modus und Eingangswiderstand
BIAS12 Adr 0x0E, bit 6
BIAS0 Adr 0x13, bit 6
Code VREFin() Sensortyp
0 2.5 V Lowside Stomsenke (I Mode)
1 1.5 V Highside Stromquelle (I Mode)
Hinweis Gültig ausser für BIASEX=11
Tab. 18: Referenzspannung
BIASEX Adr 0x0D, bit 7:6
Code VREFin() Signal an X2
00* 1.5 / 2.5 V
(intern)
Neg. Nullsignal (Index -), Eingang
10 1.5 / 2.5 V
(intern)
Referenzspg. VREFin12, Ausgang
11 extern Spannung an X2 wird zu VREFin
Tab. 19: Eingangsseitige Referenzauswahl
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 20/39
SIGNALPFAD-MULTIPLEXER
1
X3
X4
VDC2
PCH1o
VREFin0
X1
NCH2i
PCH1i
Calibration
VDC2
MUX_OUT
NCH1i
PCH2i
NS_out
PS_out
0 +PZO
NZO
NCH1o
VREFin12
X5
X6
VDC1
NC_out
VDC1
+
-
+
-MUXIN(1)
MUXIN(0)
INMODE
NCH0oZIN
X2
-
PC_outPCH2o
NCH2o
INVZ1
0
0
MUXIN(1)
-+
0
1
NCH0i
PCH0i PCH0o
MUX_IN
1
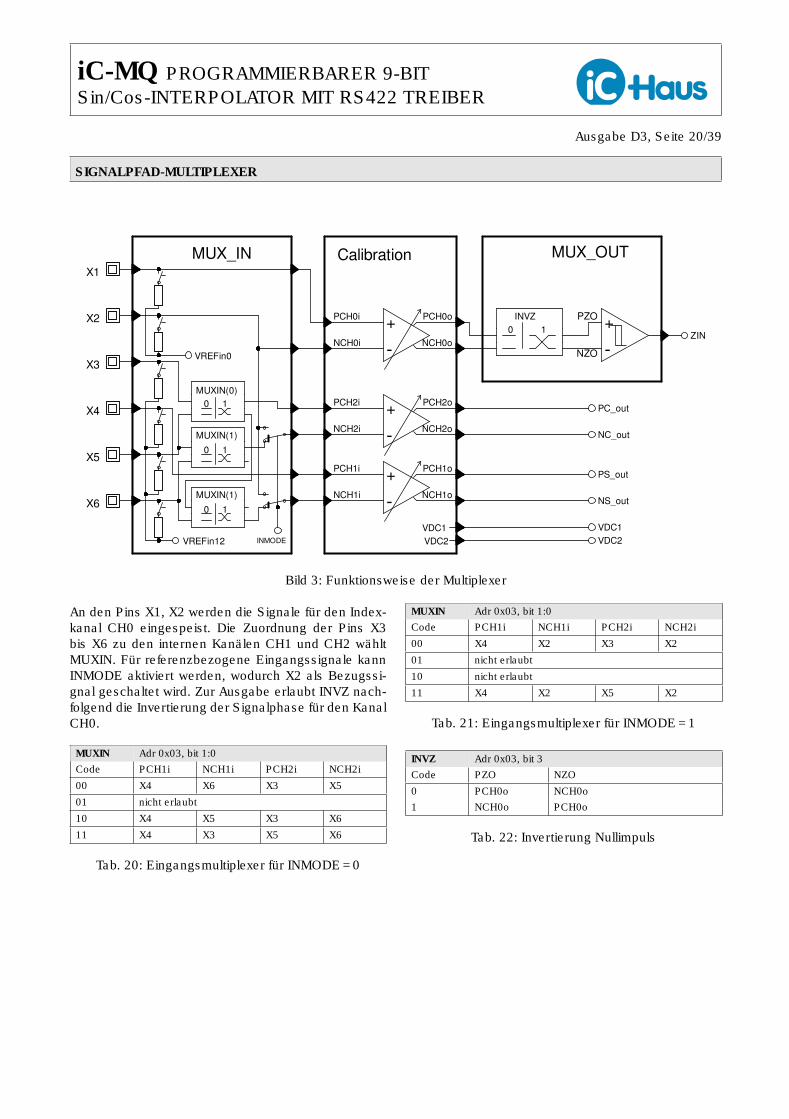
Bild 3: Funktionsweise der Multiplexer
An den Pins X1, X2 werden die Signale für den Index-
kanal CH0 eingespeist. Die Zuordnung der Pins X3
bis X6 zu den internen Kanälen CH1 und CH2 wählt
MUXIN. Für referenzbezogene Eingangssignale kann
INMODE aktiviert werden, wodurch X2 als Bezugssi-
gnal geschaltet wird. Zur Ausgabe erlaubt INVZ nach-
folgend die Invertierung der Signalphase für den Kanal
CH0.
MUXIN Adr 0x03, bit 1:0
Code PCH1i NCH1i PCH2i NCH2i
00 X4 X6 X3 X5
01 nicht erlaubt
10 X4 X5 X3 X6
11 X4 X3 X5 X6
Tab. 20: Eingangsmultiplexer für INMODE = 0
MUXIN Adr 0x03, bit 1:0
Code PCH1i NCH1i PCH2i NCH2i
00 X4 X2 X3 X2
01 nicht erlaubt
10 nicht erlaubt
11 X4 X2 X5 X2
Tab. 21: Eingangsmultiplexer für INMODE = 1
INVZ Adr 0x03, bit 3
Code PZO NZO
0 PCH0o NCH0o
1 NCH0o PCH0o
Tab. 22: Invertierung Nullimpuls
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 21/39
SIGNALKONDITIONIERUNG CH1, CH2
Die für den Abgleich der Sinus-Signale benötigten
analogen Spannungssignale können in der Betriebs-
art Calibration 2 gemessen werden. Alternativ ste-
hen charakteristische digitale Testsignale für Offset-,
Amplituden- und Phasenfehler in der Betriebsart Sys-
temtest zur Verfügung.
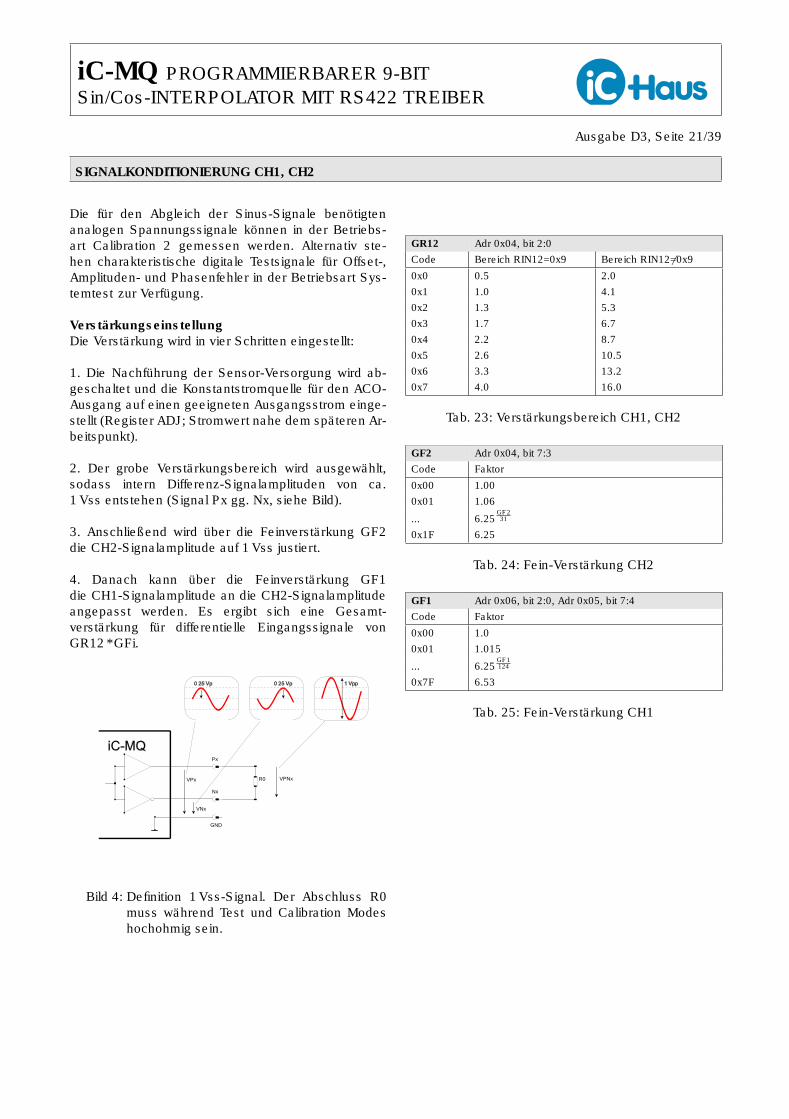
Verstärkungseinstellung
Die Verstärkung wird in vier Schritten eingestellt:
1. Die Nachführung der Sensor-Versorgung wird ab-
geschaltet und die Konstantstromquelle für den ACO-
Ausgang auf einen geeigneten Ausgangsstrom einge-
stellt (Register ADJ; Stromwert nahe dem späteren Ar-
beitspunkt).
2. Der grobe Verstärkungsbereich wird ausgewählt,
sodass intern Differenz-Signalamplituden von ca.
1 Vss entstehen (Signal Px gg. Nx, siehe Bild).
3. Anschließend wird über die Feinverstärkung GF2
die CH2-Signalamplitude auf 1 Vss justiert.
4. Danach kann über die Feinverstärkung GF1
die CH1-Signalamplitude an die CH2-Signalamplitude
angepasst werden. Es ergibt sich eine Gesamt-
verstärkung für differentielle Eingangssignale von
GR12 * GFi.
R0
Nx
GND
Px
VNx
VPx VPNx
Bild 4: Definition 1 Vss-Signal. Der Abschluss R0
muss während Test und Calibration Modes
hochohmig sein.
GR12 Adr 0x04, bit 2:0
Code Bereich RIN12=0x9 Bereich RIN12 6=0x9
0x0 0.5 2.0
0x1 1.0 4.1
0x2 1.3 5.3
0x3 1.7 6.7
0x4 2.2 8.7
0x5 2.6 10.5
0x6 3.3 13.2
0x7 4.0 16.0
Tab. 23: Verstärkungsbereich CH1, CH2
GF2 Adr 0x04, bit 7:3
Code Faktor
0x00 1.00
0x01 1.06
... 6.25GF231
0x1F 6.25
Tab. 24: Fein-Verstärkung CH2
GF1 Adr 0x06, bit 2:0, Adr 0x05, bit 7:4
Code Faktor
0x00 1.0
0x01 1.015
... 6.25GF1124
0x7F 6.53
Tab. 25: Fein-Verstärkung CH1
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 22/39
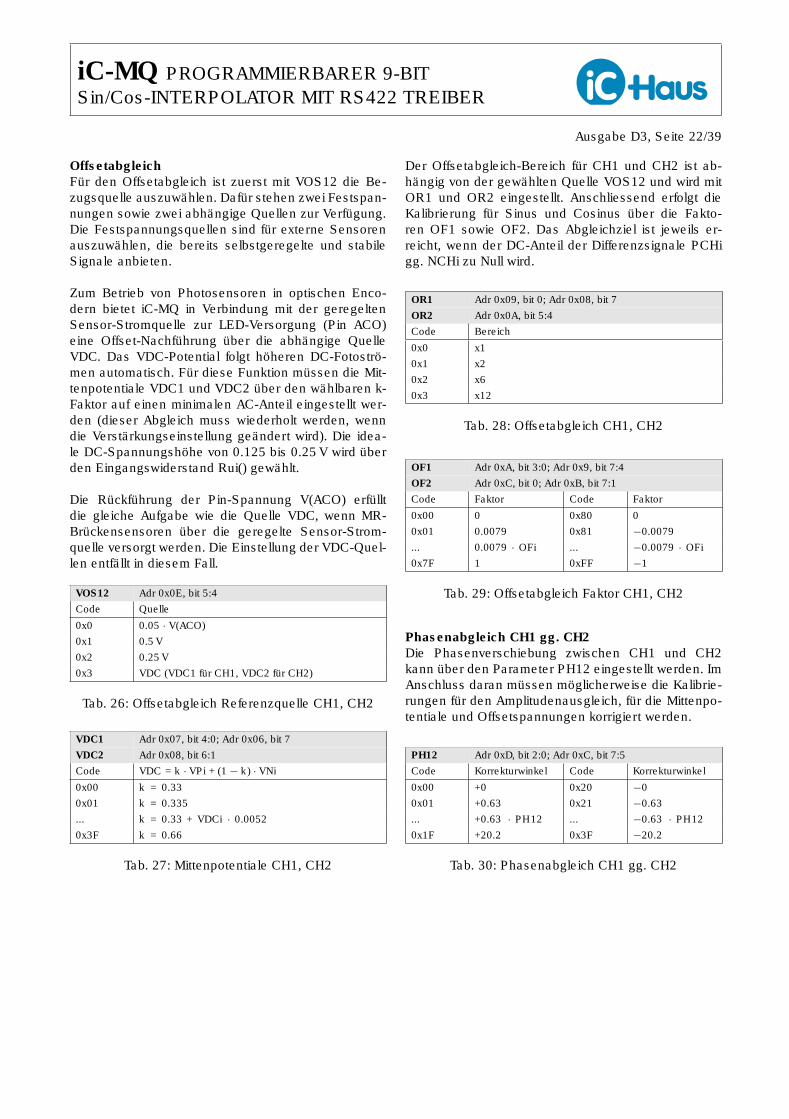
Offsetabgleich
Für den Offsetabgleich ist zuerst mit VOS12 die Be-
zugsquelle auszuwählen. Dafür stehen zwei Festspan-
nungen sowie zwei abhängige Quellen zur Verfügung.
Die Festspannungsquellen sind für externe Sensoren
auszuwählen, die bereits selbstgeregelte und stabile
Signale anbieten.
Zum Betrieb von Photosensoren in optischen Enco-
dern bietet iC-MQ in Verbindung mit der geregelten
Sensor-Stromquelle zur LED-Versorgung (Pin ACO)
eine Offset-Nachführung über die abhängige Quelle
VDC. Das VDC-Potential folgt höheren DC-Fotoströ-
men automatisch. Für diese Funktion müssen die Mit-
tenpotentiale VDC1 und VDC2 über den wählbaren k-
Faktor auf einen minimalen AC-Anteil eingestellt wer-
den (dieser Abgleich muss wiederholt werden, wenn
die Verstärkungseinstellung geändert wird). Die idea-
le DC-Spannungshöhe von 0.125 bis 0.25 V wird über
den Eingangswiderstand Rui() gewählt.
Die Rückführung der Pin-Spannung V(ACO) erfüllt
die gleiche Aufgabe wie die Quelle VDC, wenn MR-
Brückensensoren über die geregelte Sensor-Strom-
quelle versorgt werden. Die Einstellung der VDC-Quel-
len entfällt in diesem Fall.
VOS12 Adr 0x0E, bit 5:4
Code Quelle
0x0 0.05 · V(ACO)
0x1 0.5 V
0x2 0.25 V
0x3 VDC (VDC1 für CH1, VDC2 für CH2)
Tab. 26: Offsetabgleich Referenzquelle CH1, CH2
VDC1 Adr 0x07, bit 4:0; Adr 0x06, bit 7
VDC2 Adr 0x08, bit 6:1
Code VDC = k · VPi + (1− k ) · VNi
0x00 k = 0.33
0x01 k = 0.335
... k = 0.33 + VDCi · 0.0052
0x3F k = 0.66
Tab. 27: Mittenpotentiale CH1, CH2
Der Offsetabgleich-Bereich für CH1 und CH2 ist ab-
hängig von der gewählten Quelle VOS12 und wird mit
OR1 und OR2 eingestellt. Anschliessend erfolgt die
Kalibrierung für Sinus und Cosinus über die Fakto-
ren OF1 sowie OF2. Das Abgleichziel ist jeweils er-
reicht, wenn der DC-Anteil der Differenzsignale PCHi
gg. NCHi zu Null wird.
OR1 Adr 0x09, bit 0; Adr 0x08, bit 7
OR2 Adr 0x0A, bit 5:4
Code Bereich
0x0 x1
0x1 x2
0x2 x6
0x3 x12
Tab. 28: Offsetabgleich CH1, CH2
OF1 Adr 0xA, bit 3:0; Adr 0x9, bit 7:4
OF2 Adr 0xC, bit 0; Adr 0xB, bit 7:1
Code Faktor Code Faktor
0x00 0 0x80 0
0x01 0.0079 0x81 −0.0079
... 0.0079 · OFi ... −0.0079 · OFi
0x7F 1 0xFF −1
Tab. 29: Offsetabgleich Faktor CH1, CH2
Phasenabgleich CH1 gg. CH2
Die Phasenverschiebung zwischen CH1 und CH2
kann über den Parameter PH12 eingestellt werden. Im
Anschluss daran müssen möglicherweise die Kalibrie-
rungen für den Amplitudenausgleich, für die Mittenpo-
tentiale und Offsetspannungen korrigiert werden.
PH12 Adr 0xD, bit 2:0; Adr 0xC, bit 7:5
Code Korrekturwinkel Code Korrekturwinkel
0x00 +0 0x20 −0
0x01 +0.63 0x21 −0.63
... +0.63 · PH12 ... −0.63 · PH12
0x1F +20.2 0x3F −20.2
Tab. 30: Phasenabgleich CH1 gg. CH2
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 23/39
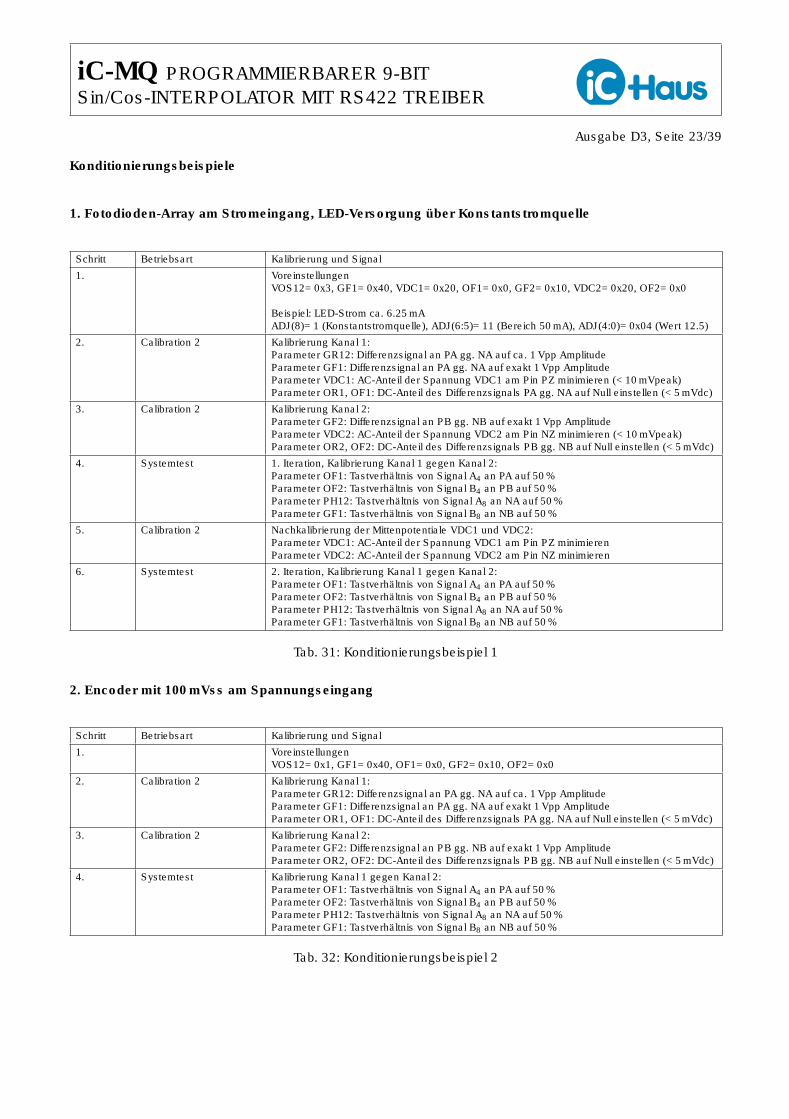
Konditionierungsbeispiele
1. Fotodioden-Array am Stromeingang, LED-Versorgung über Konstantstromquelle
Schritt Betriebsart Kalibrierung und Signal
1. Voreinstellungen
VOS12= 0x3, GF1= 0x40, VDC1= 0x20, OF1= 0x0, GF2= 0x10, VDC2= 0x20, OF2= 0x0
Beispiel: LED-Strom ca. 6.25 mA
ADJ(8)= 1 (Konstantstromquelle), ADJ(6:5)= 11 (Bereich 50 mA), ADJ(4:0)= 0x04 (Wert 12.5)
2. Calibration 2 Kalibrierung Kanal 1:
Parameter GR12: Differenzsignal an PA gg. NA auf ca. 1 Vpp Amplitude
Parameter GF1: Differenzsignal an PA gg. NA auf exakt 1 Vpp Amplitude
Parameter VDC1: AC-Anteil der Spannung VDC1 am Pin PZ minimieren (< 10 mVpeak)
Parameter OR1, OF1: DC-Anteil des Differenzsignals PA gg. NA auf Null einstellen (< 5 mVdc)
3. Calibration 2 Kalibrierung Kanal 2:
Parameter GF2: Differenzsignal an PB gg. NB auf exakt 1 Vpp Amplitude
Parameter VDC2: AC-Anteil der Spannung VDC2 am Pin NZ minimieren (< 10 mVpeak)
Parameter OR2, OF2: DC-Anteil des Differenzsignals PB gg. NB auf Null einstellen (< 5 mVdc)
4. Systemtest 1. Iteration, Kalibrierung Kanal 1 gegen Kanal 2:
Parameter OF1: Tastverhältnis von Signal A4 an PA auf 50 %
Parameter OF2: Tastverhältnis von Signal B4 an PB auf 50 %
Parameter PH12: Tastverhältnis von Signal A8 an NA auf 50 %
Parameter GF1: Tastverhältnis von Signal B8 an NB auf 50 %
5. Calibration 2 Nachkalibrierung der Mittenpotentiale VDC1 und VDC2:
Parameter VDC1: AC-Anteil der Spannung VDC1 am Pin PZ minimieren
Parameter VDC2: AC-Anteil der Spannung VDC2 am Pin NZ minimieren
6. Systemtest 2. Iteration, Kalibrierung Kanal 1 gegen Kanal 2:
Parameter OF1: Tastverhältnis von Signal A4 an PA auf 50 %
Parameter OF2: Tastverhältnis von Signal B4 an PB auf 50 %
Parameter PH12: Tastverhältnis von Signal A8 an NA auf 50 %
Parameter GF1: Tastverhältnis von Signal B8 an NB auf 50 %
Tab. 31: Konditionierungsbeispiel 1
2. Encoder mit 100 mVss am Spannungseingang
Schritt Betriebsart Kalibrierung und Signal
1. Voreinstellungen
VOS12= 0x1, GF1= 0x40, OF1= 0x0, GF2= 0x10, OF2= 0x0
2. Calibration 2 Kalibrierung Kanal 1:
Parameter GR12: Differenzsignal an PA gg. NA auf ca. 1 Vpp Amplitude
Parameter GF1: Differenzsignal an PA gg. NA auf exakt 1 Vpp Amplitude
Parameter OR1, OF1: DC-Anteil des Differenzsignals PA gg. NA auf Null einstellen (< 5 mVdc)
3. Calibration 2 Kalibrierung Kanal 2:
Parameter GF2: Differenzsignal an PB gg. NB auf exakt 1 Vpp Amplitude
Parameter OR2, OF2: DC-Anteil des Differenzsignals PB gg. NB auf Null einstellen (< 5 mVdc)
4. Systemtest Kalibrierung Kanal 1 gegen Kanal 2:
Parameter OF1: Tastverhältnis von Signal A4 an PA auf 50 %
Parameter OF2: Tastverhältnis von Signal B4 an PB auf 50 %
Parameter PH12: Tastverhältnis von Signal A8 an NA auf 50 %
Parameter GF1: Tastverhältnis von Signal B8 an NB auf 50 %
Tab. 32: Konditionierungsbeispiel 2
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 24/39
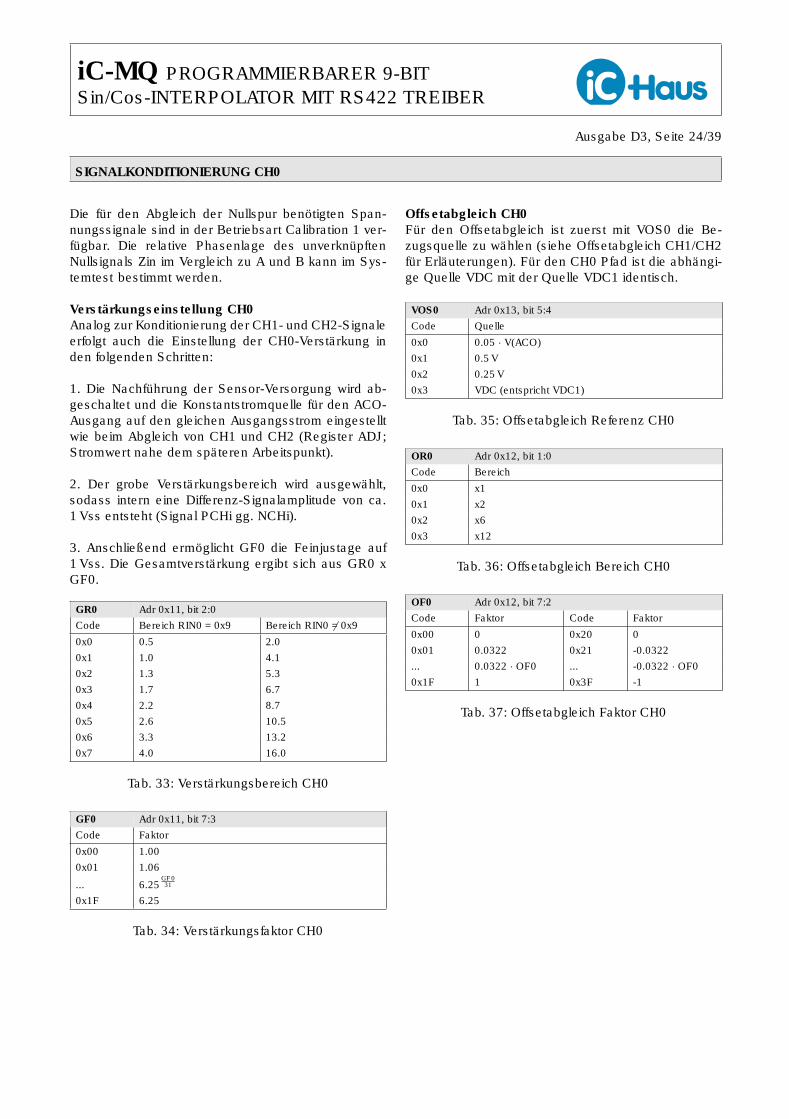
SIGNALKONDITIONIERUNG CH0
Die für den Abgleich der Nullspur benötigten Span-
nungssignale sind in der Betriebsart Calibration 1 ver-
fügbar. Die relative Phasenlage des unverknüpften
Nullsignals Zin im Vergleich zu A und B kann im Sys-
temtest bestimmt werden.
Verstärkungseinstellung CH0
Analog zur Konditionierung der CH1- und CH2-Signale
erfolgt auch die Einstellung der CH0-Verstärkung in
den folgenden Schritten:
1. Die Nachführung der Sensor-Versorgung wird ab-
geschaltet und die Konstantstromquelle für den ACO-
Ausgang auf den gleichen Ausgangsstrom eingestellt
wie beim Abgleich von CH1 und CH2 (Register ADJ;
Stromwert nahe dem späteren Arbeitspunkt).
2. Der grobe Verstärkungsbereich wird ausgewählt,
sodass intern eine Differenz-Signalamplitude von ca.
1 Vss entsteht (Signal PCHi gg. NCHi).
3. Anschließend ermöglicht GF0 die Feinjustage auf
1 Vss. Die Gesamtverstärkung ergibt sich aus GR0 x
GF0.
GR0 Adr 0x11, bit 2:0
Code Bereich RIN0 = 0x9 Bereich RIN0 6= 0x9
0x0 0.5 2.0
0x1 1.0 4.1
0x2 1.3 5.3
0x3 1.7 6.7
0x4 2.2 8.7
0x5 2.6 10.5
0x6 3.3 13.2
0x7 4.0 16.0
Tab. 33: Verstärkungsbereich CH0
GF0 Adr 0x11, bit 7:3
Code Faktor
0x00 1.00
0x01 1.06
... 6.25GF031
0x1F 6.25
Tab. 34: Verstärkungsfaktor CH0
Offsetabgleich CH0
Für den Offsetabgleich ist zuerst mit VOS0 die Be-
zugsquelle zu wählen (siehe Offsetabgleich CH1/CH2
für Erläuterungen). Für den CH0 Pfad ist die abhängi-
ge Quelle VDC mit der Quelle VDC1 identisch.
VOS0 Adr 0x13, bit 5:4
Code Quelle
0x0 0.05 · V(ACO)
0x1 0.5 V
0x2 0.25 V
0x3 VDC (entspricht VDC1)
Tab. 35: Offsetabgleich Referenz CH0
OR0 Adr 0x12, bit 1:0
Code Bereich
0x0 x1
0x1 x2
0x2 x6
0x3 x12
Tab. 36: Offsetabgleich Bereich CH0
OF0 Adr 0x12, bit 7:2
Code Faktor Code Faktor
0x00 0 0x20 0
0x01 0.0322 0x21 -0.0322
... 0.0322 · OF0 ... -0.0322 · OF0
0x1F 1 0x3F -1
Tab. 37: Offsetabgleich Faktor CH0
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 25/39
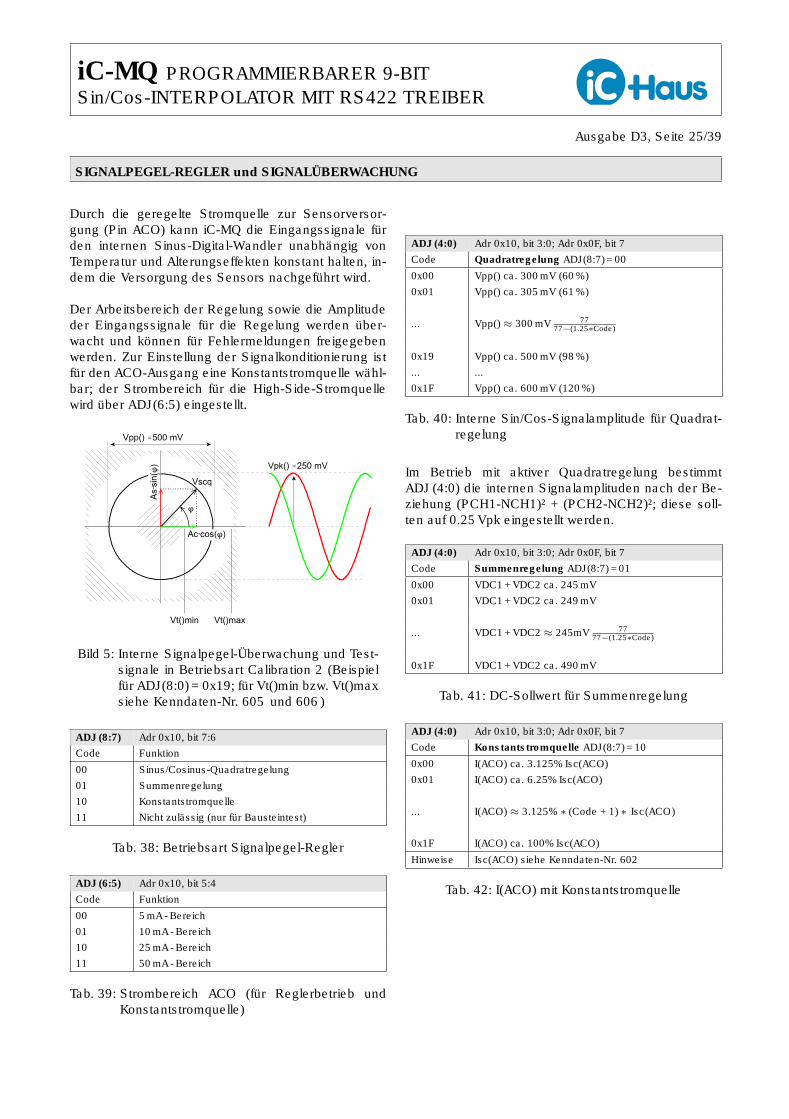
SIGNALPEGEL-REGLER und SIGNALÜBERWACHUNG
Durch die geregelte Stromquelle zur Sensorversor-
gung (Pin ACO) kann iC-MQ die Eingangssignale für
den internen Sinus-Digital-Wandler unabhängig von
Temperatur und Alterungseffekten konstant halten, in-
dem die Versorgung des Sensors nachgeführt wird.
Der Arbeitsbereich der Regelung sowie die Amplitude
der Eingangssignale für die Regelung werden über-
wacht und können für Fehlermeldungen freigegeben
werden. Zur Einstellung der Signalkonditionierung ist
für den ACO-Ausgang eine Konstantstromquelle wähl-
bar; der Strombereich für die High-Side-Stromquelle
wird über ADJ(6:5) eingestellt.
Bild 5: Interne Signalpegel-Überwachung und Test-
signale in Betriebsart Calibration 2 (Beispiel
für ADJ(8:0) = 0x19; für Vt()min bzw. Vt()max
siehe Kenndaten-Nr. 605 und 606 )
ADJ (8:7) Adr 0x10, bit 7:6
Code Funktion
00 Sinus/Cosinus-Quadratregelung
01 Summenregelung
10 Konstantstromquelle
11 Nicht zulässig (nur für Bausteintest)
Tab. 38: Betriebsart Signalpegel-Regler
ADJ (6:5) Adr 0x10, bit 5:4
Code Funktion
00 5 mA - Bereich
01 10 mA - Bereich
10 25 mA - Bereich
11 50 mA - Bereich
Tab. 39: Strombereich ACO (für Reglerbetrieb und
Konstantstromquelle)
ADJ (4:0) Adr 0x10, bit 3:0; Adr 0x0F, bit 7
Code Quadratregelung ADJ(8:7) = 00
0x00 Vpp() ca. 300 mV (60 %)
0x01 Vpp() ca. 305 mV (61 %)
... Vpp() ≈ 300 mV 7777−(1.25∗Code)
0x19 Vpp() ca. 500 mV (98 %)
... ...
0x1F Vpp() ca. 600 mV (120 %)
Tab. 40: Interne Sin/Cos-Signalamplitude für Quadrat-
regelung
Im Betrieb mit aktiver Quadratregelung bestimmt
ADJ (4:0) die internen Signalamplituden nach der Be-
ziehung (PCH1-NCH1)² + (PCH2-NCH2)²; diese soll-
ten auf 0.25 Vpk eingestellt werden.
ADJ (4:0) Adr 0x10, bit 3:0; Adr 0x0F, bit 7
Code Summenregelung ADJ(8:7) = 01
0x00 VDC1 + VDC2 ca. 245 mV
0x01 VDC1 + VDC2 ca. 249 mV
... VDC1 + VDC2 ≈ 245mV 7777−(1.25∗Code)
0x1F VDC1 + VDC2 ca. 490 mV
Tab. 41: DC-Sollwert für Summenregelung
ADJ (4:0) Adr 0x10, bit 3:0; Adr 0x0F, bit 7
Code Konstantstromquelle ADJ(8:7) = 10
0x00 I(ACO) ca. 3.125% Isc(ACO)
0x01 I(ACO) ca. 6.25% Isc(ACO)
... I(ACO) ≈ 3.125% ∗ (Code + 1) ∗ Isc(ACO)
0x1F I(ACO) ca. 100% Isc(ACO)
Hinweise Isc(ACO) siehe Kenndaten-Nr. 602
Tab. 42: I(ACO) mit Konstantstromquelle

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 26/39
SINUS-DIGITAL-WANDLUNG
SELRES Adr 0x1C, bit 6:0; Adr 0x1B, bit 7:0
Wert STEP
Winkelschritte
pro Periode
IPF
Interpolations-
faktor
fin()max
Zulässige Ein-
gangsfrequenz
(MTD=0x8)
0x00E0 4 1 200 kHz
0x01B0 8 2 200 kHz
0x02A0 12 3 200 kHz
0x0398 16 4 200 kHz
0x0414 20 5 200 kHz
0x0590 24 6 166 kHz
0x078C 32 8 125 kHz
0x090A 40 10 100 kHz
0x0B88 48 12 83 kHz
0x0F86 64 16 62.5 kHz
0x1305 80 20 50 kHz
0x1784 96 24 40 kHz
0x1804 100 25 40 kHz
0x1F83 128 32 30 kHz
0x2F82 192 48 20 kHz
0x3102 200 50 20 kHz
0x5F81 384 96 10 kHz
0x6301 400 100 10 kHz
Tab. 43: Wandlerauflösung
Die Wandlerauflösung von iC-MQ ist mit SELRES ein-
stellbar. Für eine Auflösung von 4 werden vier Flan-
ken pro Eingangssignalperiode erzeugt, so dass die
Schaltfrequenz am A- und B-Ausgang der Sinusfre-
quenz am Eingang entspricht.
Die programmierbare Wandlerhysterese wird durch
SELHYS bestimmt. Sie wird in Vielfachen der Inkre-
mentgröße eingestellt und darf maximal 45° der Ein-
gangssignalperiode betragen.
SELHYS Adr 0x1D, bit 3:0
Code Funktion
0x0 Näherungsweise keine Hysterese
0x1 1 Inkrement (≈ 0.9°)
0x2 2 Inkremente (≈ 1.8°)
0x3-0xD 3-13 Inkremente (≈ 2.7°-11.7°)
0xE SELRES(6:1) Inkremente (0.5 LSB)
0xF* SELRES(6:0) Inkremente
Hinweise *) Nicht zulässig für SELRES = 0x00E0
Tab. 44: Kodierung der Wandlerhysterese

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 27/39
AUSGANGSEINSTELLUNGEN UND NULLSIGNAL
Der eingestellte Interpolationsfaktor IPF bestimmt die
Anzahl der intern erzeugten A/B-Signalperioden, die
zur Positionierung des Nullimpulses über POS mit-
gezählt werden. Beim Sin/Cos-Phasenwinkel von Null
Grad beginnt die A/B-Periodenzählung bei POS= 0,
die höchste Periodenzahl ist mit POSmax= IPF-1 er-
reicht. Dabei nimmt die interne A/B-Signalperiode den
folgenden Verlauf:
A 1 1 0 0
B 1 0 0 1
Tab. 45: Interne A/B-Signalperiode
Für die Ausgabe der A/B/Z-Signale sind Invertierun-
gen und Vertauschungen wählbar, sowie eine beliebi-
ge logische Verknüpfung für die Ausgabe des Nullsi-
gnals. Die Ausgabelogik fasst der Parameter CFGABZ
gemäß der folgenden Tabelle zusammen.
CFGABZ Adr 0x19, bit 7:0
Bit Funktion und Beschreibung
7 Ausgangsinvertierung A-Kanal: PA<>NA
PA = P1i xor CFGABZ(7)
6 Ausgansgsinvertierung B-Kanal: PB<>NB
PB = P2i xor CFGABZ(6)
5 Ausgangsinvertierung Nullsignal: PZ<>NZ
PZ = P0i xor CFGABZ(5)
4 Vertauschung der A/B-Signalzuordnung
0: P1i = A, P2i = B
1: P1i = B, P2i = A
Nullsignal-Logik CFGABZ(3:0)
3 Freigabe für A = 1, B = 1
2 Freigabe für A = 1, B = 0
1 Freigabe für A = 0, B = 0
0 Freigabe für A = 0, B = 1
Tab. 46: Ausgabelogik
Bild 6: Signalpfad von A und B zu PA/NA und PB/NB
Nullsignal-Erzeugung
Die Erzeugung des Nullsignals ist abhängig vom in-
ternen Freigabesignal ZIn, das durch Komparation der
aufbereiteten X1- und X2-Eingangssignale entsteht.
Die Offset-Kalibrierung von CH0 beinflusst die Breite
des Freigabesignals, sodass vor der Einstellung der
Nullsignal-Logik die korrekte Lage von ZIn überprüft
werden sollte. Dies ist im Mode ABZ am Fehlersignal-
ausgang (Pin ERR) möglich (erforderliche Einstellun-
gen: EMASKA= 0x010, EMTD=0x0).
Bild 7: Signalpfad von ZIn zu PZ/NZ
Die Positionierung des Nullsignals durch CFGZPOS
erfolgt relativ zur internen A/B-Periodenzahl POS. Es
muss eine Periode ausgewählt werden, die möglichst
mittig vom Freigabesignal ZIn überdeckt wird. Für Pe-
riodenzahlen die aufgrund eines kleineren Interpolati-
onsfaktors nicht erreicht werden können, entsteht kein
Nullsignal.
CFGZPOS Adr 0x1A, bit 7:0
Bit Beschreibung
7 Maskierungsfreigabe
(Nullsignal-Position durch POS bestimmt)
(6:0) POS = A/B-Signalperiode
(Freigabe der Nullsignalausgabe)
Tab. 47: Nullsignal-Positionierung
ENZFF Adr 0x02, bit 4
Bit Beschreibung
0 Nullsignal-Ausgabe mit Zustandswechsel von P0i
1 Nullsignal-Ausgabe synchron mit A/B-Signal
Tab. 48: Nullsignal-Synchronisation
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 28/39
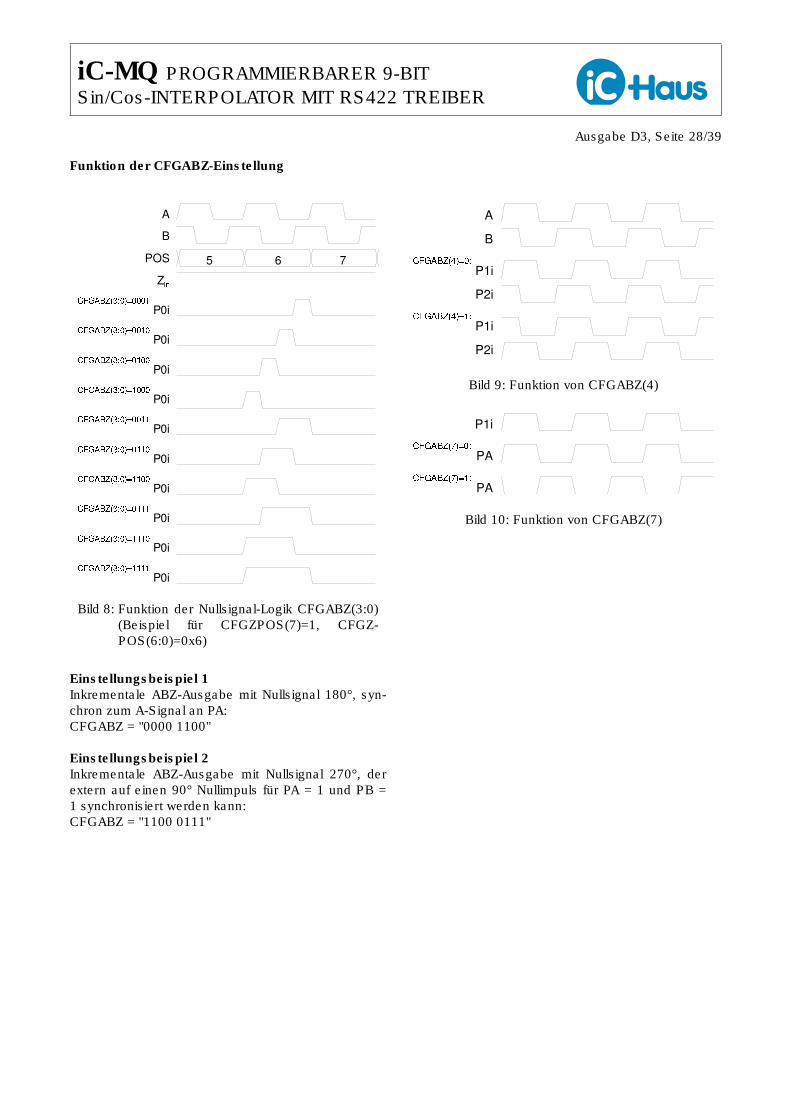
Funktion der CFGABZ-Einstellung
Bild 8: Funktion der Nullsignal-Logik CFGABZ(3:0)
(Beispiel für CFGZPOS(7)=1, CFGZ-
POS(6:0)=0x6)
Einstellungsbeispiel 1
Inkrementale ABZ-Ausgabe mit Nullsignal 180°, syn-
chron zum A-Signal an PA:
CFGABZ = "0000 1100"
Einstellungsbeispiel 2
Inkrementale ABZ-Ausgabe mit Nullsignal 270°, der
extern auf einen 90° Nullimpuls für PA = 1 und PB =
1 synchronisiert werden kann:
CFGABZ = "1100 0111"
Bild 9: Funktion von CFGABZ(4)
Bild 10: Funktion von CFGABZ(7)
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 29/39
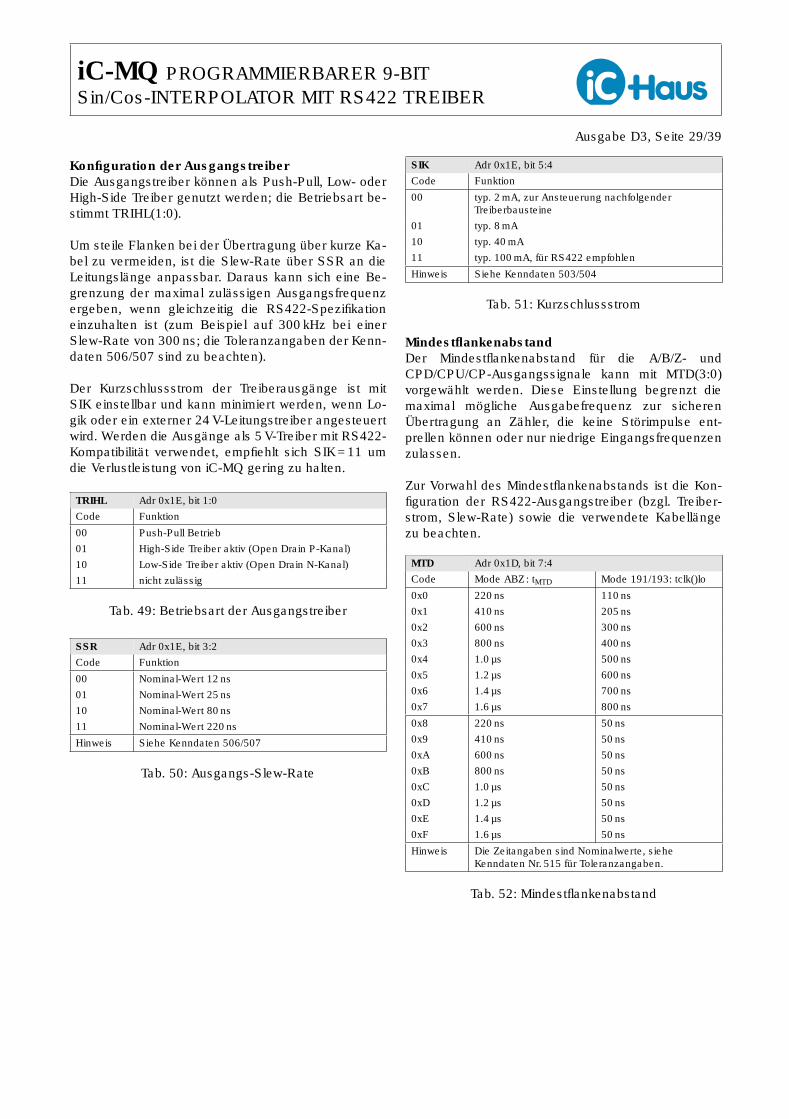
Konfiguration der Ausgangstreiber
Die Ausgangstreiber können als Push-Pull, Low- oder
High-Side Treiber genutzt werden; die Betriebsart be-
stimmt TRIHL(1:0).
Um steile Flanken bei der Übertragung über kurze Ka-
bel zu vermeiden, ist die Slew-Rate über SSR an die
Leitungslänge anpassbar. Daraus kann sich eine Be-
grenzung der maximal zulässigen Ausgangsfrequenz
ergeben, wenn gleichzeitig die RS422-Spezifikation
einzuhalten ist (zum Beispiel auf 300 kHz bei einer
Slew-Rate von 300 ns; die Toleranzangaben der Kenn-
daten 506/507 sind zu beachten).
Der Kurzschlussstrom der Treiberausgänge ist mit
SIK einstellbar und kann minimiert werden, wenn Lo-
gik oder ein externer 24 V-Leitungstreiber angesteuert
wird. Werden die Ausgänge als 5 V-Treiber mit RS422-
Kompatibilität verwendet, empfiehlt sich SIK = 11 um
die Verlustleistung von iC-MQ gering zu halten.
TRIHL Adr 0x1E, bit 1:0
Code Funktion
00 Push-Pull Betrieb
01 High-Side Treiber aktiv (Open Drain P-Kanal)
10 Low-Side Treiber aktiv (Open Drain N-Kanal)
11 nicht zulässig
Tab. 49: Betriebsart der Ausgangstreiber
SSR Adr 0x1E, bit 3:2
Code Funktion
00 Nominal-Wert 12 ns
01 Nominal-Wert 25 ns
10 Nominal-Wert 80 ns
11 Nominal-Wert 220 ns
Hinweis Siehe Kenndaten 506/507
Tab. 50: Ausgangs-Slew-Rate
SIK Adr 0x1E, bit 5:4
Code Funktion
00 typ. 2 mA, zur Ansteuerung nachfolgender
Treiberbausteine
01 typ. 8 mA
10 typ. 40 mA
11 typ. 100 mA, für RS422 empfohlen
Hinweis Siehe Kenndaten 503/504
Tab. 51: Kurzschlussstrom
Mindestflankenabstand
Der Mindestflankenabstand für die A/B/Z- und
CPD/CPU/CP-Ausgangssignale kann mit MTD(3:0)
vorgewählt werden. Diese Einstellung begrenzt die
maximal mögliche Ausgabefrequenz zur sicheren
Übertragung an Zähler, die keine Störimpulse ent-
prellen können oder nur niedrige Eingangsfrequenzen
zulassen.
Zur Vorwahl des Mindestflankenabstands ist die Kon-
figuration der RS422-Ausgangstreiber (bzgl. Treiber-
strom, Slew-Rate) sowie die verwendete Kabellänge
zu beachten.
MTD Adr 0x1D, bit 7:4
Code Mode ABZ : tMTD Mode 191/193: tclk()lo
0x0 220 ns 110 ns
0x1 410 ns 205 ns
0x2 600 ns 300 ns
0x3 800 ns 400 ns
0x4 1.0 µs 500 ns
0x5 1.2 µs 600 ns
0x6 1.4 µs 700 ns
0x7 1.6 µs 800 ns
0x8 220 ns 50 ns
0x9 410 ns 50 ns
0xA 600 ns 50 ns
0xB 800 ns 50 ns
0xC 1.0 µs 50 ns
0xD 1.2 µs 50 ns
0xE 1.4 µs 50 ns
0xF 1.6 µs 50 ns
Hinweis Die Zeitangaben sind Nominalwerte, siehe
Kenndaten Nr. 515 für Toleranzangaben.
Tab. 52: Mindestflankenabstand
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 30/39
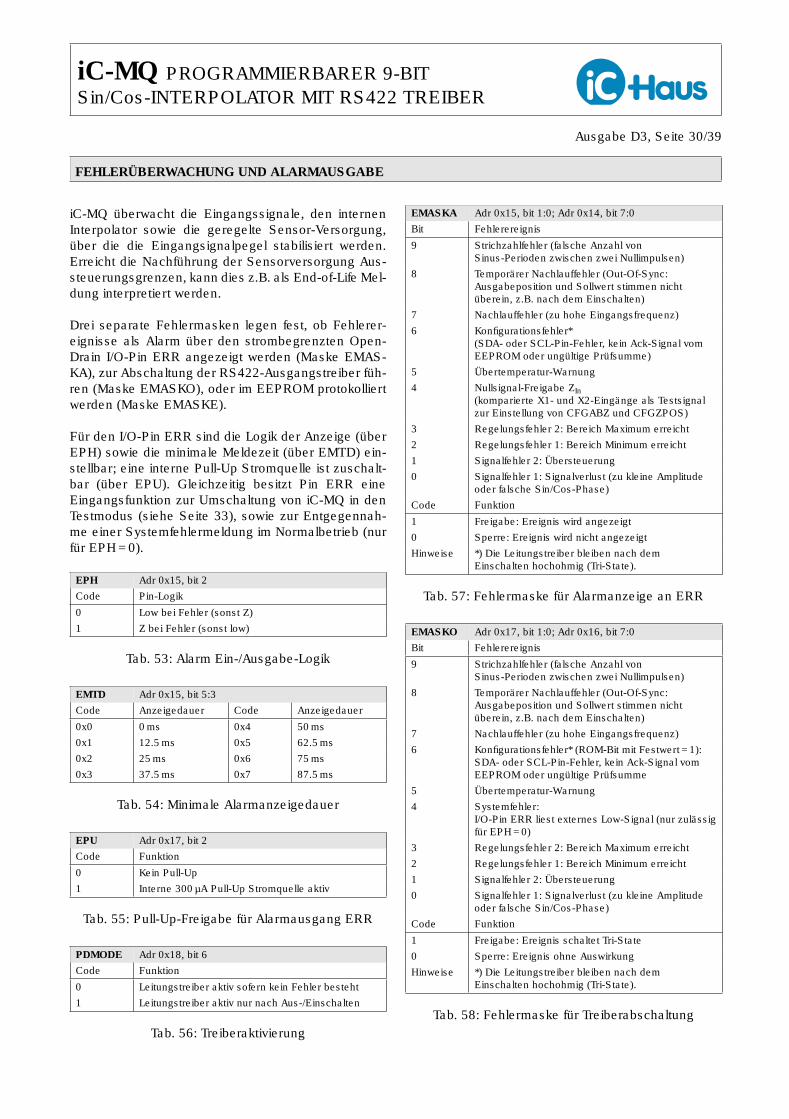
FEHLERÜBERWACHUNG UND ALARMAUSGABE
iC-MQ überwacht die Eingangssignale, den internen
Interpolator sowie die geregelte Sensor-Versorgung,
über die die Eingangsignalpegel stabilisiert werden.
Erreicht die Nachführung der Sensorversorgung Aus-
steuerungsgrenzen, kann dies z.B. als End-of-Life Mel-
dung interpretiert werden.
Drei separate Fehlermasken legen fest, ob Fehlerer-
eignisse als Alarm über den strombegrenzten Open-
Drain I/O-Pin ERR angezeigt werden (Maske EMAS-
KA), zur Abschaltung der RS422-Ausgangstreiber füh-
ren (Maske EMASKO), oder im EEPROM protokolliert
werden (Maske EMASKE).
Für den I/O-Pin ERR sind die Logik der Anzeige (über
EPH) sowie die minimale Meldezeit (über EMTD) ein-
stellbar; eine interne Pull-Up Stromquelle ist zuschalt-
bar (über EPU). Gleichzeitig besitzt Pin ERR eine
Eingangsfunktion zur Umschaltung von iC-MQ in den
Testmodus (siehe Seite 33), sowie zur Entgegennah-
me einer Systemfehlermeldung im Normalbetrieb (nur
für EPH = 0).
EPH Adr 0x15, bit 2
Code Pin-Logik
0 Low bei Fehler (sonst Z)
1 Z bei Fehler (sonst low)
Tab. 53: Alarm Ein-/Ausgabe-Logik
EMTD Adr 0x15, bit 5:3
Code Anzeigedauer Code Anzeigedauer
0x0 0 ms 0x4 50 ms
0x1 12.5 ms 0x5 62.5 ms
0x2 25 ms 0x6 75 ms
0x3 37.5 ms 0x7 87.5 ms
Tab. 54: Minimale Alarmanzeigedauer
EPU Adr 0x17, bit 2
Code Funktion
0 Kein Pull-Up
1 Interne 300 µA Pull-Up Stromquelle aktiv
Tab. 55: Pull-Up-Freigabe für Alarmausgang ERR
PDMODE Adr 0x18, bit 6
Code Funktion
0 Leitungstreiber aktiv sofern kein Fehler besteht
1 Leitungstreiber aktiv nur nach Aus-/Einschalten
Tab. 56: Treiberaktivierung
EMASKA Adr 0x15, bit 1:0; Adr 0x14, bit 7:0
Bit Fehlerereignis
9 Strichzahlfehler (falsche Anzahl von
Sinus-Perioden zwischen zwei Nullimpulsen)
8 Temporärer Nachlauffehler (Out-Of-Sync:
Ausgabeposition und Sollwert stimmen nicht
überein, z.B. nach dem Einschalten)
7 Nachlauffehler (zu hohe Eingangsfrequenz)
6 Konfigurationsfehler*
(SDA- oder SCL-Pin-Fehler, kein Ack-Signal vom
EEPROM oder ungültige Prüfsumme)
5 Übertemperatur-Warnung
4 Nullsignal-Freigabe ZIn
(komparierte X1- und X2-Eingänge als Testsignal
zur Einstellung von CFGABZ und CFGZPOS)
3 Regelungsfehler 2: Bereich Maximum erreicht
2 Regelungsfehler 1: Bereich Minimum erreicht
1 Signalfehler 2: Übersteuerung
0 Signalfehler 1: Signalverlust (zu kleine Amplitude
oder falsche Sin/Cos-Phase)
Code Funktion
1 Freigabe: Ereignis wird angezeigt
0 Sperre: Ereignis wird nicht angezeigt
Hinweise *) Die Leitungstreiber bleiben nach dem
Einschalten hochohmig (Tri-State).
Tab. 57: Fehlermaske für Alarmanzeige an ERR
EMASKO Adr 0x17, bit 1:0; Adr 0x16, bit 7:0
Bit Fehlerereignis
9 Strichzahlfehler (falsche Anzahl von
Sinus-Perioden zwischen zwei Nullimpulsen)
8 Temporärer Nachlauffehler (Out-Of-Sync:
Ausgabeposition und Sollwert stimmen nicht
überein, z.B. nach dem Einschalten)
7 Nachlauffehler (zu hohe Eingangsfrequenz)
6 Konfigurationsfehler* (ROM-Bit mit Festwert = 1):
SDA- oder SCL-Pin-Fehler, kein Ack-Signal vom
EEPROM oder ungültige Prüfsumme
5 Übertemperatur-Warnung
4 Systemfehler:
I/O-Pin ERR liest externes Low-Signal (nur zulässig
für EPH = 0)
3 Regelungsfehler 2: Bereich Maximum erreicht
2 Regelungsfehler 1: Bereich Minimum erreicht
1 Signalfehler 2: Übersteuerung
0 Signalfehler 1: Signalverlust (zu kleine Amplitude
oder falsche Sin/Cos-Phase)
Code Funktion
1 Freigabe: Ereignis schaltet Tri-State
0 Sperre: Ereignis ohne Auswirkung
Hinweise *) Die Leitungstreiber bleiben nach dem
Einschalten hochohmig (Tri-State).
Tab. 58: Fehlermaske für Treiberabschaltung

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 31/39
Fehlerprotokoll
Von den mit EMASKE freigegeben Fehlermeldungen
wird sowohl der erste Fehler (unter ERR1), als auch
der letzte Fehler (unter ERR2) im EEPROM gespei-
chert, der nach der Inbetriebnahme von iC-MQ auftritt.
Ebenso enthält das EEPROM eine Speicherstelle, in
der von diesen Fehlern alle jemals aufgetretenen ge-
speichert werden können (ERR3). Gespeichert wer-
den kann nur dass der Fehler auftrat, jedoch nicht
wann oder wie oft. Die Fehlersicherung dient z.B. der
statistischen Auswertung von Ausfallursachen.
EMASKE Adr 0x18, bit 5:0; Adr 0x17, bit 7:4
Bit Fehlerereignis
9 Strichzahlfehler (falsche Anzahl von
Sinus-Perioden (zwischen zwei Nullimpulsen)
8 —
7 Nachlauffehler (zu hohe Eingangsfrequenz)
6 —
5 Übertemperatur-Warnung
4 Systemfehler
(nur zulässig für EPH = 0: I/O-Pin ERR liest
externes Low-Signal)
3 Regelungsfehler 2: Bereich Maximum erreicht
2 Regelungsfehler 1: Bereich Minimum erreicht
1 Signalfehler 2: Übersteuerung
0 Signalfehler 1: Signalverlust (Amplitude zu klein
oder falsche Sin/Cos-Phase)
Code Funktion
1 Freigabe: Ereignis wird gespeichert
0 Sperre: Ereignis wird nicht gespeichert
Tab. 59: Fehlermaske für Sicherung im EEPROM
ERR1 Adr 0x31, Bit 1:0; Adr 0x30, Bit 7:0
ERR2 Adr 0x32, Bit 3:0; Adr 0x31, Bit 7:2
ERR3 Adr 0x33, Bit 5:0; Adr 0x32, Bit 7:4
Bit Fehler-Ereignis
6:0 Zuordnung siehe EMASKE
Code Funktion
0 Kein Ereignis
1 Registriertes Fehler-Ereignis
Tab. 60: Fehler-Protokoll
Strichzahlfehler
Der Strichzahlfehler ist speziell für Drehgeber-
Systeme interessant. Die Überprüfung beginnt mit je-
dem Nullimpuls neu und zählt die Sinus-Perioden bis
zum nächsten Nullimpuls; bei Änderung der Drehrich-
tung wird die Überprüfung abgebochen.
Unter LINECNT wird nachfolgend die Strichzahl weni-
ger 1 gespeichert, d. h. für eine Codescheibe mit 256
Strichen speichert LINECNT den Wert 255. Stimmt
die gezählte Strichzahl nicht mit der bereits unter LI-
NECNT gespeicherten Zahl überein, wird der Strich-
zahlfehler gesetzt. In der Betriebart Systemtest meldet
das Signal TP1, wenn die Strichzahlprüfung erstmalig
beendet wurde.
Temperatur-Überwachung
Beim Überschreiten der Temperatur-Warnschwelle
wird eine Übertemperaturmeldung generiert, die im
Block Fehlerüberwachung verarbeitet wird (Tw ent-
spricht T2).
Das Überschreiten der Temperatur-Warnschwelle
kann über Pin ERR gemeldet werden oder zum Ab-
schalten der Leitungstreiber verwendet werden (über
die Fehlermaske EMASKO). Die Temperatur-Warnung
wird gelöscht, wenn die Temperatur unter Tw -Thys
sinkt.
Beim Überschreiten der Temperatur-Abschaltschwelle
Toff = Tw + ∆ T werden die Leitungstreiber unabhän-
gig von EMASKO abgeschaltet.

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 32/39
VERPOLUNGSSCHUTZ
iC-MQ ist gegen eine Verpolung der Versorgungsspan-
nung geschützt und hat kurzschlussfeste, fehlertole-
rante Leitungstreiber. Ein defektes Anschlusskabel der
Baugruppe oder ein falsch angeschlossenes Kabel
toleriert iC-MQ. Ebenfalls geschützt sind alle Schal-
tungsteile, die über VDDS und GNDS die überwachte
Versorgungsspannung erhalten.
Der Verpolungsschutz ist für alle folgenden Pins gege-
ben: PA, NA, PB, NB, PZ, NZ, ERR, VDD, GND, ACO.
Randbedingungen: GNDS darf nur Lastströme aus
VDDS erhalten. Die maximale Spannungsdifferenz
zwischen GNDS und einem anderen Pin darf 6 V nicht
überschreiten - wobei Pin ERR in dieser Betrachtung
ausgenommen ist (siehe Testmodus auf S. 33).

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 33/39
TESTMODUS
iC-MQ wechselt in den Testmodus, wenn am Pin ERR
eine Spannung größer als VTMon angelegt wird (Vor-
aussetzung: EMODE(0) = 1). Daraufhin sendet iC-MQ
seine Setup-Einstellung als Strom-modulierte Daten
über den Fehlersignal-I/O-Pin ERR, entweder direkt
aus dem RAM (für EMODE2 = 1), oder nach erneutem
Einlesen des EEPROMs (für EMODE2 = 0). Sinkt die
Spannung am ERR-Pin unter VTMoff wird der Testmo-
dus beendet und die Datenübertragung abgebrochen.
Den Takt für die Datenausgabe bestimmt ENFAST.
Zwei Taktzeiten sind wählbar: 780 ns für ENFAST = 1
oder 3.125 µs für ENFAST = 0 (siehe Kenndatennum-
mer B12 für Taktfrequenz und Toleranzangaben).
Die Ausgabe erfolgt in Manchester-Codierung über
zwei Takte pro Bit. Dazu wechselt die Low-Side-
Stromquelle zwischen einem Z-Zustand (OFF= 0 mA)
und einem L-Zustand (ON= 2 mA).
Die Bit-Information liegt in der Richtung des Wechsels:
Null-Bit: Zustandswechsel Z→ L (OFF nach ON)
Eins-Bit: Zustandwechsel L→ Z (ON nach OFF)
Der Übertragungsrahmen besteht aus einem Startbit
(Eins-Bit), 8 Datenbits und einer Übertragungspause
im Z-Zustand (Timing identisch mit einem EEPROM-
Zugriff über die I2C-Schnittstelle).
Beispiel: Byte-Wert = 1000 1010
Mit Startbit wird übertragen: 1 1000 1010
In Manchester-Kodierung: LZ LZZL ZLZL LZZL LZZL
Dekodierung des Datenstroms:
ZZZZZZ LZ LZ ZL ZL ZL LZ ZL LZ ZL ZZZZZZ
Pause 1 1 0 0 0 1 0 1 0 Pause
EMODE Adr 0x15, bit 7:6
Code Funktion im Testmodus Funktion nach
Beendigung des
Testmodus
00 Normalbetrieb
(unterbrechungsfrei)
Normalbetrieb
(unterbrechungsfrei)
01 Übertragung von Fehler-
und OEM-Daten*
Erneutes Auslesen des
EEPROMS
10 Normalbetrieb
(unterbrechungsfrei)
Erneutes Auslesen des
EEPROMS
11 Übertragen des
EEPROM-Inhalts
(0x0-0x7F)
Erneutes Auslesen des
EEPROMS
Hinweis *) Wählbare Adressbereiche:
EMODE2 = 0: Adressen 0x24 bis 0x7F
EMODE2 = 1: Adressen 0x3B bis 0x43
Tab. 61: Testmodus
EMODE2 Adr 0x18, bit 7
Code Registerauswahl Adressbereich für
EMODE = 01
0 EEPROM: externe
Konfigurationdaten
lesen und senden
(DEVID ist die
Bausteinadresse)
Adressbereich
0x24-0x7F
1 RAM: interne
Konfigurationsdaten
senden (ENSL = 1)
Adressbereich
0x3B-0x43
Tab. 62: Register- und Adressauswahl für Testmodus
DATA_ON
AD8029U22-S
-M21
100nF
LM393
8
R27
dra_mq1d_error_schem
-NDIS
6
max. 5V
2
GND
+
U22-A
C25
365k
+7
LM393
2K
8
U23-B
3
100nF
R22
2N7002
C21
LM393
U21LM285
R2851k
5
76
100nF
R23
AD8029
VP
C23
470
4
LL4148
5
C24M22IRLML6401
-
VP
100pF
VP
U23-ALM393
C22100nF
R28
U23-S
R27
R25
100k
R252k
100nFC26
VP
ERRJP4
C26
M212N7002
VDD
VDD
DATA_ON
2K
LM393U23-B
100k
R26
M22
LM285
2
LM393
C23
100k
R22365k
AD8029
U22-A
C24
VP
VP
475kR21
1
U22-SAD8029
U21
51k
100nF
D21
U23-S
+
VP8
R24
4
DATA_OUT
100nFC21
JP4
470
R24
R21475k
LL4148D21
100pF
C25100nF
2k
IRLML6401
VN
R26
100kR23
3
U23-A 100nF
VP
4
DATA_OUT
100nFC22
Bild 11: Schaltungsbeispiel zur Dekodierung und
Umsetzung der Stromsignale in Logikpegel.

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 34/39
Schnelle Umprogrammierung im
Single-Master-System
Für den Signalabgleich ist eine schnelle Umprogram-
mierung von iC-MQ möglich. Wird der Testmodus ver-
lassen und ist EMODE 6= 00, liest iC-MQ die Kon-
figurationsdaten erneut ein. Anstelle des Standard-
EEPROMs (DEVID 0x50) kann nun ein EEPROM mit
einer anderen Bausteinadresse eingelesen werden,
die unter DEVID (Adr 0x00; Bit 6:0) hinterlegt werden
kann.
In den Betriebsarten Mode ABZ, Systemtest und Mo-
de 191/193 wird der EEPROM-Inhalt vollständig gele-
sen. Für andere Betriebsarten ist der Adressbereich
auf 0x0-0x31 eingeschränkt, sodass sich die Konfigu-
rationszeit zur Kalibierung oder den IC-Test verkürzt.
Wird während des Einlesens in den Testmodus ge-
wechselt, wird das Einlesen abgebrochen und erst
nach Beendigung des Testmodus wiederholt.
Schnelle Umprogrammierung im
Multi-Master-System
Die schnelle, byteweise Programmierung von iC-MQ
ist mit einem multi-master-fähigen Programmiergerät
möglich. Dazu muss der integrierte I2C-Slave-Mode
über ENSL freigegeben werden und iC-MQ reagiert
nachfolgend auf die Device-ID 0x55.
Ist kein EEPROM angeschlossen, setzt iC-MQ die
I2C-Slave-Mode Freigabe automatisch (nach maximal
150 ms, siehe Kenndaten D11) und deaktiviert den Di-
gitalteil (gesetzt werden ENSL = 1 und END = 0 ). Es
können beliebig viele Bytes auf einmal geschrieben
werden, die empfangenen Daten werden direkt in die
RAM-Register übernommen. Zu beachten sind die in
nebenstehender Tabelle genannten Bedingungen. Im
Anschluss an die Programmierung muss END = 1 ge-
setzt werden, für einen Neuanlauf des Sinus-Digital-
Wandlung im gewählten Betriebsmodus.

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 35/39
APPLIKATIONSBEISPIELE
Bild 12 zeigt das Schaltbild eines optischen Enco-
ders mit inkrementaler Ausgabe der Quadratursigna-
le als RS422-kompatible Differenzsignale, die steue-
rungsseitig mit 100 Ω abgeschlossen werden können.
Der magnetische Encoder nach Bild 13 verwendet
alternativ magneto-resistive Sensorbrücken. Ein ex-
terner Überspannungsschutz kann zum Beispiel aus
TVS-Dioden zuzüglich einer PolyFuse-Sicherung in
der VDD-Zuleitung bestehen.
Disc
iC-LSHB
iC-MQ
Bild 12: Applikationsbeispiel optischer Encoder mit Überspannungsschutz
iC-MQ
Bild 13: Applikationsbeispiel magnetischer Encoder
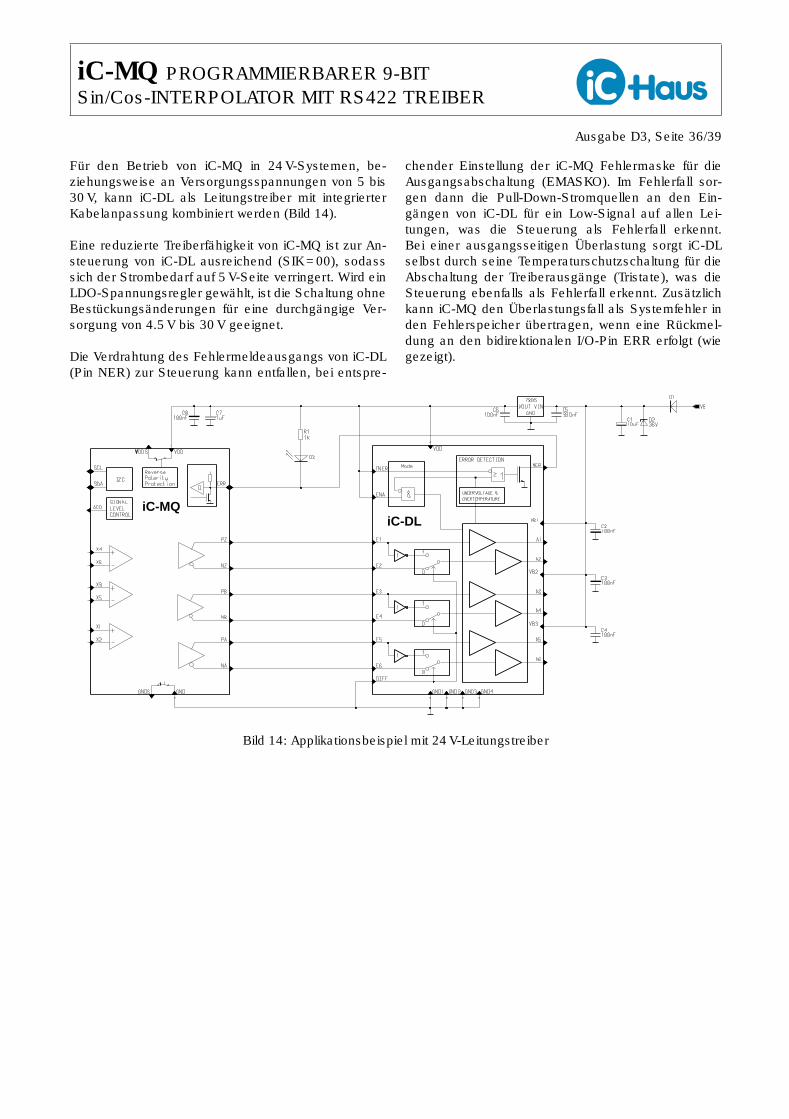
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 36/39
Für den Betrieb von iC-MQ in 24 V-Systemen, be-
ziehungsweise an Versorgungsspannungen von 5 bis
30 V, kann iC-DL als Leitungstreiber mit integrierter
Kabelanpassung kombiniert werden (Bild 14).
Eine reduzierte Treiberfähigkeit von iC-MQ ist zur An-
steuerung von iC-DL ausreichend (SIK = 00), sodass
sich der Strombedarf auf 5 V-Seite verringert. Wird ein
LDO-Spannungsregler gewählt, ist die Schaltung ohne
Bestückungsänderungen für eine durchgängige Ver-
sorgung von 4.5 V bis 30 V geeignet.
Die Verdrahtung des Fehlermeldeausgangs von iC-DL
(Pin NER) zur Steuerung kann entfallen, bei entspre-
chender Einstellung der iC-MQ Fehlermaske für die
Ausgangsabschaltung (EMASKO). Im Fehlerfall sor-
gen dann die Pull-Down-Stromquellen an den Ein-
gängen von iC-DL für ein Low-Signal auf allen Lei-
tungen, was die Steuerung als Fehlerfall erkennt.
Bei einer ausgangsseitigen Überlastung sorgt iC-DL
selbst durch seine Temperaturschutzschaltung für die
Abschaltung der Treiberausgänge (Tristate), was die
Steuerung ebenfalls als Fehlerfall erkennt. Zusätzlich
kann iC-MQ den Überlastungsfall als Systemfehler in
den Fehlerspeicher übertragen, wenn eine Rückmel-
dung an den bidirektionalen I/O-Pin ERR erfolgt (wie
gezeigt).
iC-MQiC-DL
Bild 14: Applikationsbeispiel mit 24 V-Leitungstreiber

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 37/39
APPLIKATIONSHINWEISE
In-Circuit Programmierung des EEPROMs
Es kann ungestört auf das EEPROM zugegriffen wer-
den, wenn die Versorgungsspannung von iC-MQ unter
der Abschaltschwelle VDDoff gehalten wird. Dafür ist
ein EEPROM erforderlich, das ab einer Betriebspan-
nung von 2.5 V funktioniert. Sind jedoch 3.3 V zum
Betrieb des EEPROMs erforderlich, kann die Versor-
gungsspannung von iC-MQ bis maximal zur Einschalt-
schwelle VDDon erhöht werden, was ohne ein Über-
schwingen erfolgen muss.
Die von den Pins VDDS und GNDS zur Verfügung
gestellte Versorgungspannung kann zur Versorgung
des EEPROMs genutzt werden; die Abschaltung er-
folgt nur im Verpolungsfall. Zu beachten ist der lastab-
hängige Spannungsabfall an beiden Schaltern, siehe
Vs(VDDS) und Vs(GNDS) in den Elektrischen Kenn-
daten C01, C02.
Absolute Winkelgenauigkeit und Flankenjitter
Die exakte Einstellung der Signalkonditionierung zur
Korrektur der analogen Eingangssignale ist entschei-
dend für das Interpolationsergebnis - der erhaltene ab-
solute Winkelfehler bestimmt den minimal vorhande-
nen Signaljitter. Dabei ist der Einfluss auf den Flanken-
abstand der A/B-Ausgangssignale nicht immer gleich
groß, sondern vom absoluten Phasenwinkel der Ein-
gangssignale abhängig. Die folgenden Erläuterungen
geben ein Beispiel für einen Interpolationsfaktor von
100, beziehungsweise 400 Flanken pro Sinus-Periode.
Der Offsetfehler im Cosinus-Signal wirkt sich bei 90°
und 270° am stärksten auf den absoluten Winkel-
fehler aus, bei 0° und 180° jedoch am stärksten
auf den Flankenabstand. Mit einer Bereichseinstellung
von OR1 = OR2 = 00 und VOSSC = 01 kann der Offset-
fehler mit einer Schrittweite von 3.9 mV abgeglichen
werden. Würde der Offset um einen Schritt (1 LSB)
fehlabgeglichen, ergäbe sich eine Vergrößerung des
absoluten Winkelfehlers um etwa 0.45° und eine Varia-
tion des Flankenabstands um etwa +/- 0,8 %. Für das
Sinus-Signal gilt ähnliches, nur die Maxima wären um
90° verschoben.
Ein Amplitudenfehler wirkt sich bei 45°, 135°, 225°
und 315° am stärksten auf den absoluten Winkelfeh-
ler aus, die größte Veränderung des Flankenabstands
ist bei 0°, 90°, 180° und 270° zu finden. iC-MQ kann
das Amplitudenverhältnis in Schritten von 1.5 % aus-
gleichen, sodass ein Fehlabgleich um 1 LSB den ab-
soluten Winkelfehler um etwa 0.42° vergößern würde.
Für den Flankenabstand wäre mit einer Variation von
+/- 1.5 % zu rechnen.
Ein Phasenfehler zwischen dem Sinus- und Cosinus-
Signal (die Abweichung der Phasenverschiebung von
ideal 90 Grad) wirkt sich bei 0°, 90°, 180° und 270°
am stärksten auf den absoluten Winkelfehler aus. Der
größte Einfluss auf den Flankenabstand ergibt sich bei
45°, 135°, 225° und 315°. Die Phasenkorrektur von
iC-MQ erlaubt eine Schrittweite von 0.64°, sodass ein
Fehlabgleich um 1 LSB den absoluten Winkelfehler um
etwa 0.64° vergößern würde. Die Variation im Flanken-
abstand würde etwa +/- 1.1 % betragen.
Für eine perfekt durchgeführte Signalkonditionierung
kann jeweils ein halber Abgleichschritt als Restfehler
angenommen werden. Damit würde iC-MQ, theore-
tisch, eine absolute Winkelgenauigkeit von ca. 0.5° mit
einer Variation des Flankenabstands von ca. +/- 1.5 %
erreichen. Zusätzlich müssen jedoch Linearitätsfehler
des Interpolators berücksichtigt werden, die den ab-
soluten Winkelfehler um ca. 0.12° vergrößern - und
die Variation des Flankenabstands um 0.4 %. Somit er-
reicht iC-MQ mit idealen, quasi statischen Eingangssi-
gnalen eine absolute Winkelgenauigkeit von 0.62° und
eine Variation des Flankenabstands von unter 2 %.
Hinweise zum Demo-Board
Im Auslieferungszustand erwartet das Demo-Board
EVAL MQ1D an den Eingängen X3 bis X6 differenti-
elle Sin/Cos-Signale mit einer Amplitude von 125 mV,
d.h.
V (X4) = 2.5 V + 0.125 Vsin(ϕt)
V (X3) = 2.5 V − 0.125 Vsin(ϕt)
V (X5) = 2.5 V + 0.125 Vsin(90 + ϕt)
V (X6) = 2.5 V − 0.125 Vsin(90 + ϕt)
Die Ausgänge PA, NA, PB und NB liefern ein
differentielles AB-Signal mit einer Winkelauflösung
von 4 (Interpolationsfaktor 1). Wenn hohe Sinus-
Eingangsfrequenzen angelegt werden oder die Auflö-
sung erhöht wird, müssen der Mindestflankenabstand
(MTD), die Kurzschlussstrombegrenzung (SIK) und
die Treiber-Slewrate (SSR) den Anforderungen ange-
passt werden. Beispielsweise ist ein Mindestflanken-
abstand von MTD = 8 zu wählen, bei einer Auflösung
von 200 (Interpolationsfaktor 50), wenn Eingangsfre-
quenzen bis 20 kHz angelegt werden sollen.

iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 38/39
iC-Haus behält sich ausdrücklich das Recht vor, seine Produkte und/oder Spezifikationen zu ändern. Über erfolgte Änderungen und Ergänzungen zu den jeweilsaktuellen Spezifikationen im Internet auf unserer Homepage www.ichaus.de/infoletter informiert ein Infoletter, der automatisch erzeugt und als E-Mail an einge-tragene Nutzer verschickt wird.Ein Nachdruck dieser Spezifikation – auch auszugsweise – ist nur mit unserer schriftlichen Zustimmung und unter genauer Quellenangabe zulässig.Die angegebenen Daten dienen ausschließlich der Produktbeschreibung. Dies gilt insbesondere auch für die angegebenen Verwendungsmöglichkeiten/Einsatz-bereiche des Produktes.Eine Garantie hinsichtlich der Eignung oder Zuverlässigkeit des Produktes für die konkret vorgesehene Verwendung wird von iC-Haus nicht übernommen.iC-Haus überträgt an dem Produkt kein Patent, Copyright oder sonstiges Schutzrecht.Für die Verletzung etwaiger Patent- und/oder sonstiger Schutzrechte Dritter, die aus der Ver- oder Bearbeitung des Produktes und/oder der sonstigen konkretenVerwendung des Produktes resultieren, übernimmt iC-Haus keine Haftung.Unsere Entwicklungen, IPs, Schaltungsprinzipien und angebotenen Integrierten Schaltkreise sind grundsätzlich geeignet, naheliegend und vorgesehen für einenzweckentsprechenden Einsatz in technischen Applikationen, z. B. in Geräten und Systemen und in beliebigen technischen Einrichtungen, soweit sie nicht be-stehende Schutzrechte verletzen. Prinzipiell sind die Verwendungsmöglichkeiten technisch nicht beschränkt und beziehen sich beispielsweise auf Produkte desWarenverzeichnisses für die Außenhandelsstatistik, Ausgabe 2008 und folgende, jährlich herausgegeben vom Statistischen Bundesamt, Wiesbaden, oder aufein beliebiges Produkt des Produktkatalogs der Hannover-Messe 2007 und folgender.Eine zweckentsprechende Applikation unserer veröffentlichten Entwicklungen verstehen wir als Stand der Technik, die nicht mehr als erfinderisch im Sinne desPatentgesetzes gelten kann. Unsere expliziten Applikationshinweise sind nur als Ausschnitt der möglichen, besonders vorteilhaften Anwendungen zu verstehen.
iC-MQ PROGRAMMIERBARER 9-BIT
Sin/Cos-INTERPOLATOR MIT RS422 TREIBER
Ausgabe D3, Seite 39/39
BESTELLINFORMATION
Typ Gehäuse Bestellbezeichnung
iC-MQ TSSOP20 iC-MQ TSSOP20
Evaluation Board iC-MQ iC-MQ EVAL MQ1D
Technischen Support und Auskünfte über Preise und Lieferzeiten geben:
iC-Haus GmbH Tel.: (0 61 35) 92 92-0
Am Kuemmerling 18 Fax: (0 61 35) 92 92-192
55294 Bodenheim Web: http://www.ichaus.com
E-Mail: [email protected]
Autorisierte Distributoren nach Region: http://www.ichaus.de/sales_partners







