
Sensortechnik
Prof. Dr. Michael ten Hompel
Sascha Feldhorst
Lehrstuhl für Förder- und Lagerwesen
TU Dortmund
Identifizierungs- und
Automatisierungstechnik
1
Organisatorisches
Einführung
Szenarien
Verzweigungen
Regalbediengeräte
Fahrerlose Transportfahrzeuge
Weitere Sensoren
Klassifizierung
Klassische Probleme
Gliederung
Sensortechnik
2
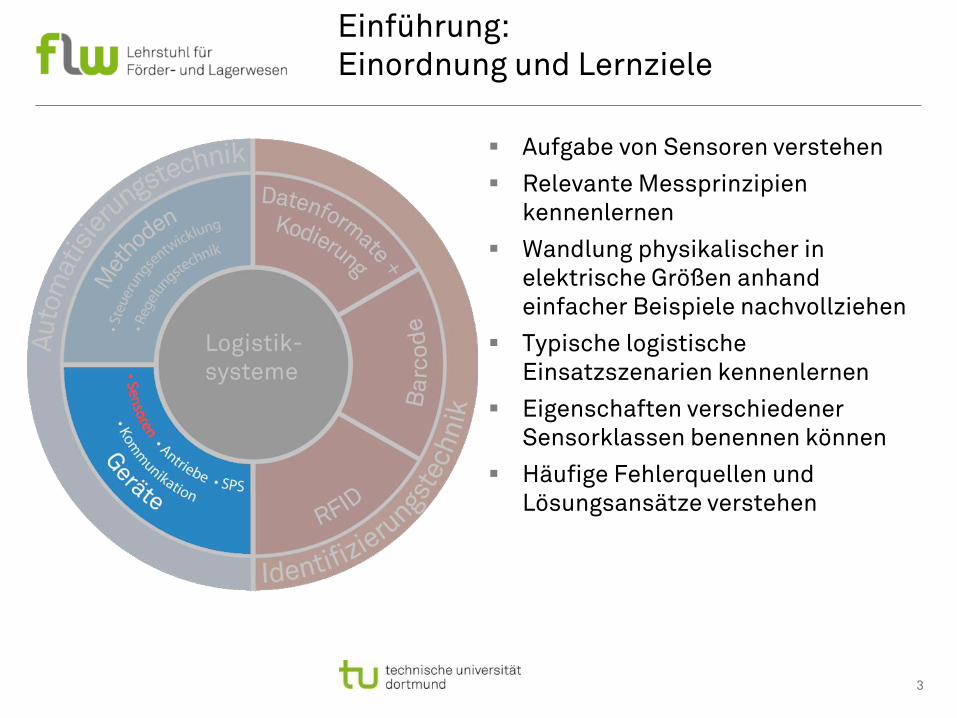
Einführung:
Einordnung und Lernziele
Aufgabe von Sensoren verstehen
Relevante Messprinzipien
kennenlernen
Wandlung physikalischer in
elektrische Größen anhand
einfacher Beispiele nachvollziehen
Typische logistische
Einsatzszenarien kennenlernen
Eigenschaften verschiedener
Sensorklassen benennen können
Häufige Fehlerquellen und
Lösungsansätze verstehen
3
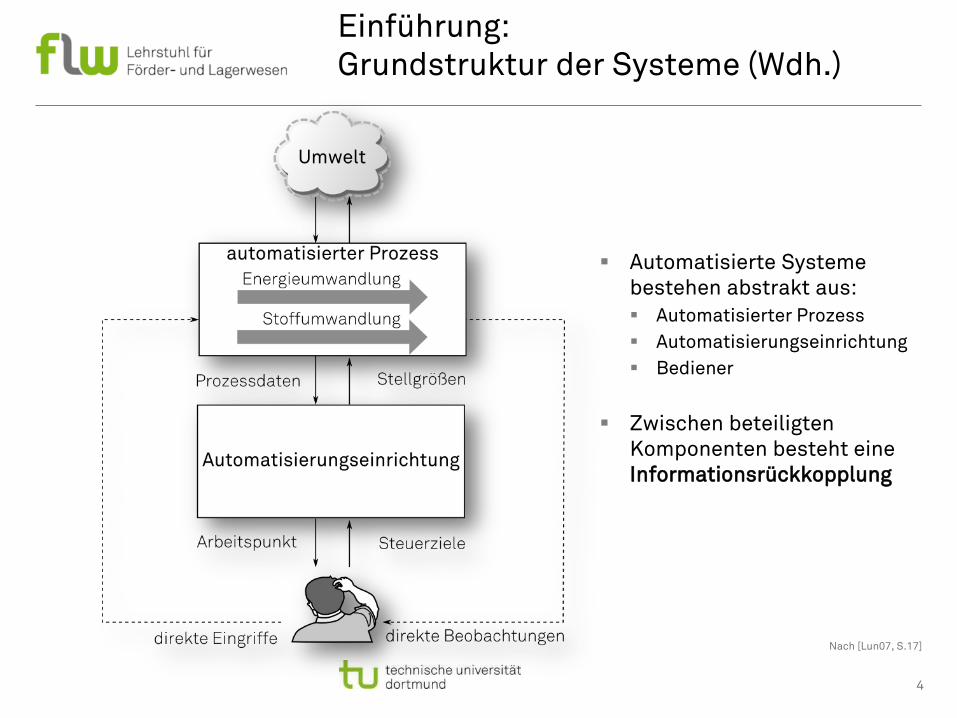
Einführung:
Grundstruktur der Systeme (Wdh.)
Automatisierte Systeme
bestehen abstrakt aus:
Automatisierter Prozess
Automatisierungseinrichtung
Bediener
Zwischen beteiligten
Komponenten besteht eine
Informationsrückkopplung
Nach [Lun07, S.17]
4
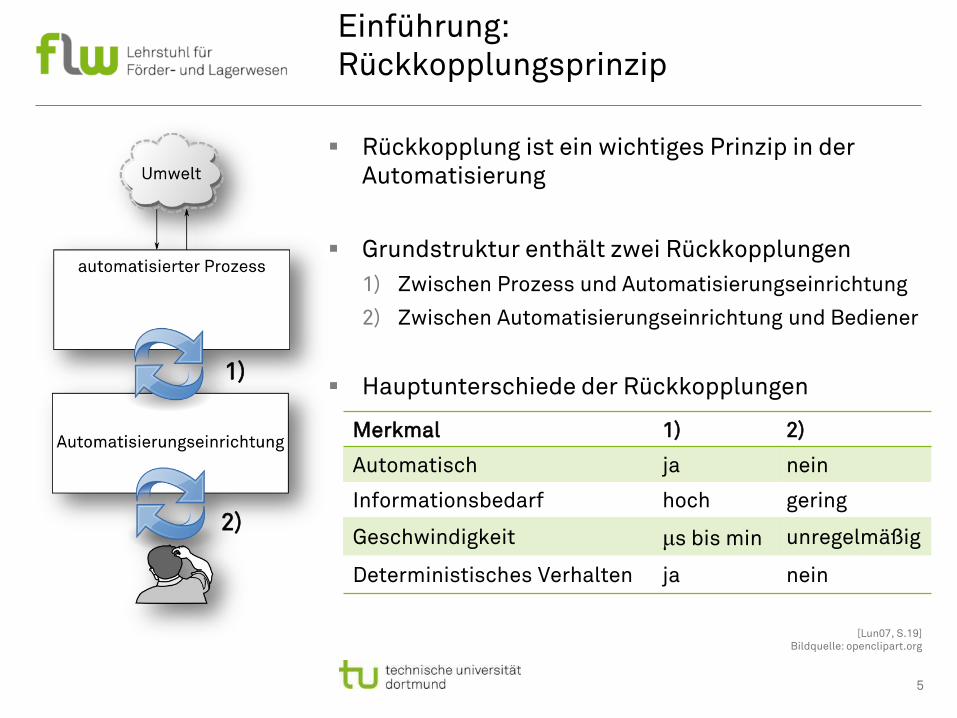
Einführung:
Rückkopplungsprinzip
Rückkopplung ist ein wichtiges Prinzip in der
Automatisierung
Grundstruktur enthält zwei Rückkopplungen
1) Zwischen Prozess und Automatisierungseinrichtung
2) Zwischen Automatisierungseinrichtung und Bediener
Hauptunterschiede der Rückkopplungen
[Lun07, S.19]
Bildquelle: openclipart.org
1)
2)
Merkmal 1) 2)
Automatisch ja nein
Informationsbedarf hoch gering
Geschwindigkeit μs bis min unregelmäßig
Deterministisches Verhalten ja nein
5

Einführung:
Beteiligte Komponenten
6
Einführung:
Begriffliches
Sensor (von lat. sensus: Sinn, Gefühl) ist kein
einheitlich verwendeter Begriff!
Im Zuge dieser Vorlesung gilt:
„Ein Sensor ist ein Sammelbegriff für Geräte, die Prozesswerte ,meist nichtelektrischer Art, aufnehmen und in elektrische Größen umwandeln.“
Hauptaufgaben:
Sinnesorgane des Menschen nachbilden
Aufnahme von Prozesswerten
Bereitstellung dieser Prozesswerte
für angeschlossene Automatisierungsgeräte
7
Einführung:
Sensorspektrum
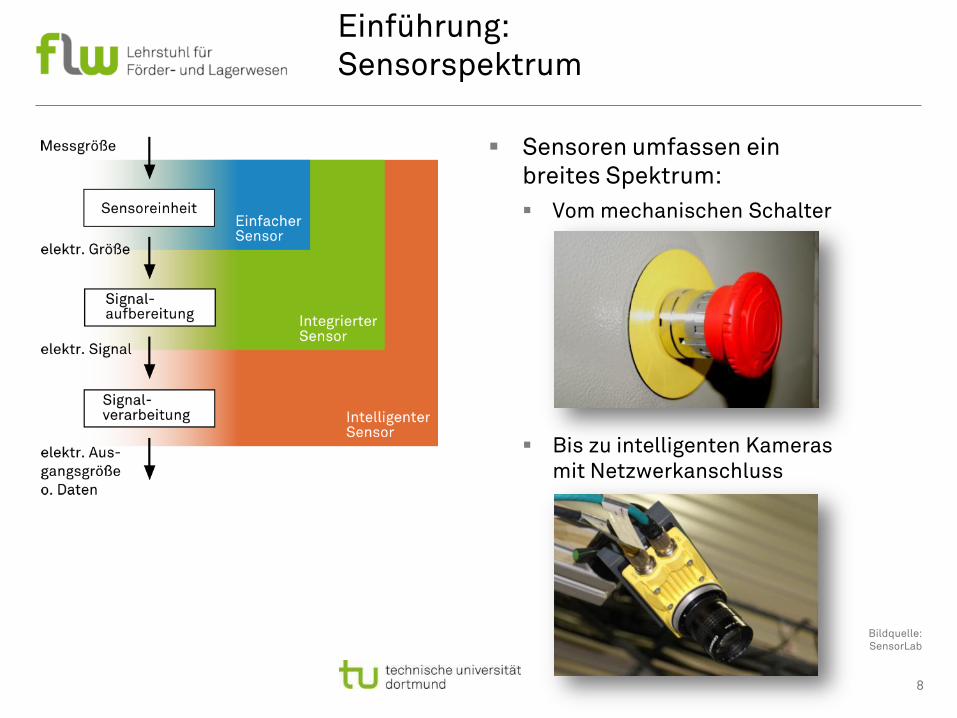
Sensoren umfassen ein
breites Spektrum:
Vom mechanischen Schalter
Bis zu intelligenten Kameras
mit Netzwerkanschluss
Bildquelle:
SensorLab
8

Einführung:
Allgemeines zu Sensoren
Arbeitsweise:
Abstrakt ist ein einfacher Sensor ein Signalwandler,
der einen Prozesswert in eine elektrische Größe
umwandelt (U, I, R, E)
Umwandlung nutzt technische Aufnehmer
Es sind etwa 100 physikalische, chemische oder
biologische Effekte bekannt, die für Sensoren
genutzt werden
Ausführungen
Berührungsgebundene Sensoren (taktil)
Berührungslose Sensoren (nicht taktil)
9

Einführung:
Häufige Messprinzipien
Prinzip Erklärung
Mechanisch Von außen einwirkende Kraft schließt oder öffnet elektrischen Kontakt
Optisch
Lichtsignal wird zwischen Quelle und Detektor ausgetauscht und festgelegte
Eigenschaften auf Empfängerseite erhoben, wie Intensität, Phasenverschiebung
oder Lichtlaufzeit
Ele
ktr
isc
h
Resistiv
Messung der Veränderung des Widerstands eines einzelnen Widerstands oder
eines Widerstandssystems. Änderung des Widerstands kann anwendungs-
spezifisch auf verschiedene Arten erfolgen
Induktiv
Messung der Veränderung der Induktivität einer einzelnen Spule oder eines
ganzen Spulensystems. Änderung der Induktivität kann anwendungsspezifisch auf
verschiedene Arten erfolgen
Kapazitiv
Messung der Veränderung der Kapazität eines einzelnen Kondensators oder eines
ganzen Kondensatorsystems. Änderung der Kapazität kann anwendungsspezifisch
auf verschiedene Arten erfolgen
Ultraschall Objekt reflektiert ausgesendeten Schall und über Laufzeitmessungen kann so eine
Detektion bzw. Entfernungsmessung erfolgen
10

Einführung:
Messgröße Elektrischer Widerstand
Elektrischer Widerstand bestimmt die Spannung,
die nötig ist, um einen Strom durch einen Leiter
fließen zu lassen.
Eigenschaften:
Jeder Leiter setzt elektrischem Strom
einen Widerstand entgegen
Stromstärke I umgekehrt
proportional zum Widerstand R
Maßeinheit: Ohm (Ω)
Direkt messbar oder indirekt über Brückenschaltung
Beeinflussbar durch:
Material (p), Leiterquerschnitt (A), Leiterlänge(l),
Temperatur, Licht, Druck, Dehnung, usw.
11
Bildquelle: Bild unten (Wikipedia)
𝑅 = 𝜌𝑙
𝐴

Einführung:
Beispiel einfacher Positionssensor
Idee:
Positionsbestimmung
mit Potentiometer
Widerstandswert ändert sich durch
Betätigung des Potentiometers
Widerstandsänderung erfassen und
in x-Wert daraus ableiten
Funktionsweise:
Potentiometer ist ein verstellbarer
Widerstand mit drei Anschlüssen
Poti-Position ändert Spannung U23
Spannungsmessung liefert Position
Auch auf Winkelmessung anwendbar
12
𝑋 = 𝑋𝑚𝑎𝑥
𝑈23𝑈13
1 2
3
θmax
θ
𝜃 = 𝜃𝑚𝑎𝑥
𝑈23𝑈13

Einführung:
Messgröße Kapazität
13
Bildquelle:
Fabian R., Wikipedia
Die Kapazität bezeichnet die Eigenschaft eines
Bauteils eine elektrische Ladung zu speichern.
Eigenschaften:
Begriff wird synonym für
Kondensatoren gebraucht
Maßeinheit: Farad (F)
C ist nicht das Fassungsvermögen!
Kann durch Messbrücke oder Schwingkreis
bestimmt werden
Beeinflussbar durch:
Plattenfläche (A), Plattenabstand (d),
Permittivität (𝜀), usw.

Einführung:
Messgröße Induktivität
Die Induktivität beschreibt die Fähigkeit eines
stromdurchflossenen Leiters aufgrund der
Änderung der Stromstärke ein Magnetfeld
aufzubauen.
Eigenschaften:
Zeigt den Zusammenhang von
elektrischen und magnetischen Feldern
Begriff wird synonym für Spulen gebraucht
Maßeinheit: Henry (H)
Kann durch Messbrücke oder Schwingkreis
bestimmt werden
Beeinflussbar durch:
Wicklungszahl, Permeabilität, usw.
14
Bildquelle: Zureks, Wikipedia

Anwesenheit:
Anwesenheit eines
Objekts an einer Stelle
Position/Entfernung:
Erfassen definierter
Punkte während des
Transports (1D, 2D, 3D)
Weg:
Zurückgelegte Strecke
eines Guts oder Gewerks
Relativ
Absolut
Geschwindigkeit:
Aktuelle Geschwindigkeit
eines Guts oder Gewerks
Zeit:
Vergangene Zeit seit
Ereignis, z.B. Systemstart
Objekteigenschaften:
Art, Sorte, Eigenschaft
eines Objekts
Objektidentifikation
Indirekte Merkmale
(Barcodes, RFID,
Beschriftungen etc.)
Direkte Merkmale
(Kanten, Bohrungen,
Strukturen etc.)
Menge:
Summierung von
1-Bit Impulsen
Einführung:
Häufige Prozesswerte im Materialfluss
15

Szenario: Verzweigungen
16
Szenario: Verzweigungen –
Beschreibung
Ort:
Verzweigungselemente in Stetigförderanlagen
Aufgabe:
Pakete kommen an und müssen entsprechend
ihrem Ziel geleitet werden
Messwerte:
Paketanwesenheit
Eingang der Verzweigung
Ausgänge der Verzweigung
Paketidentität/-typ
Position des Verzweigungselements
17

Szenario: Verzweigungen –
Beispiel Energieeffizienzanlage
Fraunhofer IML betreibt eine Förderanlage zu
Energieeffizienzbetrachtungen
Verzweigungselemente:
Rollentransfer (Rollenausschleuser)
Kettentransfer
Gurttransfer
Verbaute Sensoren:
Messwerte Sensortyp
Paketanwesenheit Lichttaster
Paketidentität RFID-Lesegerät
Weichenposition Induktivsensor
18
Szenario: Verzweigungen –
Lichttaster
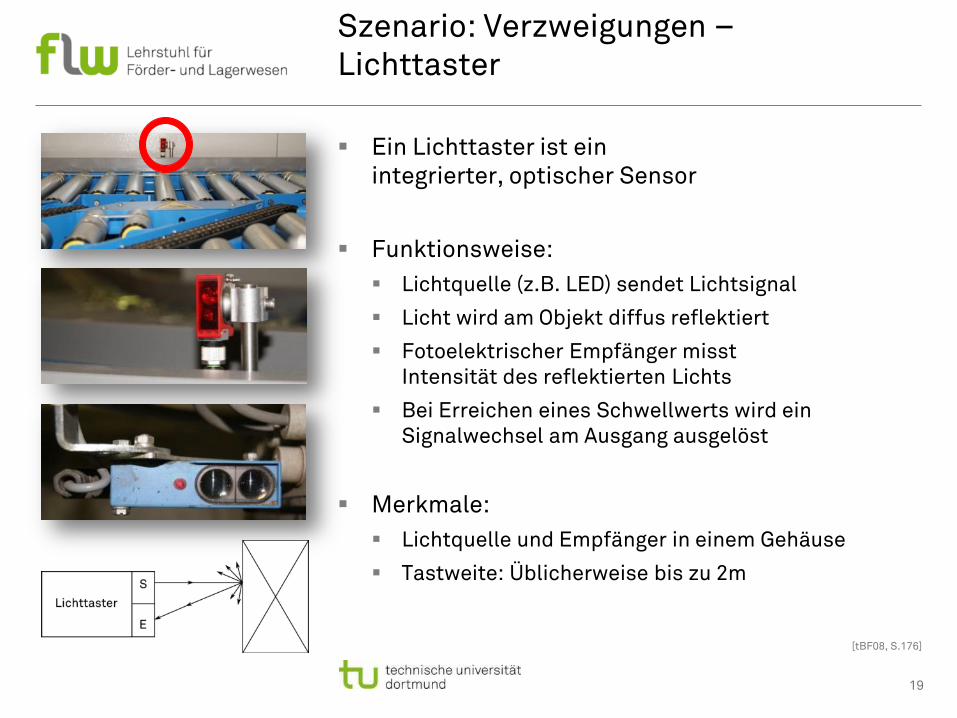
Ein Lichttaster ist ein
integrierter, optischer Sensor
Funktionsweise:
Lichtquelle (z.B. LED) sendet Lichtsignal
Licht wird am Objekt diffus reflektiert
Fotoelektrischer Empfänger misst
Intensität des reflektierten Lichts
Bei Erreichen eines Schwellwerts wird ein
Signalwechsel am Ausgang ausgelöst
Merkmale:
Lichtquelle und Empfänger in einem Gehäuse
Tastweite: Üblicherweise bis zu 2m
[tBF08, S.176]
19

Szenario: Verzweigungen –
RFID-Lesegerät
Ein RFID-Lesegerät ist ein
intelligenter Identifikationssensor
Funktionsweise:
Antenne baut elektrisches, magnetisches oder
elektro-magnetisches Feld auf
Feld regt Schwingkreis im Tag an (Energieversorgung)
Information wird auf Trägerfrequenz aufmoduliert
Gegenstation (Lesegerät oder Tag) filtert Information
heraus und wertet diese aus
Merkmale:
Antenne u. Auswertung meist nicht in einem Gehäuse
Reichweite: Abhängig von Frequenzbereich und
Stromversorgung des Tags (aktive und passive Tags)
[tBF08, S.176]
20

Szenario: Verzweigungen –
Induktiver Näherungsschalter
Ein Induktiver Näherungsschalter ist ein
integrierter, induktiver Sensor
Funktionsweise:
Oszillator versorgt
Spulen- und Ferritkernbaugruppe (SFK) mit Energie
SFK erzeugt hochfrequentes Wechselfeld
Leitendes Objekt entzieht dem Feld Energie
Triggerschaltkreis erfasst Veränderung der
Schwingkreisamplitude
Bei Erreichen eines Schwellwerts wird ein
Signalwechsel am Ausgang ausgelöst
Merkmale:
Schaltabstand: Einige mm bis wenige cm
(ca. 5-15mm)
Bildquelle: Rockwell Automation
21

Szenario: Regalbediengerät
22

Szenario: Regalbediengerät –
Beschreibung
Ort:
Regalbediengerät in Hochregal
Aufgabe:
Paletten ein-, um- oder auslagern
Messwerte:
Palettenanwesenheit
Auf Lastaufnahmemittel
In Lagerfächern
Palettenidentität/-typ
Palettenprofil
Palettengewicht
Position (Fahrwerk, Gabel)
23

Szenario: Regalbediengerät –
Beispiel Hochregal des FLW
FLW betreibt in seiner Versuchshalle Hochregal
samt automatisierten RBG
Verbaute Sensoren:
Messwerte Sensortyp
Palettenanwesenheit
(Fach) Lichttaster
Palettenanwesenheit
(Lastaufnahmemittel) Reflexionslichtschranke
Palettenidentität Barcode-Scanner
Palettenprofil Lichtvorhang
Palettengewicht Wägezelle
Position (Fahrwerk) Absolutkodierter Wegerfasser
24

Szenario: Regalbediengerät –
Reflexionslichtschranke
Eine Reflexionslichtschranke ist ein
integrierter, optischer Sensor
Funktionsweise:
Lichtquelle sendet Lichtsignal
Licht wird an Reflektor reflektiert (Totalreflexion)
Fotoelektrischer Empfänger misst
Intensität des reflektierten Lichts
Bei Unterbrechung der optischen Strecke wird ein
Signalwechsel am Ausgang ausgelöst
Merkmale:
Lichtquelle und Empfänger in einem Gehäuse
Tastweite: 0,1m bis zu 10m
25
Szenario: Regalbediengerät –
Barcodescanner
Bildquelle: EN ISO/IEC 15416
[tBF08, S. 93]
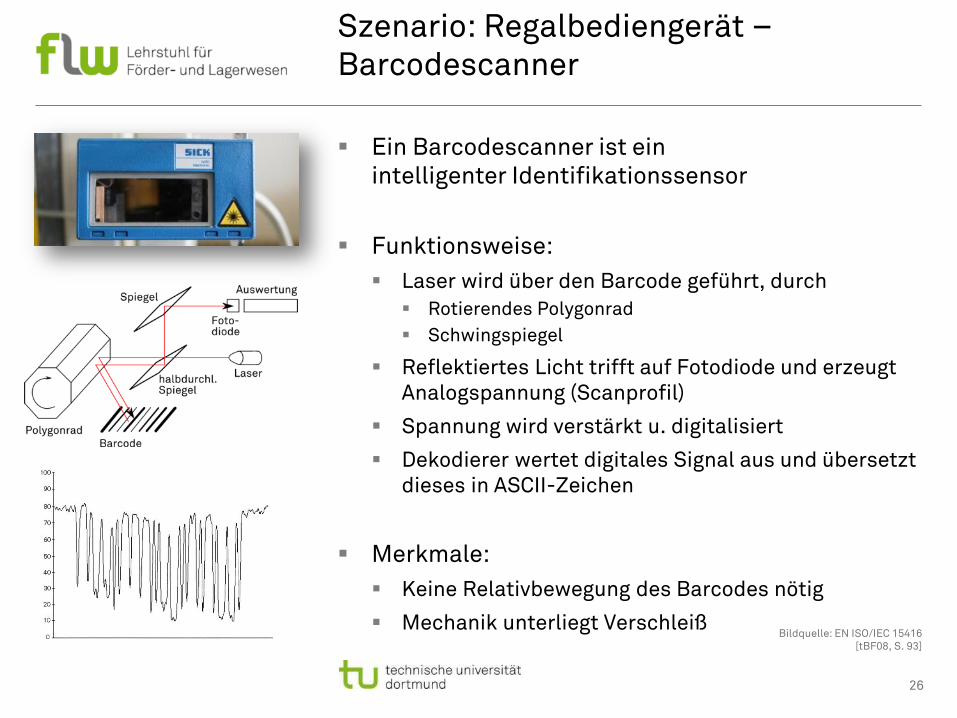
Ein Barcodescanner ist ein
intelligenter Identifikationssensor
Funktionsweise:
Laser wird über den Barcode geführt, durch
Rotierendes Polygonrad
Schwingspiegel
Reflektiertes Licht trifft auf Fotodiode und erzeugt
Analogspannung (Scanprofil)
Spannung wird verstärkt u. digitalisiert
Dekodierer wertet digitales Signal aus und übersetzt
dieses in ASCII-Zeichen
Merkmale:
Keine Relativbewegung des Barcodes nötig
Mechanik unterliegt Verschleiß
26

Szenario: Regalbediengerät –
Lichtvorhang
Bildquelle: [tBF08, S.10]
Ein Lichtvorhang oder Lichtgitter ist ein aus
mehreren Lichtschranken zusammengesetzter,
integrierter Sensor
Funktionsweise:
Mehrere Lichtschranken werden zeilenweise
angeordnet
Ausgangssignale der Einzelsensoren werden zu
einem Digitalsignal zusammengefasst
Anwendung:
Profilkontrolle, Absicherung von Lagergassen
27

Szenario: Regalbediengerät –
Einweglichtschranke
Eine Einweglichtschranke ist ein
integrierter, optischer Sensor
Funktionsweise:
Lichtquelle sendet Lichtsignal
Fotoelektrischer Empfänger misst
Intensität des eintreffenden Lichts
Bei Unterbrechung der optischen Strecke wird ein
Signalwechsel am Ausgang ausgelöst
Merkmale:
Lichtquelle und Empfänger
nicht in einem Gehäuse
Tastweite: bis zu 100m
Bildquelle: Cedes
28

Szenario: Regalbediengerät –
Wägezelle
Eine Wägezelle ist ein einfacher Drucksensor zur
Gewichtsbestimmung
Funktionsweise:
Kraftaufnehmer (z.B. Biegestab) verändert durch
Gewicht des Messobjektes seine Form
Dehnungsmessstreifen (DMS) verändern durch
Verformung ihren elektrischen Widerstand
Auswertungseinheit bestimmt Widerstand der DMS
und ermittelt darüber das Gewicht
Merkmale:
Wird in Industriewaagen eingesetzt
Einsetzbar für kleine bis mittlere Gewichte
Bildquelle: SIEMENS
29

Szenario: Regalbediengerät –
Absolutkodierter Wegerfasser
Ein absolutkodierter Wegerfasser ist ein
intelligenter Sensor zur Positionsbestimmung
Funktionsweise:
Maßstab mit Durchbrüchen unterschiedlicher Breite
Sensor bestehend aus mehreren Lichtschranken
wird über den Maßstab bewegt
Im Maßstab kodierter wiederholungsfreier Code wird
von Lichtschranken abgetastet
Im Sensorkopf integrierte Verarbeitungseinheit
berechnet fortlaufend die absolute Position
Merkmale:
Anwendung:
Positionserfassung von RBG- und EHB-Fahrwerken
Genauigkeit: 2-3mm Bildquelle: [tBF08, S.178]
30
Szenario:
Fahrerloses Transportfahrzeug (FTF)
31

Szenario: FTF –
Beschreibung
Ort:
An einem Fahrerlosen Transportfahrzeug
Aufgabe:
Unstetiger Transport von Stückgütern innerhalb
eines logistischen Systems
Messwerte:
Anwesenheit von Hindernissen
Direkter Kontakt (Kollision)
In messbarer Reichweite
Position
Fahrzeugs
Ziel
Bildquelle: DEMATIC,
[tBF08, S.5]
32

Szenario: FTF –
Beispiel Multimedia-FTF am FLW
Der FLW betreibt ein fahrerloses
Transportfahrzeug zu Präsentationszwecken
Für den Einsatz auf Messegeländen konzipiert
Tagsüber Bereitstellung von Multimedia-Inhalten
Abends Standbewachung
Verbaute Sensoren:
Messwerte Sensortyp
Kollision Bumper
Hindernis Laserscanner
Anwesenheit
von Personen CCD-Kamera
33
Szenario: FTF –
Sicherheitsbumper
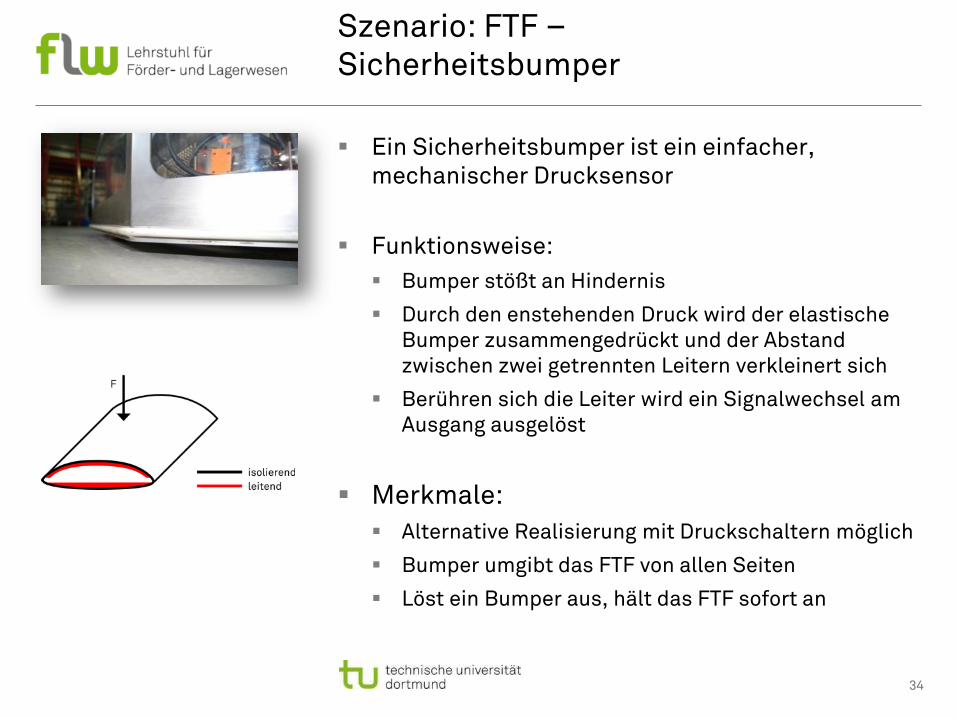
Ein Sicherheitsbumper ist ein einfacher,
mechanischer Drucksensor
Funktionsweise:
Bumper stößt an Hindernis
Durch den enstehenden Druck wird der elastische
Bumper zusammengedrückt und der Abstand
zwischen zwei getrennten Leitern verkleinert sich
Berühren sich die Leiter wird ein Signalwechsel am
Ausgang ausgelöst
Merkmale:
Alternative Realisierung mit Druckschaltern möglich
Bumper umgibt das FTF von allen Seiten
Löst ein Bumper aus, hält das FTF sofort an
34
Szenario: FTF –
Laserscanner
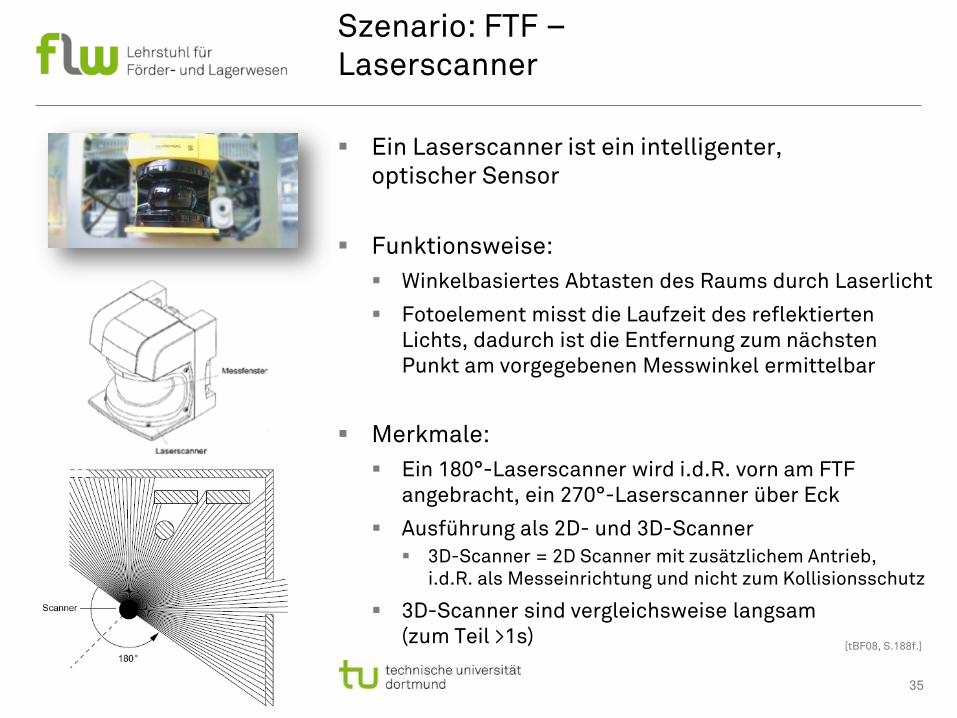
Ein Laserscanner ist ein intelligenter,
optischer Sensor
Funktionsweise:
Winkelbasiertes Abtasten des Raums durch Laserlicht
Fotoelement misst die Laufzeit des reflektierten
Lichts, dadurch ist die Entfernung zum nächsten
Punkt am vorgegebenen Messwinkel ermittelbar
Merkmale:
Ein 180°-Laserscanner wird i.d.R. vorn am FTF
angebracht, ein 270°-Laserscanner über Eck
Ausführung als 2D- und 3D-Scanner
3D-Scanner = 2D Scanner mit zusätzlichem Antrieb,
i.d.R. als Messeinrichtung und nicht zum Kollisionsschutz
3D-Scanner sind vergleichsweise langsam
(zum Teil >1s) [tBF08, S.188f.]
35

Szenario: FTF –
CCD-Kamera
Bildquellen: NASA
Michael Schmid/Wikipedia.de
Eine CCD-Kamera ist ein
intelligenter, optischer Sensor
Funktionsweise:
Licht trifft durch eine Optik auf einen Chip
Chip besteht aus einem Array von
lichtempfindlichen Fotodioden
(zeilen- oder matrixweise Anordnung)
Anzahl der Dioden bestimmt die Auflösung
Chip liefert Bildpunkte
(innerer photoelektrischer Effekt)
Merkmale:
Anwendungen:
Bildverarbeitung, Barcodescanner, etc.
36

Weitere Sensoren:
PMD-Kamera
Eine PMD-Kamera (auch Time-of-Flight-Kamera)
ist ein intelligenter, optischer Sensor
Funktionsweise:
Quelle sendet ein moduliertes Lichtsignal aus
(z.B. im Infrarotbereich)
Von der Szene reflektiertes Licht trifft auf PMD-Chip
Korrelation aus gesendeten und empfangenen Signal
liefert pixelweise Entfernung (Phasenverschiebung)
Auswertungseinheit erzeugt ein Entfernungsbild
(z.B. durch Einfärben)
Merkmale:
Eindeutigkeitsbereich: 0 bis Hälfte der Wellenlänge
Erlauben sehr schnelle Auswertung (bis 100 Bilder/s)
Derzeit noch geringe Auflösungen (i.d.R. 64x48 Pixel)
Aktuell noch sehr teuer Bildquellen:,
PMDTechnologies GmbH/Wikipedia.de, ifm Elektronik
37

Weitere Sensoren:
Kapazitive Näherungssensoren
Ein kapazitiver Näherungssensor ist ein
integrierter Sensor (nicht-taktil)
Funktionsweise:
Sensor erzeugt ein elektrostatisches Feld
Objekt im Feld bedingt Kapazitätsänderung
Kapazitätsänderungen beeinflussen die
Grundschwingung eines Oszillators
Bei Erreichen eines Schwellwerts wird ein
Signalwechsel am Ausgang ausgelöst
Merkmale:
Wirkbereich bis zu einigen cm (bis zu 2,5cm)
Einsatz auch bei nichtleitenden Materialien möglich
Abstimmung auf das Material erforderlich
(anhand der Dielektrizitätskonstante des Materials)
Bildquelle: Rockwell Automation
38

Weitere Sensoren:
Mechanische Sensoren
Ein mechanischer Sensor ist ein einfacher,
berührungsgebundener Sensor (taktil)
Funktionsweise:
Von außen einwirkende Kraft schließt oder öffnet
einen elektrischen Kontakt
Merkmale:
Einfacher Aufbau
Taktile Arbeitsweise (Führung erforderlich,
Schaltzyklen zu beachten, verschleißanfällig)
Wird i.d.R. bei geringer
Betätigungswahrscheinlichkeit eingesetzt
Ausführungen: Endschalter, Not-Aus-Schalter
39
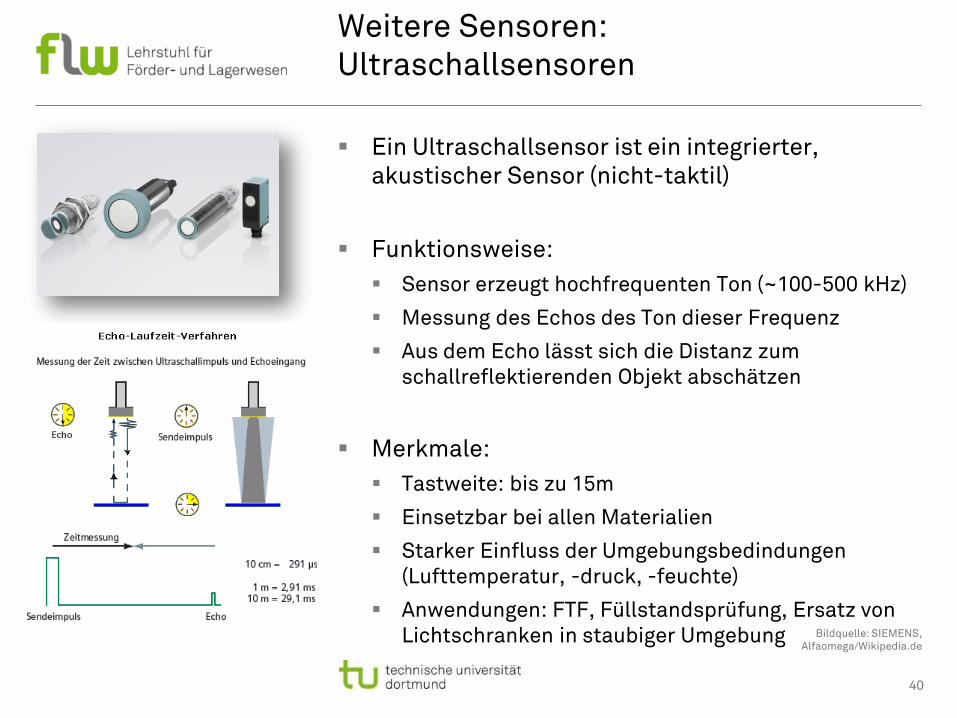
Weitere Sensoren:
Ultraschallsensoren
Ein Ultraschallsensor ist ein integrierter,
akustischer Sensor (nicht-taktil)
Funktionsweise:
Sensor erzeugt hochfrequenten Ton (~100-500 kHz)
Messung des Echos des Ton dieser Frequenz
Aus dem Echo lässt sich die Distanz zum
schallreflektierenden Objekt abschätzen
Merkmale:
Tastweite: bis zu 15m
Einsetzbar bei allen Materialien
Starker Einfluss der Umgebungsbedindungen
(Lufttemperatur, -druck, -feuchte)
Anwendungen: FTF, Füllstandsprüfung, Ersatz von
Lichtschranken in staubiger Umgebung Bildquelle: SIEMENS,
Alfaomega/Wikipedia.de
40

Klassifizierung:
Nach Wirkprinzip
41

Klassifizierung:
Nach Ausgangsgrößen
42

Klassifizierung:
Nach Dimension der Messgröße
Dimension eines Sensors
ist dessen räumlicher
Erfassungsbereich
Messgrößen können
direkten Bezug
zum Messraum haben
0D = Punkt (kein Bezug),
1D = Strecke, 2D = Ebene,
3D = Raum
Umsetzung der
Dimension
Integriert
(z.B. CCD-Kamera)
Kaskade von Sensoren
Zeilenweise Anordnung
Matrixweise Anordnung
43

Klassische Probleme:
Sensorspezifische Einschränkungen
Optische Sensoren
Fremdlichteinfall
Polarisationsfilter verringert Tastweite
Verschmutzung
Speziell bei Lichttastern
Reflexivität des Objekts hat starke
Auswirkungen auf Ansprechverhalten
Problem mit glänzenden Oberflächen
Induktive Sensoren
Sehr kurzer Schaltabstand (<= 1,5cm)
Beeinflussung durch starke EMF
Kapazitive Sensoren
Kurzer Schaltabstand (<=2,5cm)
Einstellung auf das Material nötig
Empfindlich gegenüber Luftfeuchte
Mechanische Sensoren
Prellen, d.h. ein mehrfaches Ein- und
Ausschalten bei einfacher Betätigung
(z.B. bei Endschaltern)
Unterliegen stärkeren Verschleiß
Ultraschallsensoren
Ausrichtung gerader Oberflächen für
ein gutes Echo nötig (+/- 3°)
Vergleichsweise lange Ansprechzeit
(~0,1s)
Änderung von Temperatur, Druck oder
Feuchte verändert Messergebnis
44

Klassische Probleme:
Übersprechen
Übersprechen in der Sensortechnik bezeichnet
das fehlerhafte Ansprechen eines Sensors auf die
Signale eines benachbarten Sensors (Interferenz)
Arten des Übersprechens
Akustisch bei Ultraschallsensoren
Optisch bei Lichtschranken oder PMD-Kameras
Auch kapazitive und induktive Näherungssensoren
können sich gegenseitig beeinflussen
Lösungen
Sensorspezifischen Abstand einhalten
Multiplexen (z.B. Zeit, Frequenz)
Bildquelle: Rockwell Automation
45
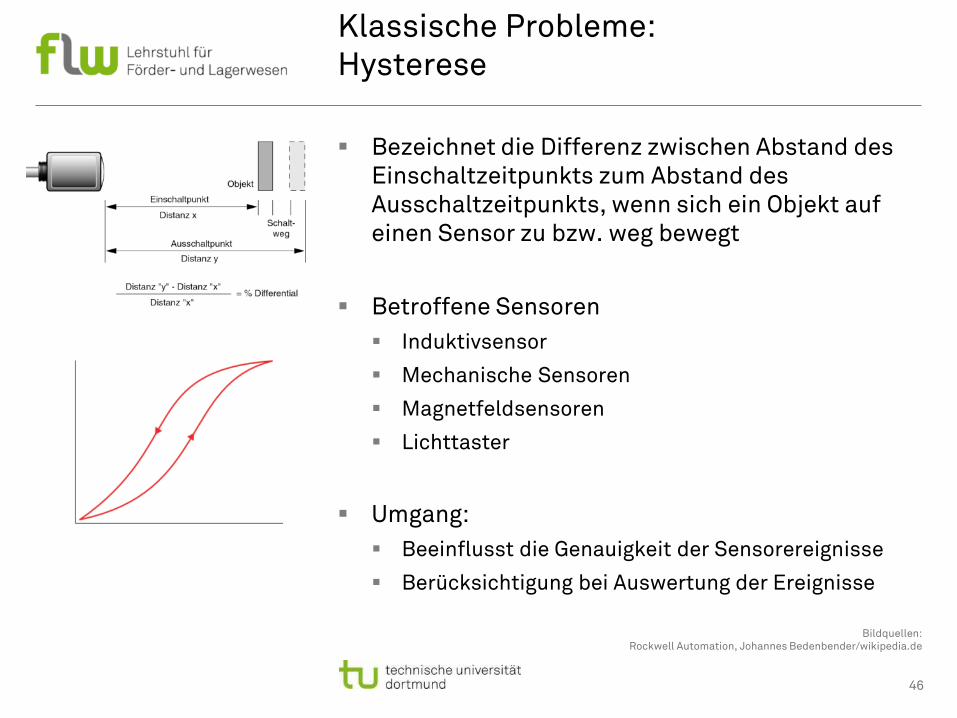
Klassische Probleme:
Hysterese
Bezeichnet die Differenz zwischen Abstand des
Einschaltzeitpunkts zum Abstand des
Ausschaltzeitpunkts, wenn sich ein Objekt auf
einen Sensor zu bzw. weg bewegt
Betroffene Sensoren
Induktivsensor
Mechanische Sensoren
Magnetfeldsensoren
Lichttaster
Umgang:
Beeinflusst die Genauigkeit der Sensorereignisse
Berücksichtigung bei Auswertung der Ereignisse
Bildquellen:
Rockwell Automation, Johannes Bedenbender/wikipedia.de
46

Klassische Probleme:
Messfehler
Statistische Fehler
Dabei handelt es sich um zufällige Messfehler,
sogenannte Ausreißer
Lassen sich i.d.R. nicht beheben
Beispiel: Thermisches Rauschen eines Sensors
Systematische Fehler
Fehler, die dadurch entstehen, dass der Sensor
falsch geeicht ist
Äußern sich durch konstanten oder proportionalen
Verschiebung der Messwerte
Lassen sich durch Kalibrierung beheben
Beispiel: Ultraschallsensor
Einstellung der Schallgeschwindigkeit
am Einsatzort mittels Referenzsensor
Bildquelle: www.tgs-chemie.de
47
Vielen Dank für Ihre Aufmerksamkeit!
48

Ansprechpartner
Lehrstuhl für Förder- und Lagerwesen
LogistikCampus
Joseph-von-Fraunhofer-Str. 2-4
44227 Dortmund
Telefon: 0231 755-2099
Fax: 0231 755-4768
Prof. Dr. Michael ten Hompel
Mojtaba Masoudinejad, M.Sc.
Telefon: 0231 755-3236
e-Mail: [email protected]
© Lehrstuhl für Förder-und Lagerwesen
Technische Universität Dortmund
Prof. Dr. Michael ten Hompel
49







