
MOTOMAN
MOTOMAN-ES200NBETRIEBSANLEITUNGTYP: YR-ES200N-A00 (STANDARD-SPEZIFIKATION) YR-ES200N-A01 (MIT S-, L-ACHSEN ENDSCHALTERN)
Lesen Sie vor der ersten Inbetriebnahme des Produkts dieses Handbuch gründlich durch, und bewahren Sie es als Nachschlagewerk auf.
MOTOMAN BETRIEBSANLEITUNGMOTOMAN-ES200N BETRIEBSANLEITUNGNX100 BETRIEBSANLEITUNGNX100 BEDIENERHANDBUCHNX100 WARTUNGSHANDBUCH
Die NX100 Betriebsanleitungen sind für eine besondere Verwendung bestimmt. Verwenden Sie stets die richtige Betriebsanleitung.
MOTOMAN HANDBUCH NR. HW0482027-MG_D 3
HW0482027-MG_D
• Diese Handbuch ist hauptsächlich dazu bestimmt den Betrieb und die Wartung des Roboters MOTOMAN-ES200N zu erklären.
• Grundsätzliche Fragen zur Sicherheit sind im Abschnitt 1: "Sicherheit" der NX100 Betriebsanleitung beschrieben. Um einen sicheren und ordnungsgemäßen Betrieb zu gewährleisten, lesen Sie bitte zuerst sorgfältig die NX100 Betriebsanleitung, bevor sie dieses Handbuch lesen.
• Zur besseren Darstellung von Einzelheiten sind einige Zeichnungen mit abgenommenen Schutzverkleidungen oder Schutzabdeckungen dargestellt. Es müssen immer alle Schutzabdeckungen und Verkleidungen montiert sein bevor Sie die Maschine in Betrieb setzen.
• Die Zeichnungen und Abbildungen in diesem Handbuch sind repräsentative Darstellungen. Daher können Unterschiede zwischen der Illustration und dem gelieferten Produkt bestehen.
• MOTOMAN robotec GmbH behält sich das Recht auf technische Änderungen vor. Diese Änderungen können Produktverbesserungen, Modifikationen oder Spezifikationen umfassen. Sollte eine Änderung vorgenommen werden, wird auch die Handbuchnummer überarbeitet.
• Bei Beschädigung oder Verlust Ihres Exemplars der Betriebsanleitung kontaktieren Sie bitte einen Vertreter der Fa. MOTOMAN robotec GmbH, um eine neue Kopie zu bestellen. Die offiziellen Vertretungen sind auf der letzten Seite angeführt. Bitte geben Sie bei der Bestellung die Bestellnummer an. Diese befindet sich auf der Vorderseite dieses Handbuches.
• MOTOMAN robotec GmbH haftet nicht für Schäden, die aus einer unerlaubten Veränderung der Anlage entstehen. Bei unerlaubten Veränderungen der Anlage und des Roboters erlöschen alle Garantieansprüche.
VORSCHRIFT
ACHTUNG
II
HW0482027-MG_D
Hinweise für einen sicheren BetriebLesen Sie dieses Handbuch gründlich vor der Montage, dem Betrieb, der Wartung oder der Inspektion der NX100-Steuerung durch. In diesem Handbuch sind die Anmerkungen für den sicheren Betrieb in die Kategorien: "WARNUNG", "ACHTUNG", "VORSCHRIFT" oder "VERBOTEN" unterteilt.
Sogar die mit "ACHTUNG" beschriebenen Punkte können in einigen Situationen zu schweren Unfällen führen. Befolgen Sie zu jeder Zeit diese wichtigen Punkte.
Weist auf eine potentielle Gefahrensituation hin, die, wenn sie nicht vermieden wird, zu leichten oder mittleren Verletzungen des Bedienpersonals und zu Ausrüstungsschäden führen kann.
Weist auf eine potentielle Gefahrensituation hin, die, wenn sie nicht vermieden wird, zum Tode oder schweren Verletzungen des Bedienpersonals führen kann. Es kann ebenfalls dazu verwendet werden, um auf gefährliche Handlungsweisen hinzuweisen.
Folgen Sie immer genau den Anweisungen unter dieser Überschrift.
Darf niemals durchgeführt werden.
Um zu jeder Zeit den sicheren und einwandfreien Betrieb des Roboters zu garantieren, befolgen Sie alle Anweisungen dieser Betriebs- und Wartungsanleitung, auch wenn diese nicht ausdrücklich mit "ACHTUNG" oder "WARNUNG" ausgewiesen sind.
WARNUNG
ACHTUNG
VORSCHRIFT
VERBOTEN
HINWEIS
III
HW0482027-MG_D
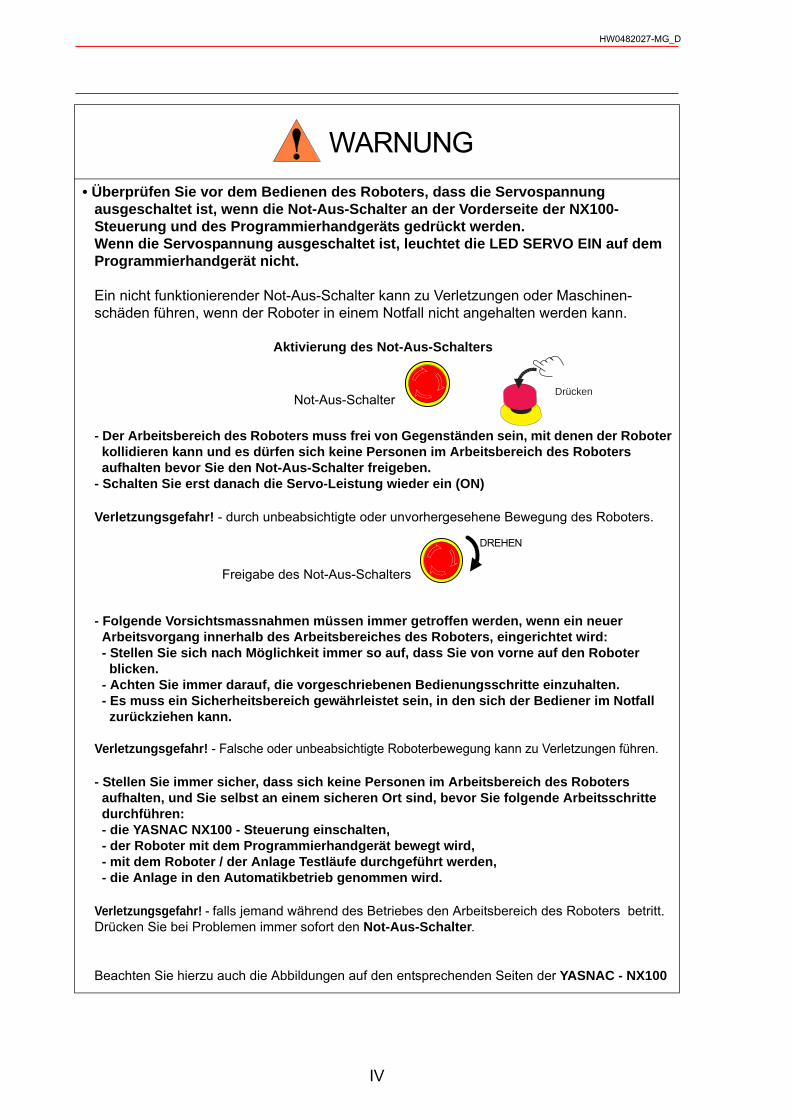
• Überprüfen Sie vor dem Bedienen des Roboters, dass die Servospannung ausgeschaltet ist, wenn die Not-Aus-Schalter an der Vorderseite der NX100-Steuerung und des Programmierhandgeräts gedrückt werden.Wenn die Servospannung ausgeschaltet ist, leuchtet die LED SERVO EIN auf dem Programmierhandgerät nicht.
Ein nicht funktionierender Not-Aus-Schalter kann zu Verletzungen oder Maschinen-schäden führen, wenn der Roboter in einem Notfall nicht angehalten werden kann.
Aktivierung des Not-Aus-Schalters
Not-Aus-Schalter
- Der Arbeitsbereich des Roboters muss frei von Gegenständen sein, mit denen der Roboter kollidieren kann und es dürfen sich keine Personen im Arbeitsbereich des Roboters aufhalten bevor Sie den Not-Aus-Schalter freigeben. - Schalten Sie erst danach die Servo-Leistung wieder ein (ON)
Verletzungsgefahr! - durch unbeabsichtigte oder unvorhergesehene Bewegung des Roboters.
Freigabe des Not-Aus-Schalters
- Folgende Vorsichtsmassnahmen müssen immer getroffen werden, wenn ein neuer Arbeitsvorgang innerhalb des Arbeitsbereiches des Roboters, eingerichtet wird: - Stellen Sie sich nach Möglichkeit immer so auf, dass Sie von vorne auf den Roboter blicken. - Achten Sie immer darauf, die vorgeschriebenen Bedienungsschritte einzuhalten. - Es muss ein Sicherheitsbereich gewährleistet sein, in den sich der Bediener im Notfall zurückziehen kann.
Verletzungsgefahr! - Falsche oder unbeabsichtigte Roboterbewegung kann zu Verletzungen führen.
- Stellen Sie immer sicher, dass sich keine Personen im Arbeitsbereich des Roboters aufhalten, und Sie selbst an einem sicheren Ort sind, bevor Sie folgende Arbeitsschritte durchführen: - die YASNAC NX100 - Steuerung einschalten, - der Roboter mit dem Programmierhandgerät bewegt wird, - mit dem Roboter / der Anlage Testläufe durchgeführt werden, - die Anlage in den Automatikbetrieb genommen wird.
Verletzungsgefahr! - falls jemand während des Betriebes den Arbeitsbereich des Roboters betritt. Drücken Sie bei Problemen immer sofort den Not-Aus-Schalter.
Beachten Sie hierzu auch die Abbildungen auf den entsprechenden Seiten der YASNAC - NX100
WARNUNG
DREHEN
Drücken
IV
HW0482027-MG_D
Festlegung von den in diesem Handbuch am häufigsten verwendeten BegriffenDer MOTOMAN Industrieroboter ist ein Erzeugnis von YASKAWA Industrial Robot.Der Industrieroboter wird normalerweise mit der Steuerung, der Teachbox und allen Versorgungskabeln geliefert.In diesem Handbuch sind die Komponenten folgendermaßen bezeichnet:
• Führen Sie folgende Prüfschritte unbedingt durch, bevor Sie den Roboter einrichten bzw. einen neuen Job teachen. Sollten Probleme auftreten, beheben Sie diese unverzüglich und stellen Sie sicher, dass alle weiterführende Arbeitsschritte durchgeführt worden sind.- Prüfen Sie, ob es Probleme mit der Roboterbewegung gibt.- Prüfen Sie die Isolierung und Abschirmung von freiliegenden Drähten.
• Hängen Sie unverzüglich nach dem Gebrauch des Programmierhandgeräts dieses zurück an den Halter am NX100-Steuerschrank.
Das Programmierhandgerät kann beschädigt werden, wenn es im Arbeitsbereich des Roboters, auf dem Fußboden oder in der Nähe von Vorrichtungen abgelegt wird.
• Sie müssen die Erklärungen der Warnaufkleber im Handbuch der NX100-Steuerung gelesen und verstanden haben, bevor Sie den Roboter bedienen.
Ausrüstung Bezeichnung im Handbuch
NX100-Steuerung NX100
NX100 Teachbox Teachbox
Kabel zwischen dem Roboter und der Steuerung Versorgungskabel des Roboters
ACHTUNG
V
HW0482027-MG_D
☞
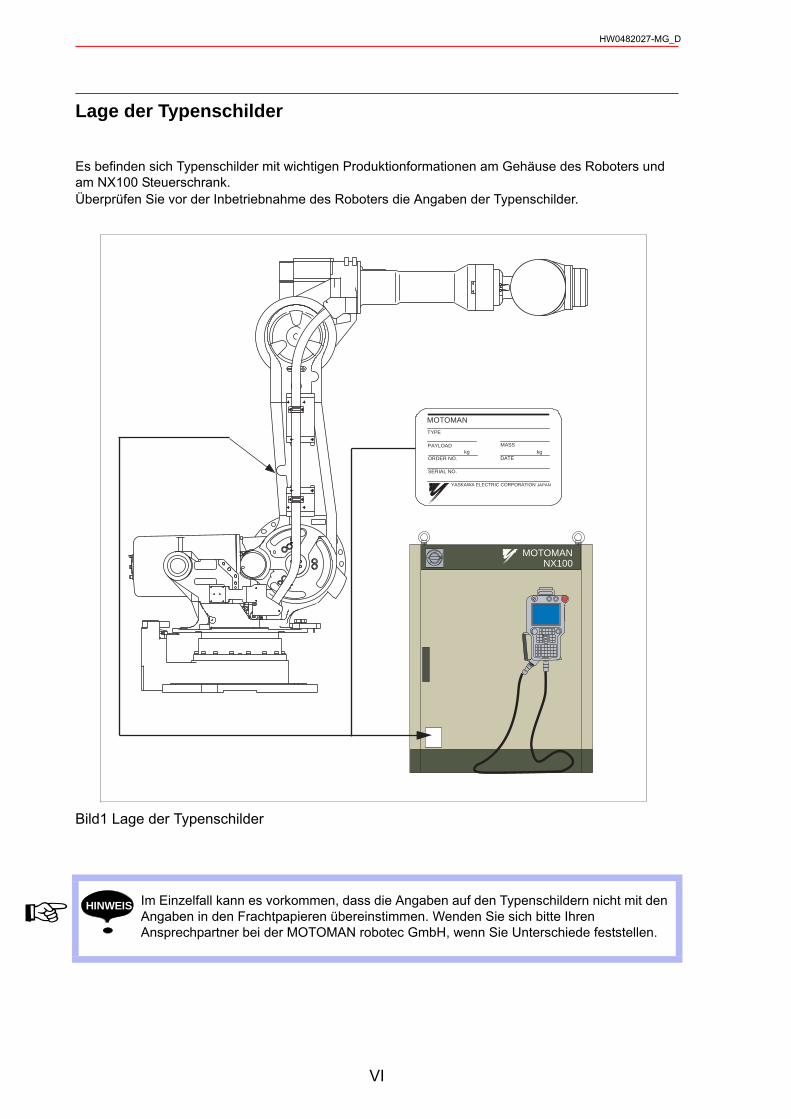
Lage der Typenschilder
Es befinden sich Typenschilder mit wichtigen Produktionformationen am Gehäuse des Roboters und am NX100 Steuerschrank.Überprüfen Sie vor der Inbetriebnahme des Roboters die Angaben der Typenschilder.
Bild1 Lage der Typenschilder
Im Einzelfall kann es vorkommen, dass die Angaben auf den Typenschildern nicht mit den Angaben in den Frachtpapieren übereinstimmen. Wenden Sie sich bitte Ihren Ansprechpartner bei der MOTOMAN robotec GmbH, wenn Sie Unterschiede feststellen.
MOTOMANNX100
MOTOMANTYPE
ORDER NO.
PAYLOADkg
MASSkg
SERIAL NO.
DATE
YASKAWA ELECTRIC CORPORATION JAPAN
HINWEIS
VI

HW0482027-MG_D
1 Empfang1.1 Überprüfung des Lieferumfangs . . . . . . . . . . . . . . . . . . . 1-11.2 Überprüfung der Bestellnummer . . . . . . . . . . . . . . . . . . . 1-2
2 Transport2.1 Transportmethode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
2.1.1 Transport mit einem Kran . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-12.2 Transportsicherungen und Transportschrauben. . . . 2-3
3 Installation3.1 Installieren der Sicherheitseinrichtungen . . . . . . . . . . . 3-23.2 Montageanleitung für den Robotersockel . . . . . . . . . . 3-3
3.2.1 Montagebeispiel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-43.3 Aufstellort . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-4
4 Elektrische Anschlüsse4.1 Erdung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-24.2 Anschluss des Verbindungskabels des Roboters . . 4-2
4.2.1 Anschluss an den Roboter . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-24.2.2 Anschluss an die NX100-Steuerung . . . . . . . . . . . . . . . . . . . . .4-3
5 Spezifikationen5.1 Technische Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-15.2 Teilebezeichnungen und Arbeitsachsen . . . . . . . . . . . 5-25.3 Abmessungen und Lochbild des Robotersockels. . . 5-25.4 Abmessungen und maximaler Arbeitsbereich
des P-Punktes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-35.5 Einstellbarer Arbeitsbereich. . . . . . . . . . . . . . . . . . . . . . . . 5-4
5.5.1 Komponenten für den einstellbaren Arbeitsbereichs. . . . . . . . .5-55.5.2 Einbau des mechanischen Stoppers . . . . . . . . . . . . . . . . . . . . .5-65.5.3 Einstellung der S-Achsen-Pulsebegrenzung . . . . . . . . . . . . . . .5-7
Montage des S-Achsen-Stoppers in unterschiedlichen Winkeln . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-9
VII
HW0482027-MG_D
6 Zulässige Last für die Handgelenksachse und den Handgelenksflansch
6.1 Zulässige Handgelenkslast . . . . . . . . . . . . . . . . . . . . . . . . . 6-16.2 Handgelenksflansch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
7 Systemanwendung7.1 Installation von Zubehör . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-17.2 Innenliegende Kabel und Druckluftführung . . . . . . . . . 7-2
8 Roboteraufbau8.1 Lage des S-Achsen-Endschalters . . . . . . . . . . . . . . . . . . 8-18.2 Innenliegende Verbindungen . . . . . . . . . . . . . . . . . . . . . . . 8-2
9 Wartung und Inspektion9.1 Inspektionszeiträume. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-19.2 Hinweise zu den Wartungsanweisungen . . . . . . . . . . . 9-6
9.2.1 Wechsel der Batterieeinheit . . . . . . . . . . . . . . . . . . . . . . . . . . . 9-69.2.2 Nachfüllen und Tausch der
Fettfüllung des Untersetzungsgetriebes der S-Achse . . . . . . . 9-8Fett nachfüllen
(siehe "Abb. 24 Darstellung des Untersetzungsgetriebes und des S-Achsen-Getriebes") . . . . . . . . . . . . . . . . . . . . . . . 9-8
Tausch der Fettfüllung (siehe "Abb. 24 Darstellung des Untersetzungsgetriebes und des S-Achsen-Getriebes") . . . . . . . . . . . . . . . . . . . . . . . 9-9
9.2.3 Nachfüllen und Tausch der Fettfüllung des L-Achsen-Untersetzungsgetriebes . . . . . . . . . . . . . . . . . . . . . . 9-9Fett nachfüllen (siehe "Abb. 25 Darstellung des
L-Achsen- Untersetzungsgetriebe".). . . . . . . . . . . . . . . . . . 9-10Tausch der Fettfüllung (siehe "Abb. 25 Darstellung des
L-Achsen- Untersetzungsgetriebe".). . . . . . . . . . . . . . . . . . 9-109.2.4 Nachfüllen und Tausch der Fettfüllung des
Untersetzungsgetriebes der U-Achse . . . . . . . . . . . . . . . . . . . . 9-11Fett nachfüllen
(siehe" Abb. 26 Darstellung des U-Achsen-Untersetzungsgetriebes".) . . . . . . . . . . . . . . . . . . . . . . . . . 9-11
VIII

HW0482027-MG_D
Tausch der Fettfüllung (siehe "Abb. 26 Darstellung des U-Achsen-Untersetzungsgetriebes".) . . . . . . . . . . . . . . . . . . . . . . . . . .9-12
9.2.5 Nachfüllen und Tausch der Fettfüllung des U-Arms . . . . . . . .9-13 Nachfüllen der Fettfüllung für das Getriebe der R-, B- und
T-Achse im Gehäuse (siehe "Abb. 27 Darstellung des U-Arms".) . . . . . . . . . . . . .9-14
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der R-Achse (siehe "Abb. 27 Darstellung des U-Arms".) . . . . .9-14
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der B-Achse (siehe "Abb. 27 Darstellung des U-Arms".). . . . . .9-15
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der T-Achse (siehe "Abb. 27 Darstellung des U-Arms".) . . . . . .9-15
Tausch der Fettfüllung der R-, B- und T-Achse im Gehäuse (siehe "Abb. 27 Darstellung des U-Arms"). . . . . .9-16
Tausch der Fettfüllung des Untersetzungsgetriebes derR-Achse (siehe "Abb. 27 Darstellung des U-Arms".) . . . . .9-16
Tausch der Fettfüllung des Untersetzungsgetriebes derB-Achse (siehe "Abb. 27 Darstellung des U-Arms".). . . . . .9-17
Tausch der Fettfüllung des Untersetzungsgetriebes derT-Achse (siehe "Abb. 27 Darstellung des U-Arms".) . . . . .9-18
9.2.6 Fettauffüllung für Ausgleichszylinderanschlussstück . . . . . . .9-199.2.7 Hinweise zu den Wartungsanweisungen. . . . . . . . . . . . . . . . .9-20
Anschluss der Batterieeinheit . . . . . . . . . . . . . . . . . . . . . . . .9-20
10 Empfohlene Ersatzteile
11 Ersatzteilliste11.1 Einheit S-Achse. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-1
11.2 Einheit L-Achse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-3
11.3 Einheit U.R.B.T-Achse . . . . . . . . . . . . . . . . . . . . . . . . . . .11-5
11.4 Einheit U-Arm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-7
11.5 Handgelenkseinheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-9
11.6 Ausgleichszylinder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11-11
IX
1.1 Überprüfung des LieferumfangsHW0482027-MG_D
1 Empfang
1.1 Überprüfung des Lieferumfangs
Überprüfen Sie den Inhalt der Lieferung bei der Annahme.Die Standardlieferung umfasst die folgenden vier Punkte (Informationen hinsichtlich des Lieferumfangs bei Optionen werden getrennt aufgeführt):
• Roboter• NX100• Programmierhandgerät• Verbindungskabel (3 Kabel zwischen der NX100 Steuerung und dem Roboter)
• Überprüfen Sie, ob der Roboter und die NX100 die gleiche Bestellnummer haben. Besondere Vorsicht ist geboten, wenn mehr als ein Roboter installiert wird.
Stimmen die Nummern nicht überein, ist es möglich, dass die Roboter nicht erwartungsgemäß arbeiten und Verletzungen oder Beschädigungen verursachen.
ACHTUNG
1-1
1.2 Überprüfung der Bestellnummer
HW0482027-MG_D
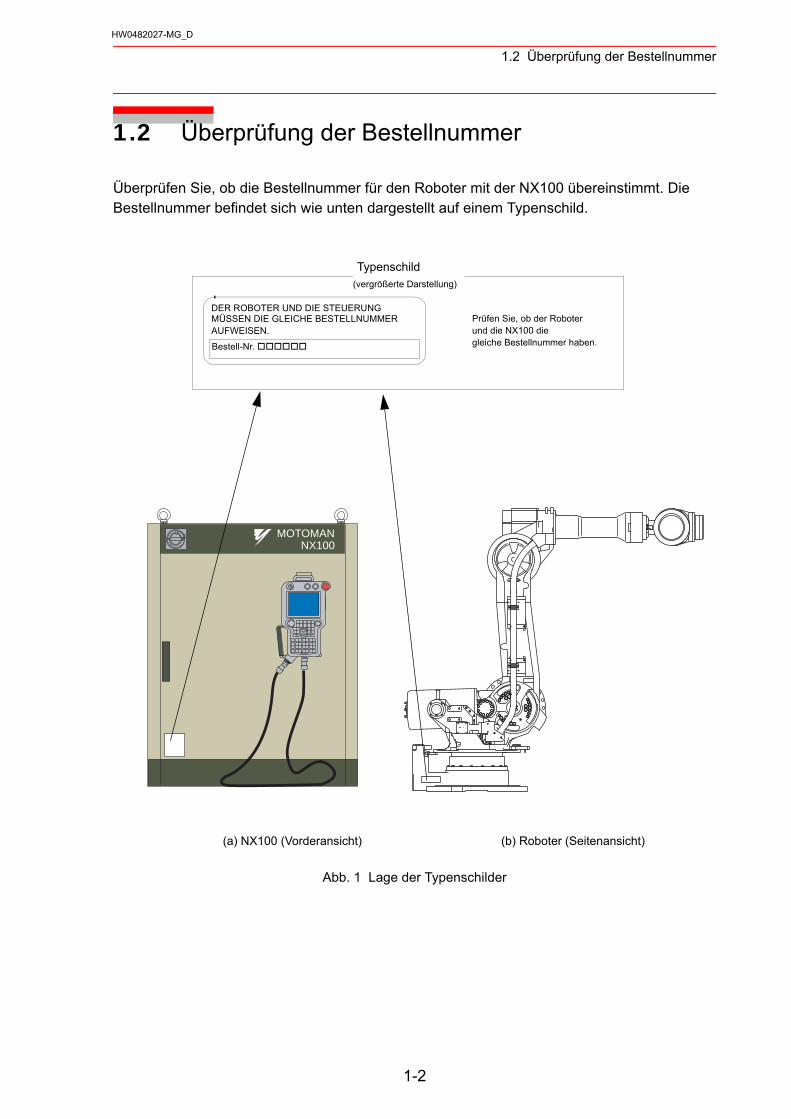
1.2 Überprüfung der Bestellnummer
Überprüfen Sie, ob die Bestellnummer für den Roboter mit der NX100 übereinstimmt. Die Bestellnummer befindet sich wie unten dargestellt auf einem Typenschild.
(a) NX100 (Vorderansicht) (b) Roboter (Seitenansicht)
Abb. 1 Lage der Typenschilder
Typenschild
(vergrößerte Darstellung)
DER ROBOTER UND DIE STEUERUNGMÜSSEN DIE GLEICHE BESTELLNUMMER AUFWEISEN.
Bestell-Nr.
Prüfen Sie, ob der Roboterund die NX100 diegleiche Bestellnummer haben.
MOTOMANNX100
1-2

2.1 TransportmethodeHW0482027-MG_D
2 Transport
2.1 Transportmethode
2.1.1 Transport mit einem Kran
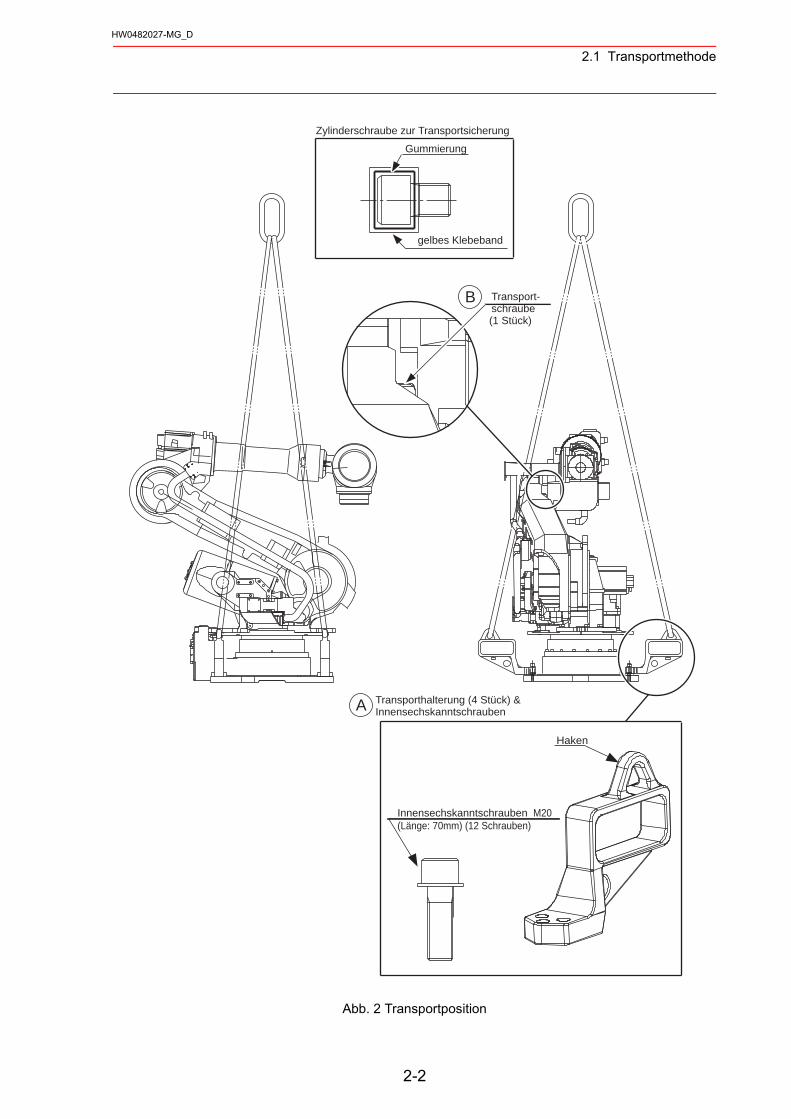
Beim Heben des Roboters aus der Verpackung und dem anschließenden Versetzen ist grundsätzlich ein Kran zu verwenden. Der Roboter sollte mit einem Drahtseil angehoben werden, das durch die Transportsicherungen und Transportschrauben geführt wird.Vergewissern Sie sich, dass der Roboter mit den Transportsicherungen und Transportschrauben befestigt ist, bevor er in der in "Abb. 2 Transportposition" dargestellten Lage angehoben wird.
• Der Transport mittels Gabelstapler, Kran und Hebezeug darf nur durch geeignetes und autorisiertes Personal durchgeführt werden.
• Missachtung kann zu Personen und Sachschäden führen.
• Vermeiden Sie starke Erschütterungen oder Stöße während des Transports.
Das System besteht aus Präzisionsteilen, Fehler während des Transportes und der Installation können sich auch nachträglich auf die Leistung und die Haltbarkeit des Roboters auswirken!
• Prüfen Sie, ob die Ringschrauben sicher befestigt sind.• Der Roboter wiegt einschließlich der Transportsicherungen und Transportschrauben ca.
1280 kg. Verwenden Sie ein Drahtseil mit einer ausreichenden Tragfähigkeit.• Die Transportsicherungen und Transportschrauben stützen den Roboter. Sie dürfen
ausschließlich für den Transport des Roboters verwendet werden.• Montieren Sie die Transportsicherungen und Transportschrauben, wenn der Roboter
transportiert werden soll.• Es dürfen keine Kräfte auf den Roboterarm oder den Motor ausgeübt werden, wenn der
Transport mit einem Kran, Gabelstapler etc. erfolgt, da andernfalls Verletzungsgefahr besteht.
ACHTUNG
HINWEIS
2-1
2.1 Transportmethode
HW0482027-MG_D
Abb. 2 Transportposition
(1 Stück)
B Transport-schraube
gelbes Klebeband
Gummierung
Zylinderschraube zur Transportsicherung
Haken
A Transporthalterung (4 Stück) & Innensechskanntschrauben
Innensechskanntschrauben M20(Länge: 70mm) (12 Schrauben)
2-2

2.2 Transportsicherungen und TransportschraubenHW0482027-MG_D
2.2 Transportsicherungen und Transportschrauben
Der Roboter ist am Punkt A mit Transportsicherungen und Transportschrauben und am Punkt B mit Zylinderschrauben mit Innensechskant ausgestattet ("Abb. 2 Transportposition").
Abb. 3 Transportsicherungen und Transportschrauben
• Die Transportsicherungen am Punkt A sind gelb lackiert.• Die Transportsicherungen am Punkt B: die Zylinderschraube mit Innensechskant ist mit
einem gelben Klebeband umrandet.
Position Bolzentyp Stück
A Innensechskantschraube M20 X 70 mm 12
B Innensechskantschraube M16 X 20 mm 1
Überprüfen Sie vor Einschalten der Spannung, ob die Transportsicherungen und Transporthalter entfernt worden sind. Bewahren Sie die Transportsicherungen und Transporthalter nach dem Entfernen auf, falls der Roboter erneut transportiert werden muss.
A Transporthalterung B Transportschraube
Gummierung
gelbes Klebeband
Haken
Innensechskanntschraube M20(Länge: 70mm) (12 Schrauben)
HINWEIS
2-3
HW0482027-MG_D
3 Installation
• Installieren Sie die Sicherheitseinrichtungen.
Nicht vorhandene Sicherheitseinrichtungen können zu Verletzungen oder Sachbeschädigungen führen.
• Platzieren Sie nach Möglichkeit den Roboter so, dass er im ganz gestreckten
Zustand (weiteste Ausladung) weder Wände noch Sicherheitseinrichtungen noch die NX100-Steuerung berühren oder die NX100-Steuerung erreichen kann.
Missachtung dieser Warnung kann zu Verletzungen oder Sachbeschädigungen führen.
• Der Roboter darf nicht eingeschaltet oder betrieben werden, bevor er fest und sicher installiert wurde.
Der Roboter könnte umfallen und Verletzungen oder Sachschäden verursachen.
Wenn der Roboter an der Wand (hängend) oder an der Decke (überkopf) montiert wird, muss die Grundkonstruktion ausreichend dimensioniert sein, um das Gewicht des Roboters und alle auftretenden Kräfte, aufzunehmen. Ebenfalls sind zusätzliche Sicherheitsmassnahmen zu treffen, um ein Herabfallen des Roboters zu verhindern.
• Nehmen Sie keinen Roboter in Betrieb, der beschädigt oder unvollständig ist.
Missachtung dieser Warnung kann zu Verletzungen oder Sachschäden führen.
• Bevor Sie die Spannung einschalten, vergewissern Sie sich, alle Transportsicherungen und Transportschrauben entfernt zu haben (siehe Abb. 3 "Transportsicherungen und Transportschrauben").
Mißachtung dieser Warnung kann zu Verletzungen oder Sachschäden führen.
WARNUNG
ACHTUNG
3-1
3.1 Installieren der SchutzvorrichtungenHW0482027-MG_D
3.1 Installieren der Schutzvorrichtungen
Für den Betrieb des Roboters sind Sicherheitseinrichtungen zwingend vorgeschrieben. Diese sind entsprechend der Gefährdung und dem Anwendungsfall auszulegen. Sie können aus mechanischen, optischen oder anderen Sicherheitseinrichtungen bestehen und müssen den Gefahrenbereich vollständig umschließen. (ISO10218)
Für die ausreichende Installation von Sicherheitseinrichtungen und die Einhaltung der entsprechenden Normen ist der Betreiber verantwortlich.
Insbesondere verweisen wir auf die EG-Maschinenrichtlinie und die Normen:EN294, EN349, prEN547-1, EN775, EN12100, EN60204-1
MOTOMAN Roboter sind mit Sicherheitseinrichtungen ausgestattet, wie z.B. Sicherheitsgeschwindigkeit und Freigabeschalter DSW, die einen sicheren Umgang mit dem Gerät ermöglichen. Diese dürfen nicht verändert werden.
Für den sicheren Betrieb einer Roboteranlage sind jedoch zusätzliche Sicherheitseinrichtungen zu erstellen. Sollten Sie hierzu Fragen haben oder Informationen benötigen, kontaktieren Sie Ihren MOTOMAN robotec GmbH Vertriebspartner.
An den (die) Bediener des Roboter bzw. der Anlage sind auf Grund der Komplexität besondere Anforderungen zu richten:
- der Bediener muss eine gültige arbeitsmedizinische Untersuchung vorweisen können,- der Bediener darf kein eingeschränktes Sichtfeld haben,- bei dem Bedienen bzw. Einrichten des Roboters besteht absolutes Alkoholverbot,- der Bediener muß sich dem erhötem Gefährdungspotential beim Arbeiten mit und an einer Roboteranlage (z. Bsp.: beim Einrichten von Vorrichtungen, einlegen von Werkstückteile, programmieren (teachen) des Roboters, beheben von Störungen, durchführen von Wartungsarbeiten, usw.) stets Bewußt sein, insbesondere dann, wenn mehrere Roboter in einer Anlage (Zelle integriert sind oder mehrere Roboter synchron gekoppelt sind,- der Bediener muß mit dieser Betriebsanleitung und der Betriebsanleitung der Steuerung vertraut sein,- der Bediener sollte vor der Benutzung auf den jeweiligen Robotertyp geschult sein und muss mindestens eine Einweisung von einer geschulten Person erhalten haben.
WARNUNG
WARNUNG
Sich bewegende Teile können zu Verletzungen führen. Berühren Sie niemals den Roboter
Betreten Sie nie den Arbeitsbereich des Roboters. Halten Sie immer einen Sicherheitsabstand zum Roboter ein.
3-2
3.2 Montageanleitung für den Robotersockel
HW0482027-MG_D
3.2 Montageanleitung für den Robotersockel
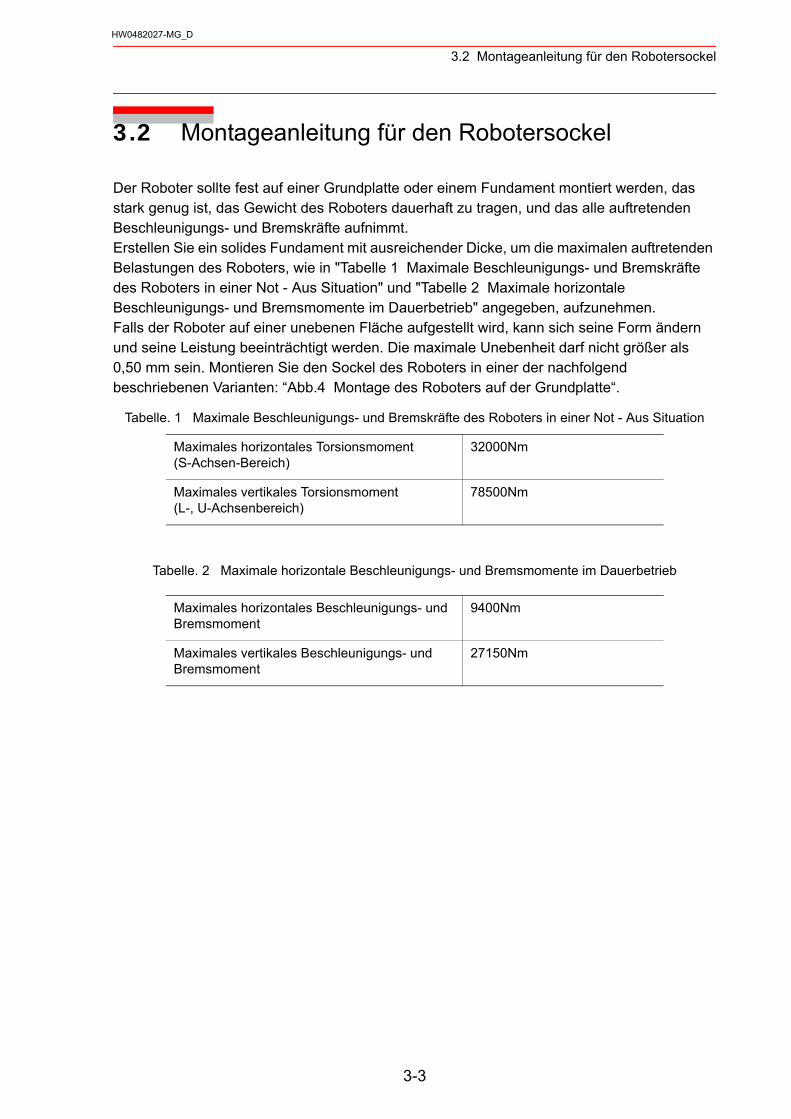
Der Roboter sollte fest auf einer Grundplatte oder einem Fundament montiert werden, das stark genug ist, das Gewicht des Roboters dauerhaft zu tragen, und das alle auftretenden Beschleunigungs- und Bremskräfte aufnimmt.Erstellen Sie ein solides Fundament mit ausreichender Dicke, um die maximalen auftretenden Belastungen des Roboters, wie in "Tabelle 1 Maximale Beschleunigungs- und Bremskräfte des Roboters in einer Not - Aus Situation" und "Tabelle 2 Maximale horizontale Beschleunigungs- und Bremsmomente im Dauerbetrieb" angegeben, aufzunehmen.Falls der Roboter auf einer unebenen Fläche aufgestellt wird, kann sich seine Form ändern und seine Leistung beeinträchtigt werden. Die maximale Unebenheit darf nicht größer als 0,50 mm sein. Montieren Sie den Sockel des Roboters in einer der nachfolgend beschriebenen Varianten: “Abb.4 Montage des Roboters auf der Grundplatte“.
Tabelle. 2 Maximale horizontale Beschleunigungs- und Bremsmomente im Dauerbetrieb
Tabelle. 1 Maximale Beschleunigungs- und Bremskräfte des Roboters in einer Not - Aus Situation
Maximales horizontales Torsionsmoment(S-Achsen-Bereich)
32000Nm
Maximales vertikales Torsionsmoment(L-, U-Achsenbereich)
78500Nm
Maximales horizontales Beschleunigungs- und Bremsmoment
9400Nm
Maximales vertikales Beschleunigungs- und Bremsmoment
27150Nm
3-3
3.3 AufstellortHW0482027-MG_D
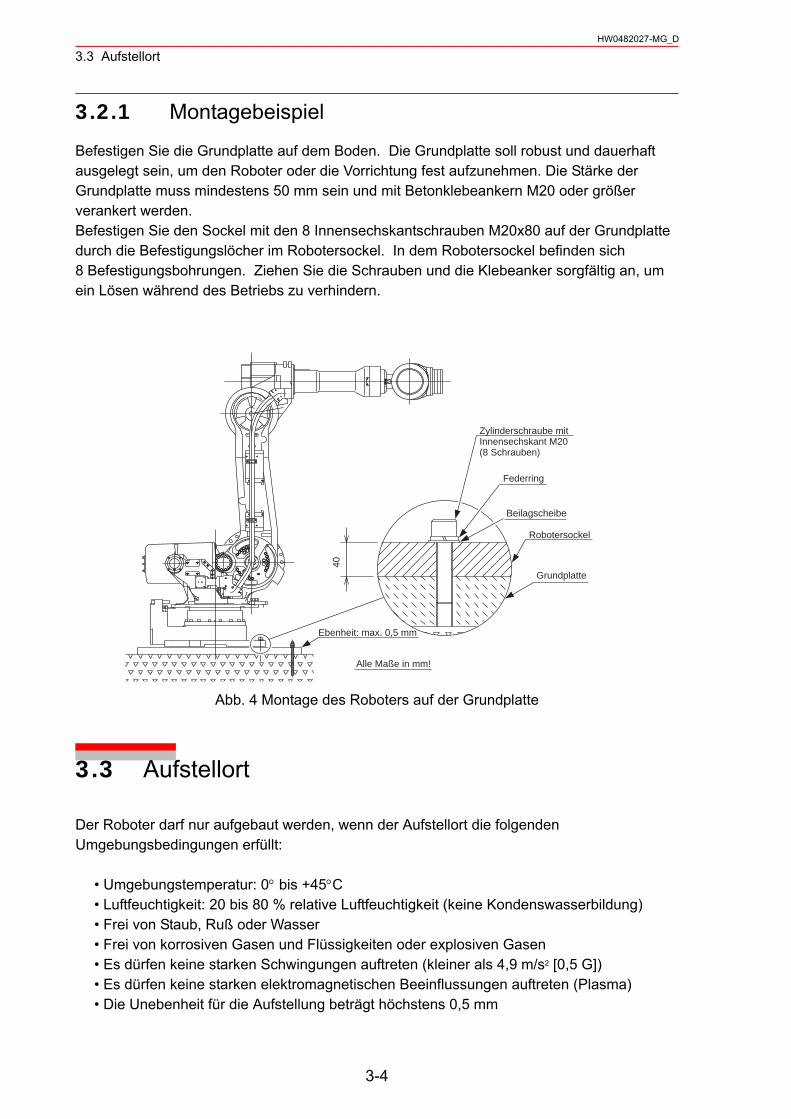
3.2.1 Montagebeispiel
Befestigen Sie die Grundplatte auf dem Boden. Die Grundplatte soll robust und dauerhaft ausgelegt sein, um den Roboter oder die Vorrichtung fest aufzunehmen. Die Stärke der Grundplatte muss mindestens 50 mm sein und mit Betonklebeankern M20 oder größer verankert werden. Befestigen Sie den Sockel mit den 8 Innensechskantschrauben M20x80 auf der Grundplatte durch die Befestigungslöcher im Robotersockel. In dem Robotersockel befinden sich 8 Befestigungsbohrungen. Ziehen Sie die Schrauben und die Klebeanker sorgfältig an, um ein Lösen während des Betriebs zu verhindern.
Abb. 4 Montage des Roboters auf der Grundplatte
3.3 Aufstellort
Der Roboter darf nur aufgebaut werden, wenn der Aufstellort die folgenden Umgebungsbedingungen erfüllt:
• Umgebungstemperatur: 0° bis +45°C• Luftfeuchtigkeit: 20 bis 80 % relative Luftfeuchtigkeit (keine Kondenswasserbildung)• Frei von Staub, Ruß oder Wasser• Frei von korrosiven Gasen und Flüssigkeiten oder explosiven Gasen• Es dürfen keine starken Schwingungen auftreten (kleiner als 4,9 m/s2 [0,5 G])• Es dürfen keine starken elektromagnetischen Beeinflussungen auftreten (Plasma)• Die Unebenheit für die Aufstellung beträgt höchstens 0,5 mm
Ebenheit: max. 0,5 mm
Zylinderschraube mit Innensechskant M20(8 Schrauben)
Federring
Beilagscheibe
Robotersockel
Grundplatte
40
Alle Maße in mm!
3-4
HW0482027-MG_D
4 Elektrische Anschlüsse
• Der Erdungswiderstand darf maximal 100 Ω betragen.
Missachtung dieser Warnung kann zu einem Brand oder Stromschlägen führen.
• Bevor Sie die Anschlüsse herstellen, vergewissern Sie sich, dass die Hauptspannungsversorgung ausgeschaltet ist, und bringen Sie ein Warnschild an. (z. B. KEINE SPANNUNG EINSCHALTEN.)
Missachtung dieser Warnung kann zu einem Brand oder Stromschlägen führen.
• Der elektrische Anschluss darf nur vom Fachpersonal erfolgen.• Die Anschlussspannung der Steuerung beträgt 3 x 200V bei 50/60Hz.• Der Anschluss an andere Stromnetze muss über einen entsprechenden
Zwischentransformator erfolgen.• Beim Anschluss der Systeme sind die entsprechenden Sicherheitsvorschriften,
insbesondere die VDE 0100 und EN 60204 sowie, die Vorschriften der örtlichen EVU’s, zu beachten.
• Bei falschen Netzanschluss kann an der Steuerung erhebliche Sachschäden entstehen.
Missachtung dieses Warnungen kann zu einem Brand oder elektrischem Schlag führen.
WARNUNG
ACHTUNG
4-1
4.1 Erdung
HW0482027-MG_D
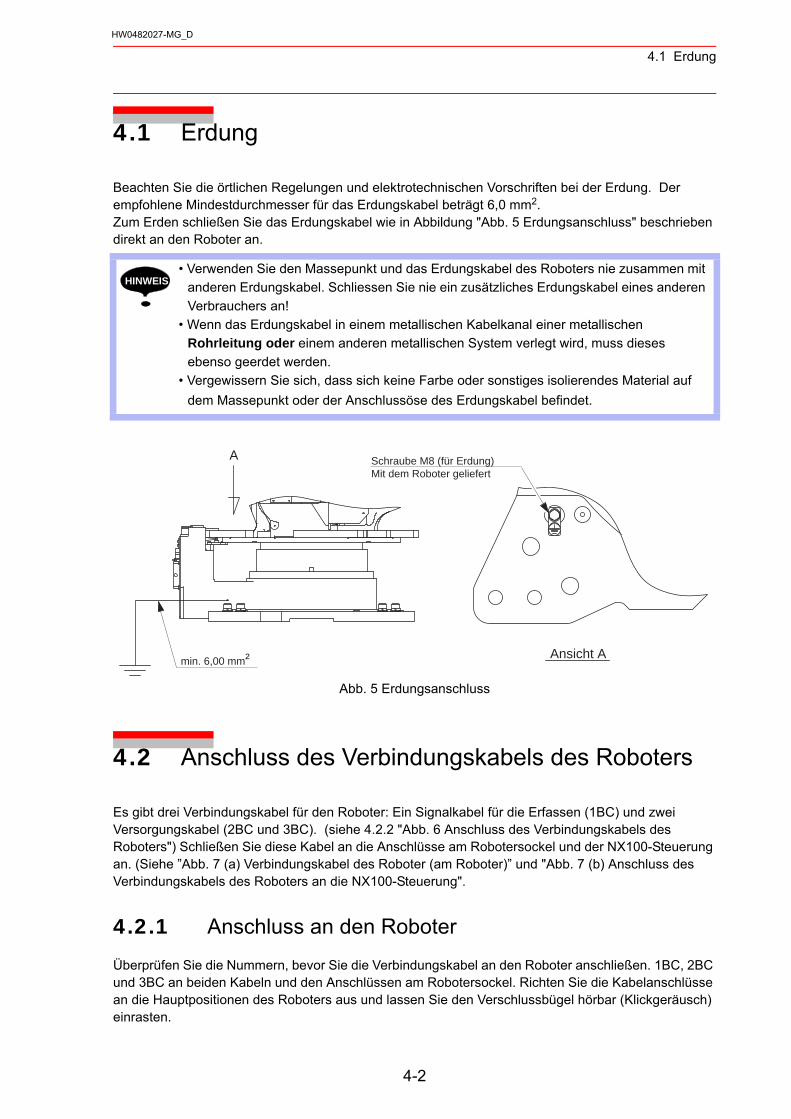
4.1 Erdung
Beachten Sie die örtlichen Regelungen und elektrotechnischen Vorschriften bei der Erdung. Der empfohlene Mindestdurchmesser für das Erdungskabel beträgt 6,0 mm2. Zum Erden schließen Sie das Erdungskabel wie in Abbildung "Abb. 5 Erdungsanschluss" beschrieben direkt an den Roboter an.
Abb. 5 Erdungsanschluss
4.2 Anschluss des Verbindungskabels des Roboters
Es gibt drei Verbindungskabel für den Roboter: Ein Signalkabel für die Erfassen (1BC) und zwei Versorgungskabel (2BC und 3BC). (siehe 4.2.2 "Abb. 6 Anschluss des Verbindungskabels des Roboters") Schließen Sie diese Kabel an die Anschlüsse am Robotersockel und der NX100-Steuerung an. (Siehe ”Abb. 7 (a) Verbindungskabel des Roboter (am Roboter)” und "Abb. 7 (b) Anschluss des Verbindungskabels des Roboters an die NX100-Steuerung".
4.2.1 Anschluss an den Roboter
Überprüfen Sie die Nummern, bevor Sie die Verbindungskabel an den Roboter anschließen. 1BC, 2BC und 3BC an beiden Kabeln und den Anschlüssen am Robotersockel. Richten Sie die Kabelanschlüsse an die Hauptpositionen des Roboters aus und lassen Sie den Verschlussbügel hörbar (Klickgeräusch) einrasten.
• Verwenden Sie den Massepunkt und das Erdungskabel des Roboters nie zusammen mit anderen Erdungskabel. Schliessen Sie nie ein zusätzliches Erdungskabel eines anderen Verbrauchers an!
• Wenn das Erdungskabel in einem metallischen Kabelkanal einer metallischen Rohrleitung oder einem anderen metallischen System verlegt wird, muss dieses ebenso geerdet werden.
• Vergewissern Sie sich, dass sich keine Farbe oder sonstiges isolierendes Material auf dem Massepunkt oder der Anschlussöse des Erdungskabel befindet.
HINWEIS
A
min. 6,00 mm² Ansicht A
Schraube M8 (für Erdung)Mit dem Roboter geliefert
4-2

4.2 Anschluss des Verbindungskabels des RobotersHW0482027-MG_D
4.2.2 Anschluss an die NX100-Steuerung
Schließen Sie zuerst das Kabel 2BC an, dann die Kabel 3BC und 1BC, nachdem Sie die Nummern überprüft haben. Die Nummern befinden sich auf beiden Verbindungskabeln des Roboters und den Steckern der NX100-Steuerung. Richten Sie die Kabelanschlüsse an die Hauptpositionen der NX100-Steuerung aus und lassen Sie den Verschlussbügel hörbar (Klickgeräusch) einrasten.
Abb. 6 Anschluss des Verbindungskabels des Roboters
Rückseite des NX-Steuerschrankes
X 4
zum
Rob
oter
zum
Rob
oter
X 3
X 2
X 1
zum
Rob
oter
X 3
X 2
X 1
X 1
X 3
X 2
2 BC
3 BC
1 BC
4-3

4.2 Anschluss des Verbindungskabels des Roboters
HW0482027-MG_D
Abb. 7 (a) Verbindungskabel des Roboters (auf der Roboterseite)
Abb. 7 (b) Anschluss des Verbindungskabels des Roboters an die NX100-Steuerung
1BC 3BC
S1AIRA
2BC
3BCmolexmolexmolex
1BC
2BC
Einzelheiten Steckverbindungen(Roboterseite) A
Steckercodierungen
AnschlussProgrammierhandgerät
X81
4-4
5.1 Technische DatenHW0482027-MG_D
5 Spezifikationen
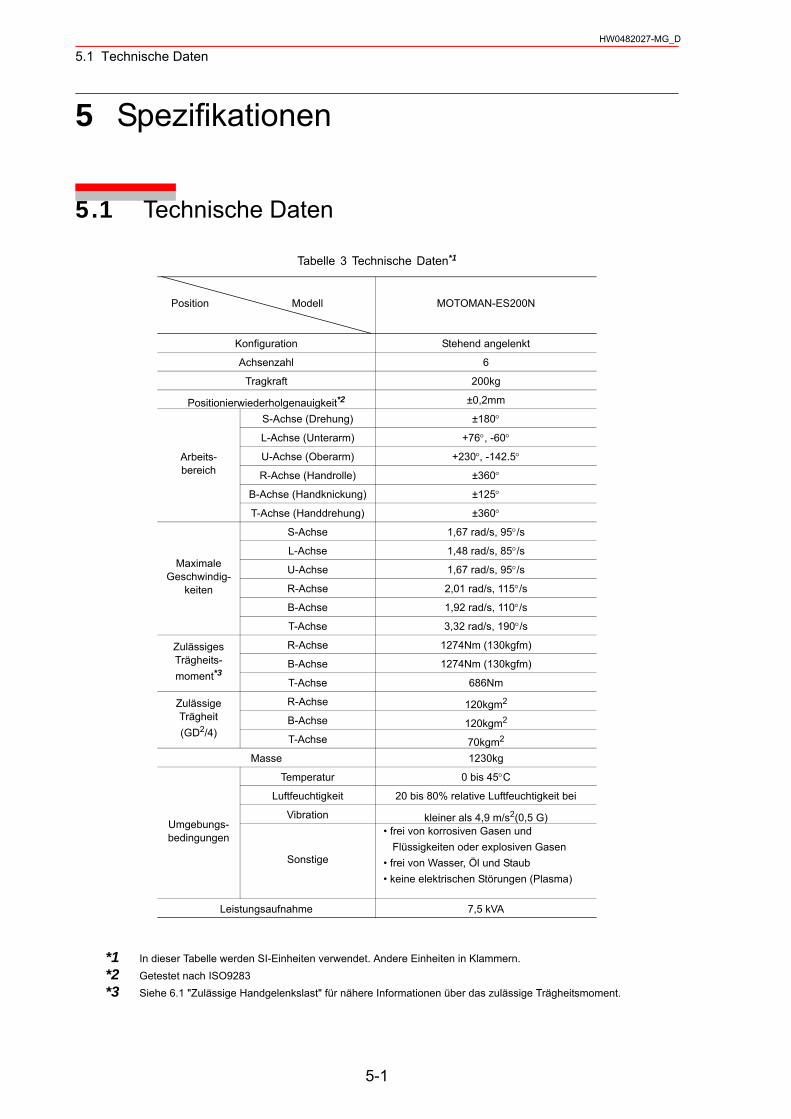
5.1 Technische Daten
*1 In dieser Tabelle werden SI-Einheiten verwendet. Andere Einheiten in Klammern.*2 Getestet nach ISO9283*3 Siehe 6.1 "Zulässige Handgelenkslast" für nähere Informationen über das zulässige Trägheitsmoment.
Tabelle 3 Technische Daten*1
Position Modell MOTOMAN-ES200N
Konfiguration Stehend angelenkt
Achsenzahl 6
Tragkraft 200kg
Positionierwiederholgenauigkeit*2 ±0,2mm
Arbeits-bereich
S-Achse (Drehung) ±180°
L-Achse (Unterarm) +76°, -60°
U-Achse (Oberarm) +230°, -142.5°
R-Achse (Handrolle) ±360°
B-Achse (Handknickung) ±125°
T-Achse (Handdrehung) ±360°
Maximale Geschwindig-
keiten
S-Achse 1,67 rad/s, 95°/s
L-Achse 1,48 rad/s, 85°/s
U-Achse 1,67 rad/s, 95°/s
R-Achse 2,01 rad/s, 115°/s
B-Achse 1,92 rad/s, 110°/s
T-Achse 3,32 rad/s, 190°/s
ZulässigesTrägheits-moment*3
R-Achse 1274Nm (130kgfm)
B-Achse 1274Nm (130kgfm)
T-Achse 686Nm
ZulässigeTrägheit(GD2/4)
R-Achse 120kgm2
B-Achse 120kgm2
T-Achse 70kgm2
Masse 1230kg
Umgebungs-bedingungen
Temperatur 0 bis 45°C
Luftfeuchtigkeit 20 bis 80% relative Luftfeuchtigkeit bei
Vibration kleiner als 4,9 m/s2(0,5 G)
Sonstige
• frei von korrosiven Gasen und Flüssigkeiten oder explosiven Gasen
• frei von Wasser, Öl und Staub• keine elektrischen Störungen (Plasma)
Leistungsaufnahme 7,5 kVA
5-1
5.2 Teilebezeichnungen und Arbeitsachsen
HW0482027-MG_D
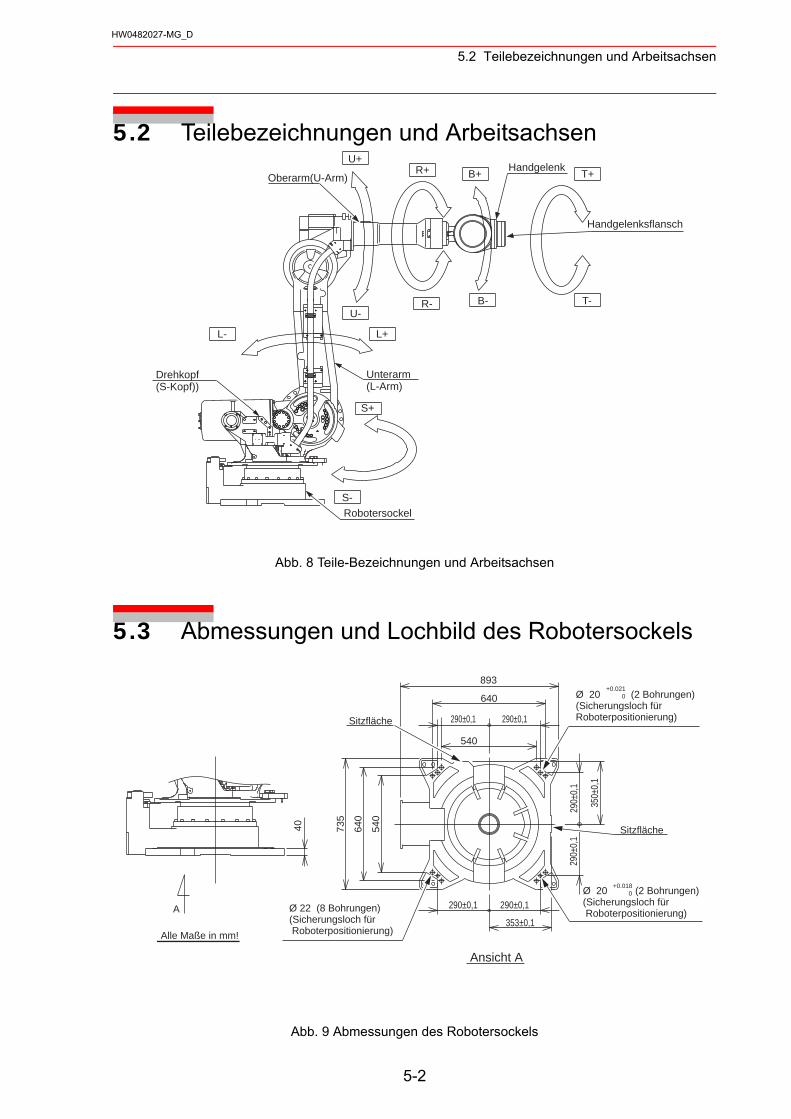
5.2 Teilebezeichnungen und Arbeitsachsen
Abb. 8 Teile-Bezeichnungen und Arbeitsachsen
5.3 Abmessungen und Lochbild des Robotersockels
Abb. 9 Abmessungen des Robotersockels
Oberarm(U-Arm)
U+R+ B+
B-R-U-
L+L-
T+
T-
Handgelenk
Handgelenksflansch
S+
S-
Unterarm(L-Arm)
Robotersockel
Drehkopf(S-Kopf))
Ansicht A
Sitzfläche
Sitzfläche
Ø 22 (8 Bohrungen)(Sicherungsloch für Roboterpositionierung)
Ø 20 (2 Bohrungen)(Sicherungsloch für Roboterpositionierung)
+0.021 0
Ø 20 (2 Bohrungen)(Sicherungsloch für Roboterpositionierung)
+0.018 0
350±
0,1
290±
0,1
290±
0,1
640
290±0,1
893
290±0,1
540
290±0,1290±0,1
540
640
735
353±0,1
40
A
Alle Maße in mm!
5-2

5.4 Abmessungen und maximaler Arbeitsbereich des P-PunktesHW0482027-MG_D
5.4 Abmessungen und maximaler Arbeitsbereich des P-Punktes
(Diese Seite muss durch ”A3_Chapter 5.4.fm” in der pdf-Datei ersetzt werden.)Abb. 10 Abmessungen und maximaler Arbeitsbereich des P-Punktes
5-3
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
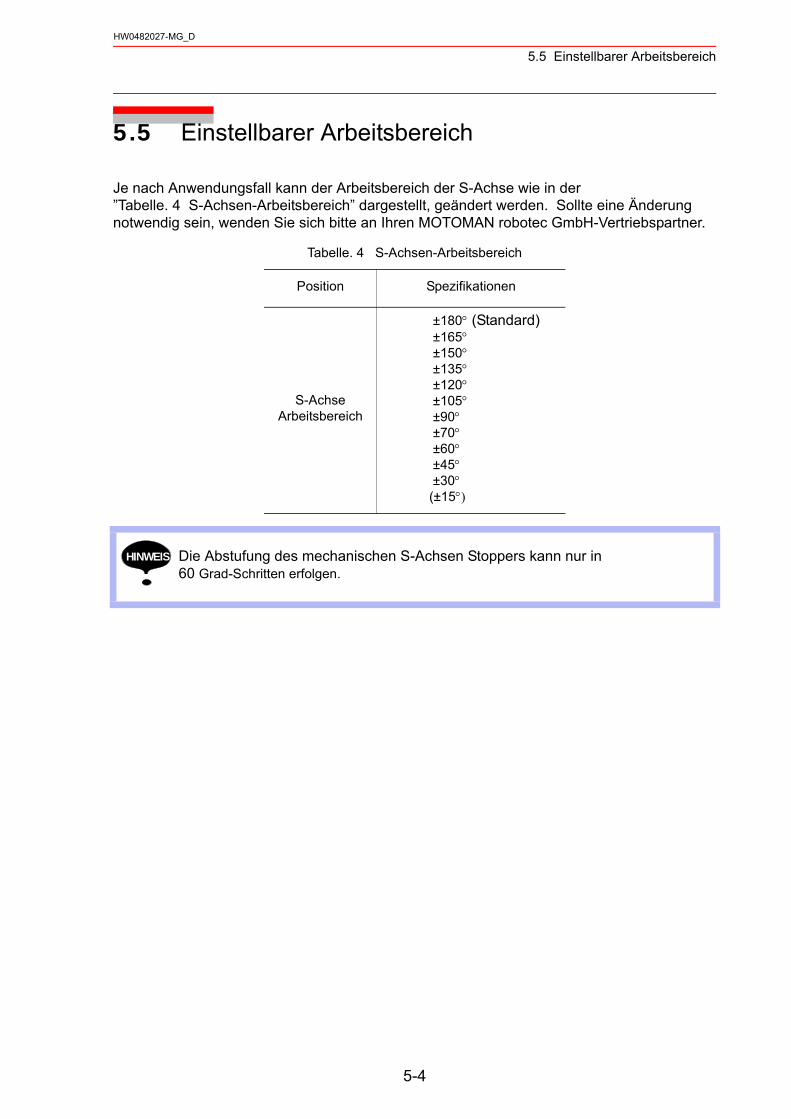
5.5 Einstellbarer Arbeitsbereich
Je nach Anwendungsfall kann der Arbeitsbereich der S-Achse wie in der ”Tabelle. 4 S-Achsen-Arbeitsbereich” dargestellt, geändert werden. Sollte eine Änderung notwendig sein, wenden Sie sich bitte an Ihren MOTOMAN robotec GmbH-Vertriebspartner.
Tabelle. 4 S-Achsen-Arbeitsbereich
Position Spezifikationen
S-AchseArbeitsbereich
±180° (Standard) ±165° ±150° ±135° ±120° ±105° ±90° ±70° ±60° ±45° ±30° (±15°)
Die Abstufung des mechanischen S-Achsen Stoppers kann nur in 60 Grad-Schritten erfolgen.
HINWEIS
5-4
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
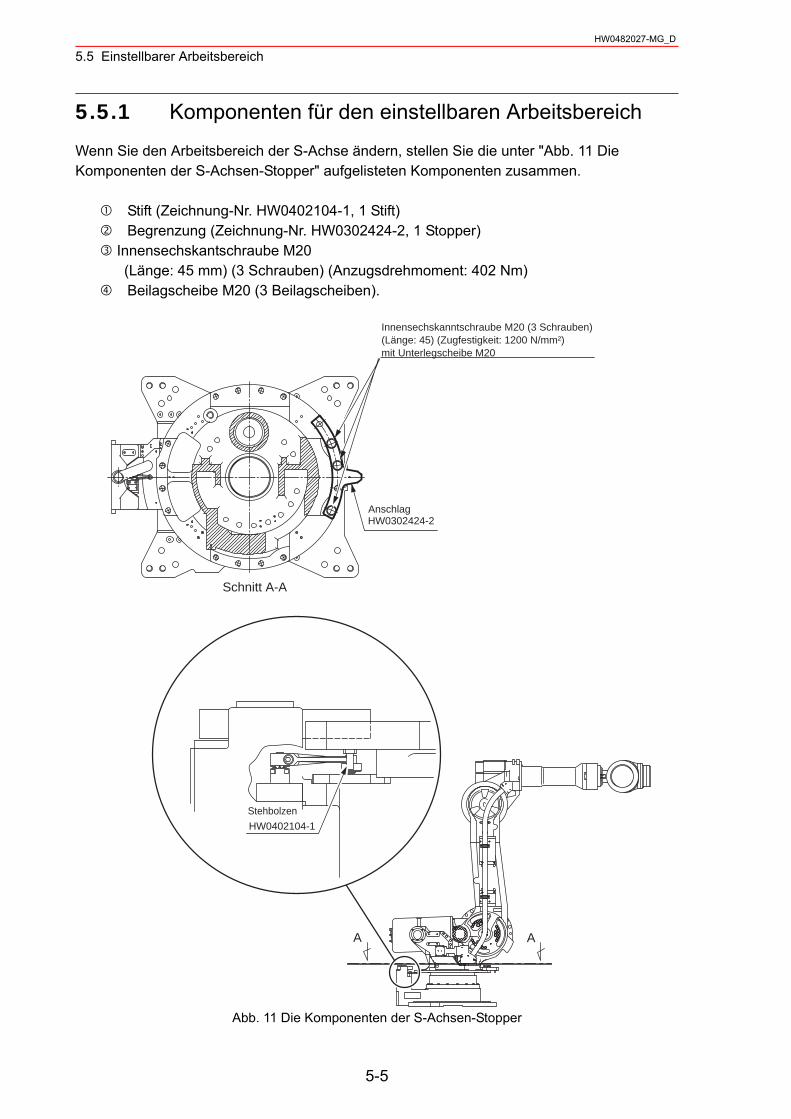
5.5.1 Komponenten für den einstellbaren Arbeitsbereich
Wenn Sie den Arbeitsbereich der S-Achse ändern, stellen Sie die unter "Abb. 11 Die Komponenten der S-Achsen-Stopper" aufgelisteten Komponenten zusammen.
Stift (Zeichnung-Nr. HW0402104-1, 1 Stift) Begrenzung (Zeichnung-Nr. HW0302424-2, 1 Stopper) Innensechskantschraube M20 (Länge: 45 mm) (3 Schrauben) (Anzugsdrehmoment: 402 Nm) Beilagscheibe M20 (3 Beilagscheiben).
Abb. 11 Die Komponenten der S-Achsen-Stopper
HW0302424-2
Schnitt A-A
Innensechskanntschraube M20 (3 Schrauben)(Länge: 45) (Zugfestigkeit: 1200 N/mm²)mit Unterlegscheibe M20
Anschlag
HW0402104-1Stehbolzen
A A
5-5

5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
5.5.2 Einbau des mechanischen Stoppers
• Montieren Sie den mechanischen Stopper der S-Achse (Zeichnung-Nr. HW0302424-2) so, dass der Stehbolzen, wie unter "Abb. 11 Die Komponenten der S-Achsen-Stopper" dargestellt, Kopf nach unten verwendet wird (Zeichnung-Nr. HW0402104-1)"Abb. 11 Die Komponenten der S-Achsen-Stopper".
• Wenn Sie den Stehbolzen in die Begrenzung stecken, tragen Sie UNBEDINGT Loctite 242 an der Schraubfläche des Stifts auf.
• Befestigen Sie die Begrenzung am S-Kopf mit Innensechskantschrauben M20 (Länge: 45 mm, 3 Schrauben) und ziehen Sie die Schraube mit einem Anzugsdrehmoment von 402 Nm (Schraubenqualität: 12.9 ) an.
• Um mechanische Fehler zu vermeiden, achten Sie auf die Angaben in der "Tabelle. 5 Der einstellbare Winkel für den S-Achsenstopper" beim Einbau der mechanischen S-Achsen-Begrenzung. Die Begrenzung kann in Abständen von 15 Grad montiert werden.
• Prüfen Sie, ob beide Seiten des Anschlags mit den Innensechskantschrauben wie in"Abb. 12 Richtig montiert" dargestellt im Hinblick auf die Kraftbegrenzung der Einheit montiert sind.
• Siehe Abbildungen: ”Abb.13” beim Justieren des Einstellwinkels der mechanischen S-Achsen-Stopper. Falls die mechanischen S-Achsen-Stopper mit dem umgekehrten Winkel eingebaut werden, siehe Beispiele in den Abbildungen: ”Abb.13”, die Maschine muss symmetrisch zu den Abbildugen sein.
• Wie in den Abbildungen: ”Abb.13”, die Komponente ist reversibel, so dass beide Seiten der Maschine an der Begrenzung befestigt werden mit der Ausnahme der Winkel ±30, ±60, ±120, ±150 Grad. Falls Sie Schwierigkeiten haben, die Maschinen auf der Begrenzung einzustellen, wie in "Abb. 11 Die Komponenten der S-Achsen-Stopper" gezeigt wird, wechseln Sie die Begrenzungsseite und versuchen Sie es erneut.
.
Abb. 12 Richtig montiert
Innensechskant-schraube
Falsch montiert Richtig montiert
Innensechskant-schraube
5-6
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
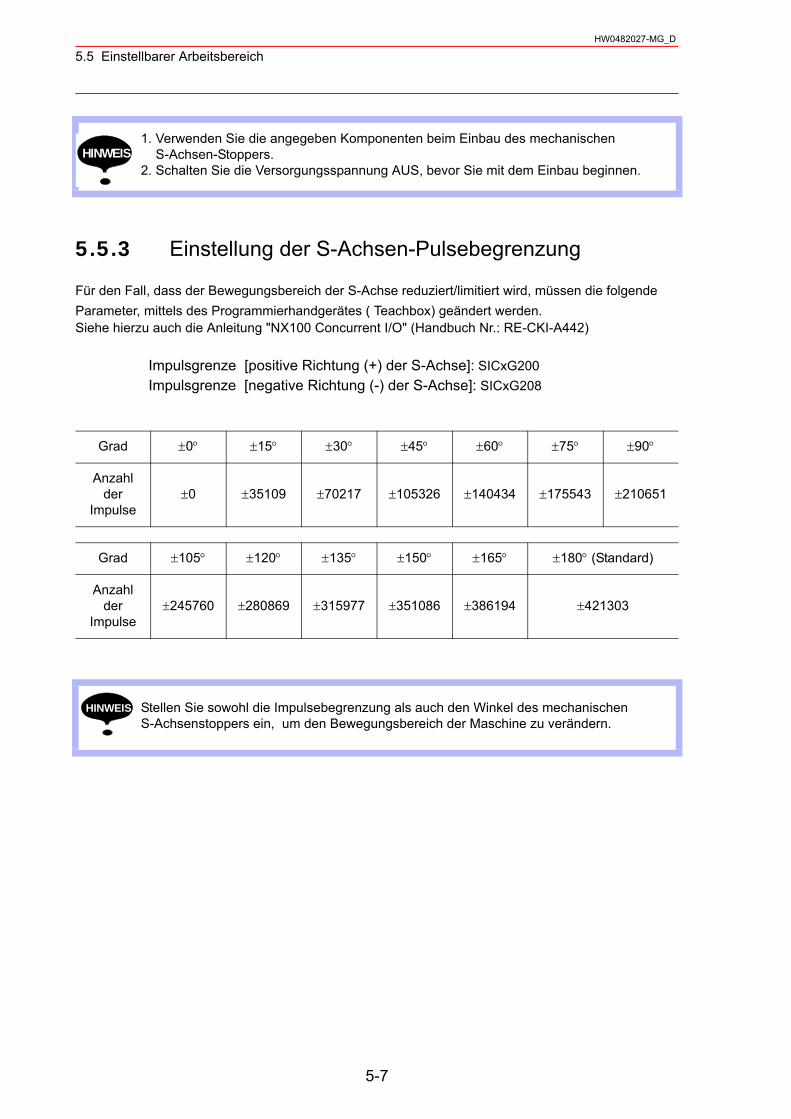
5.5.3 Einstellung der S-Achsen-Pulsebegrenzung
Für den Fall, dass der Bewegungsbereich der S-Achse reduziert/limitiert wird, müssen die folgende Parameter, mittels des Programmierhandgerätes ( Teachbox) geändert werden.Siehe hierzu auch die Anleitung "NX100 Concurrent I/O" (Handbuch Nr.: RE-CKI-A442)
Impulsgrenze [positive Richtung (+) der S-Achse]: SICxG200 Impulsgrenze [negative Richtung (-) der S-Achse]: SICxG208
1. Verwenden Sie die angegeben Komponenten beim Einbau des mechanischen S-Achsen-Stoppers.2. Schalten Sie die Versorgungsspannung AUS, bevor Sie mit dem Einbau beginnen.
Grad ±0° ±15° ±30° ±45° ±60° ±75° ±90°
Anzahl der
Impulse±0 ±35109 ±70217 ±105326 ±140434 ±175543 ±210651
Grad ±105° ±120° ±135° ±150° ±165° ±180° (Standard)
Anzahl der
Impulse±245760 ±280869 ±315977 ±351086 ±386194 ±421303
Stellen Sie sowohl die Impulsebegrenzung als auch den Winkel des mechanischen S-Achsenstoppers ein, um den Bewegungsbereich der Maschine zu verändern.
HINWEIS
HINWEIS
5-7

5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
Tabelle. 5 Der einstellbare Winkel für den S-Achsenstopper
180
165
150
135
120
105
9075
6045
3015
0-1
5-3
0-4
5-6
0-7
5-9
0-1
05-1
20-1
35-1
50-1
65-1
80-1
80-1
65-1
50-1
35-1
20-1
05 -90
-75
-60
-45
-30
-15 0 15 30 45 60 75 90 105
120
135
150
165
180
…E
inst
ellb
arer
Win
kel
…N
icht
ein
stel
lbar
er W
inke
l
Der
Win
kel f
ür d
en S
-Ach
sens
topp
er in
der
+ R
icht
ung
Der Winkel für die S-Achsenstopper in der - Richtung
Der
ein
stel
lbar
e W
inke
l für
den
S-A
chse
nsto
pper
Tabe
lle 5
: Der
ein
stel
lbar
e W
inke
l für
S-A
chse
nbeg
renz
ung"
zei
gt d
en W
inke
lber
eich
,
inn
erha
lb d
esse
n di
e S
-Ach
se fü
r die
+ u
nd -
Ric
htun
gsw
inke
l ein
zust
elle
n is
t.H
inw
eis:
Die
ho
rizo
nta
le A
chse
in d
er T
abel
le z
eig
t d
ie fü
r d
ie +
Ric
htu
ng
der
S-A
chse
ein
ges
tellt
en W
inke
l.
Die
ver
tika
le A
chse
in d
er T
abel
le z
eig
t d
ie fü
r d
ie -R
ich
tun
g d
er S
-Ach
se e
ing
este
llten
Win
kel.
(
z. B
. kan
n d
ie S
-Ach
se in
ein
em W
inke
l zw
isch
en +
180°
un
d -1
80°
ein
ges
tellt
wer
den
, jed
och
n
ich
t in
ein
em W
inke
l zw
isch
en +
180°
un
d -1
65°.
)
5-8

5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
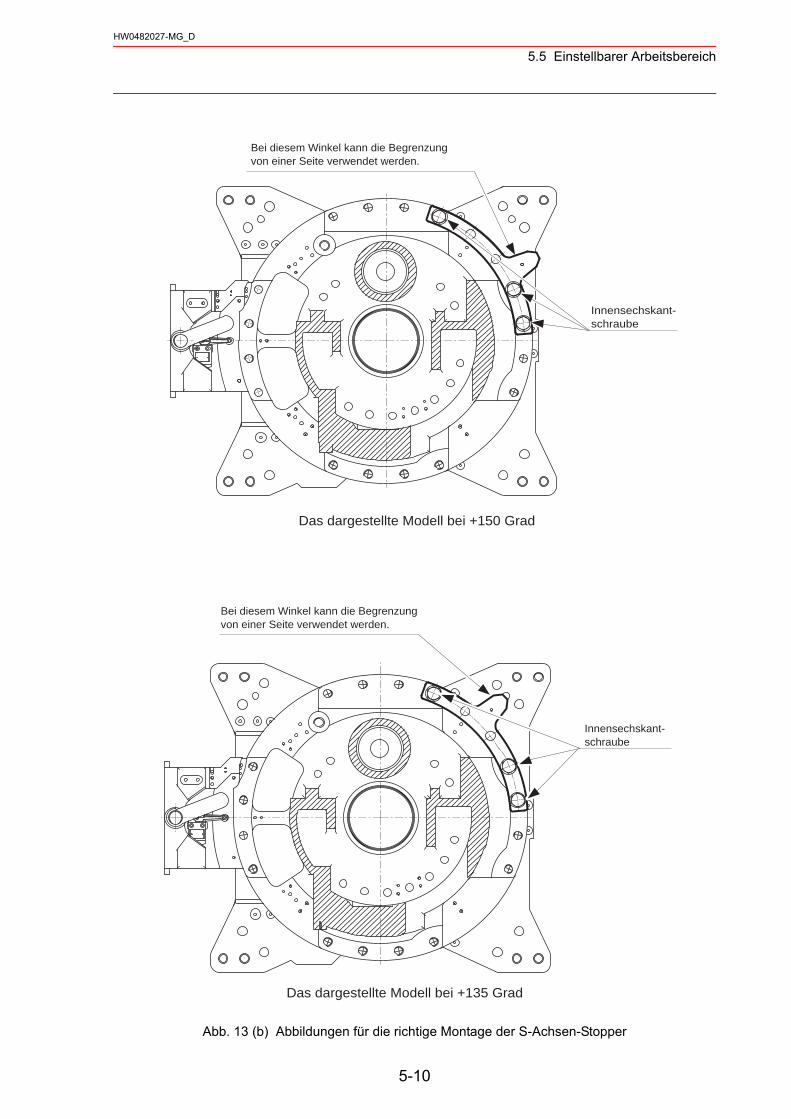
Montage des S-Achsen Stoppers in unterschiedlichen Winkeln
Abb. 13 (a) Abbildungen für die richtige Montage der S-Achsen-Stopper
Das dargestellte Modell bei +165 Grad
Die Begrenzung kann von beiden Seiten verwendet werden
Innensechskant-schraube
Die Begrenzung kann von beiden Seiten verwendet werden
Das dargestellte Modell bei +180 Grad
Innensechskant-schraube
5-9
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
Abb. 13 (b) Abbildungen für die richtige Montage der S-Achsen-Stopper
Das dargestellte Modell bei +135 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskant-schraube
Das dargestellte Modell bei +150 Grad
Innensechskant-schraube
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
5-10
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
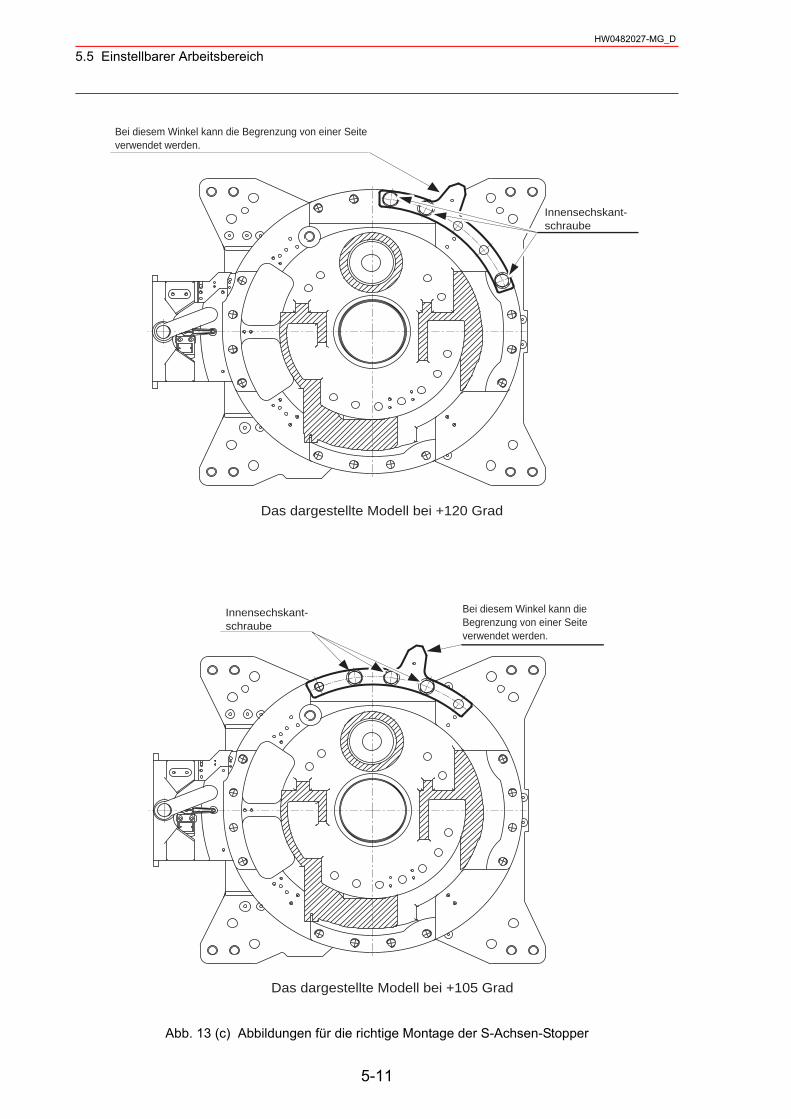
Abb. 13 (c) Abbildungen für die richtige Montage der S-Achsen-Stopper
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskant-schraube
Das dargestellte Modell bei +105 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Das dargestellte Modell bei +120 Grad
Innensechskant-schraube
5-11

5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
Abb. 13 (d) Abbildungen für die richtige Montage der S-Achsen-Stopper
Das dargestellte Modell bei + 90 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskantschraube
Das dargestellte Modell bei + 75 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskantschraube
5-12
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
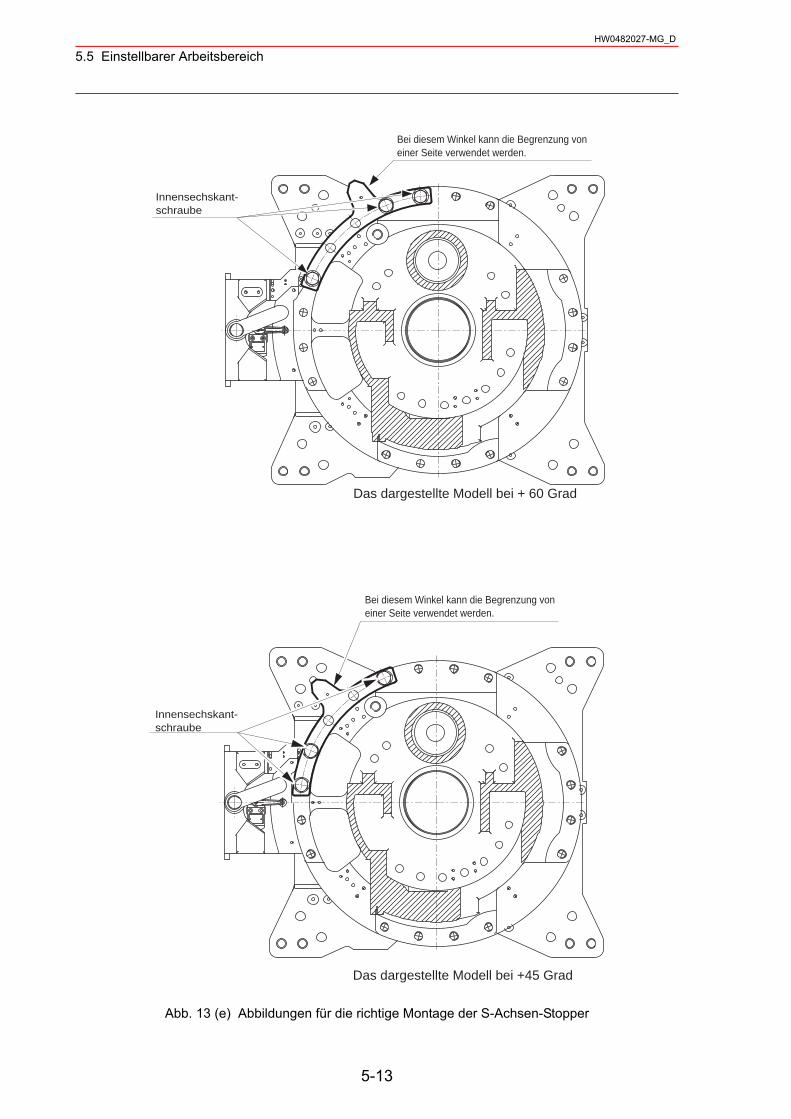
Abb. 13 (e) Abbildungen für die richtige Montage der S-Achsen-Stopper
Innensechskant-schraube
Das dargestellte Modell bei + 60 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskant-schraube
Das dargestellte Modell bei +45 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
5-13

5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
Abb. 13 (f) Abbildungen für die richtige Montage der S-Achsen-Stopper
Innensechskant-schraube
Das dargestellte Modell bei +15 Grad
Innensechskant-schraube
Das dargestellte Modell bei +30 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
5-14
5.5 Einstellbarer ArbeitsbereichHW0482027-MG_D
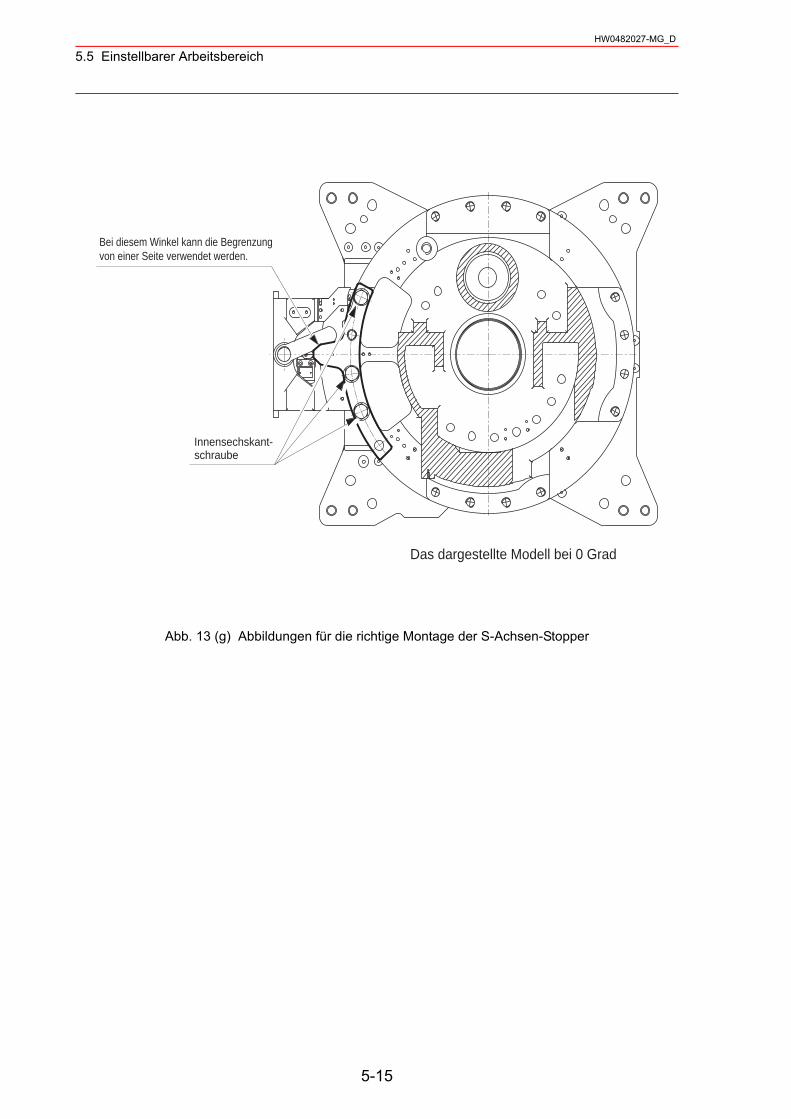
Abb. 13 (g) Abbildungen für die richtige Montage der S-Achsen-Stopper
Das dargestellte Modell bei 0 Grad
Bei diesem Winkel kann die Begrenzung von einer Seite verwendet werden.
Innensechskant-schraube
5-15

6.1 Zulässige Handgelenkslast
HW0482027-MG_D
6 Zulässige Last für die Handachse und den Handgelenksflansch
6.1 Zulässige HandgelenkslastDie zulässige Handgelenkslast einschließlich des Gewichts der Vorrichtung/Greifers ist:
• YR-ES200N-A00, -A01: Maximum 200kgWenn auf die Hand Kraft statt Last ausgeübt wird, muss die Kraft bei der R-, B- und T-Achse innerhalb des in "Tabelle. 6 Zulässiges Gesamtdrehmoment und Gesamtträgheitsmoment " angegebenen Bereichs liegen. Wenden Sie sich an Ihren MOTOMAN robotec GmbH-Vertriebspartner für nähere Informationen oder Hilfe.
Ist die Volumenlast klein, beziehen Sie sich bitte auf die Handlasten in der "Abb. 14 Handlasten".Die zulässige Gesamtträgheit wird berechnet, wenn das Moment seinen maximalen Wert erreicht hat. Wenden Sie sich an MOTOMAN robotec GmbH, wenn nur das Trägheitsmoment oder das Lastmoment klein und das Trägheitsmoment groß ist. Wenden Sie sich an Ihren MOTOMAN robotec GmbH-Vertriebspartner, wenn die Lastmasse mit einer externen Kraft kombiniert wird.
Abb. 14 Handlasten
Tabelle. 6 Zulässiges Gesamtdrehmoment und Gesamtträgheitsmoment
Modell Achse Drehmoment Nm GD2/4 Gesamtträgheitsmoment kgm2
YR-ES200N-A00, -A01R-AchseB-AchseT-Achse
12741274686
12012070
200
P-Punkt
1000
LT(mm)
14001200 LB(mm)
80kg80kg80kg
100kg100kg100kg
800400 600600600 100010001000
800
600
400
200
400
200
600
800
1000
LT(mm)B-Achse Drehungsmittelpunkt
T-, R-AchseDrehungsmittelpunkt
60kg60kg60kg
130kg130kg130kg165kg165kg165kg
200kg200kg200kg
6-1

6.2 HandgelenksflanschHW0482027-MG_D
6.2 Handgelenksflansch
Die Abmaße des Handgelenksflansches sind in der "Abb. 15 Handgelenksflansch" ersichtlich. Damit die Nullstellungsmarkierungen ständig einzusehen sind, darf das Werkzeug nur mit dem inneren Durchmesser angeflanscht werden. Die innere und äußere Verschraubungstiefe darf höchsten 8 mm betragen.
Abb. 15 Handgelenksflansch
Entfernen Sie vor der Montage eines Werkzeuges am Flansch die gelbe, antikorrosive Beschichtung. Am besten eignet sich dazu Nitroverdünnung oder ein Leichtöl.
Ø 10 (2 Bohrungen) (Tiefe: 8 mm)
Ausrichtungs-markierung
+0,015 0
Ø 1
60 0 -0
,025
Ø 6
3 +0
,030
0
8
8
P.C.D.125
P.C.D.92
Gewindebohrung M10 (6 Bohrungen), (Tiefe: 12 mm)
Gewindebohrung M10 (6 Bohrungen), (Tiefe: 12 mm)
Alle Maße in mm!
Ø 9 (2Bohrungen) (Tiefe: 8 mm)+0,015 0
HINWEIS
6-2
7.1 Installation von ZubehörHW0482027-MG_D
7 Systemanwendungen
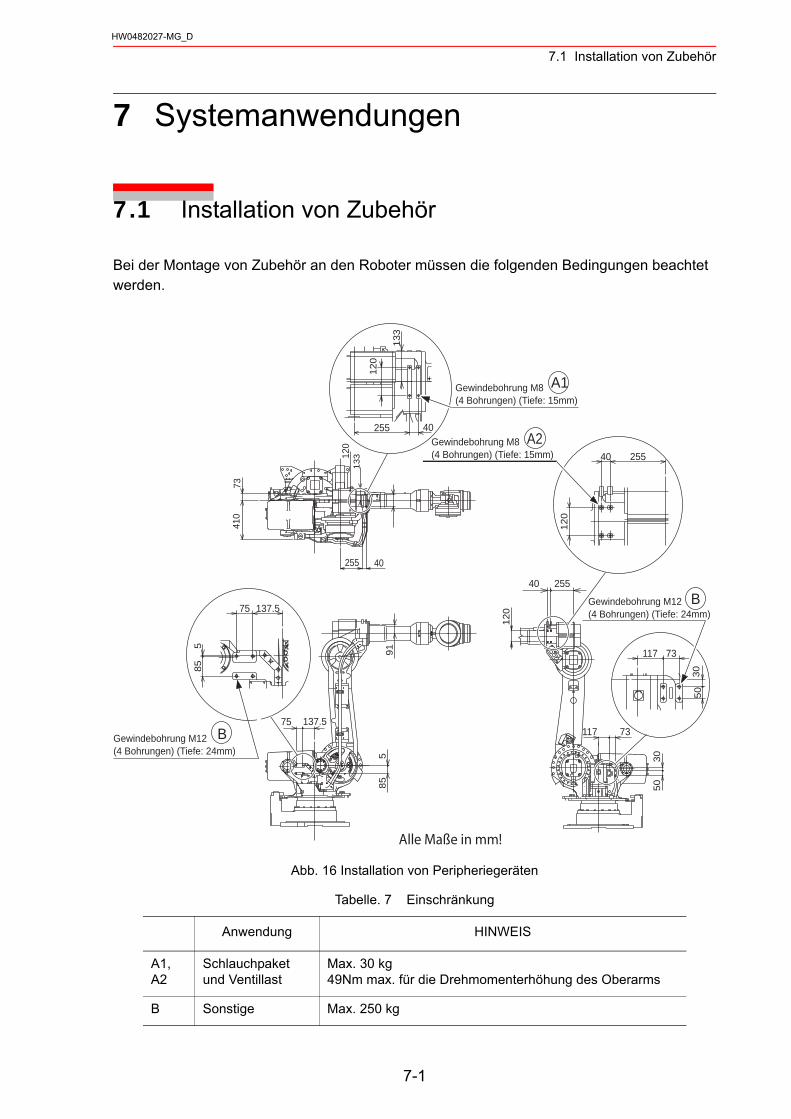
7.1 Installation von Zubehör
Bei der Montage von Zubehör an den Roboter müssen die folgenden Bedingungen beachtet werden.
Abb. 16 Installation von Peripheriegeräten
Tabelle. 7 Einschränkung
Anwendung HINWEIS
A1,A2
Schlauchpaket und Ventillast
Max. 30 kg49Nm max. für die Drehmomenterhöhung des Oberarms
B Sonstige Max. 250 kg
40 255
3050
73117
120
855
75 137.5
91
40255
133
120
Gewindebohrung M8(4 Bohrungen) (Tiefe: 15mm)
A1
25540
120
Gewindebohrung M8(4 Bohrungen) (Tiefe: 15mm)
A2
855
75 137.5
B
5030
73117
Gewindebohrung M12(4 Bohrungen) (Tiefe: 24mm)
B
410
73
255 40
120
133
Gewindebohrung M12(4 Bohrungen) (Tiefe: 24mm)
Alle Maße in mm!
7-1

7.2 Innenliegende Kabel und DruckluftführungHW0482027-MG_D
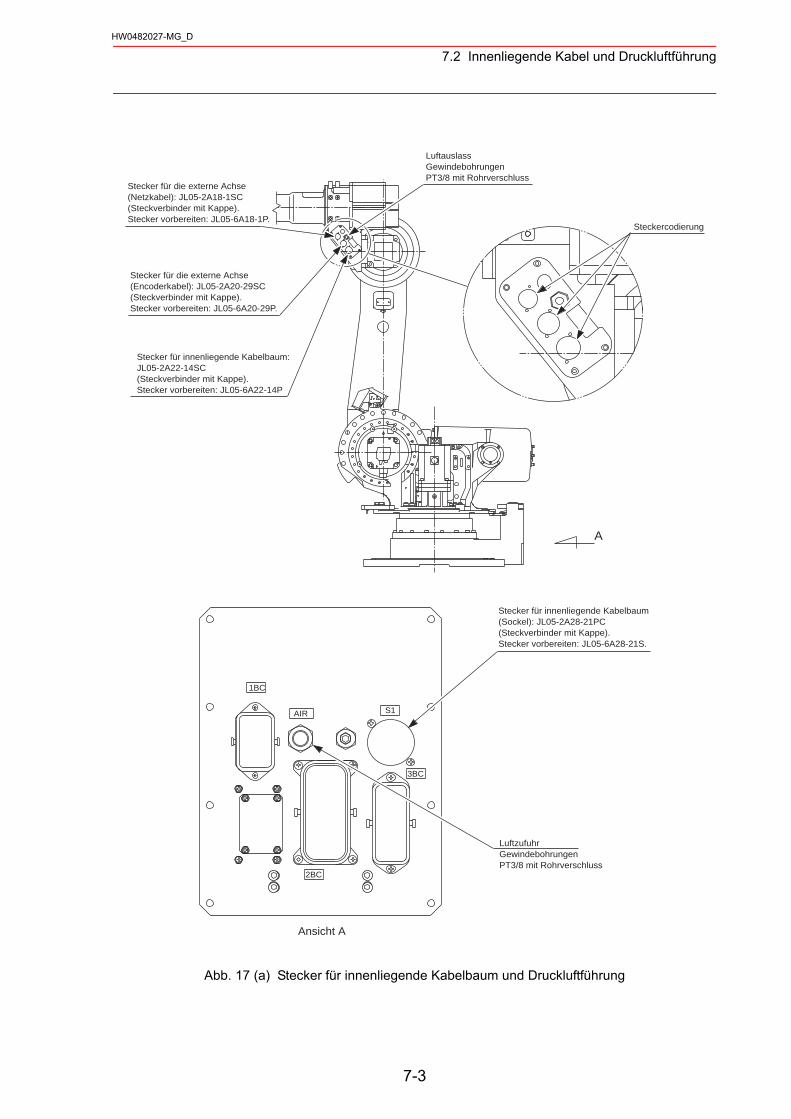
7.2 Innenliegende Kabel und Druckluftführung
Im Roboter befindet sich ein innenliegender Kabelbaum, 3 Drähten für Ventile (0,75 mm2), 18 Drähten( 6 x 0,5 mm2 , 12 x 0,75 mm2 ), die Kabel für die externen Achsen (4 x 1,0 mm2, 2 x 0,5 mm2 , 4 x 0,2 mm2 ), und zwei Luftleitungen werden für den Roboter benutzt "Abb. 17 (a) Stecker für innenliegende Kabelbaum und Druckluftführung" dargestellt.Die Pins und die Klemmen werden wie in "Abb. 17 (b) Stecker für innenliegende Kabel (Details Pins)" dargestellt zugeordnet. Die Verdrahtung muss vom Anwender durchgeführt werden.
• Zulässiger Strom für Drähte : 8,0 A oder weniger / Draht. (1,25mm2)
: 7,0 A oder weniger / Draht. (1,0mm2)
: 5,0 A oder weniger / Draht. (0,75mm2)
: 3,5 A oder weniger / Draht. (0,5mm2)
: 2,3 A oder weniger / Draht. (0,2mm2)
• Der maximale Druck für die Druckluftführung ist 490 kPa oder weniger. (Der innere Durchmesser der Druckluftführung: Ø 8 mm )
7-2
7.2 Innenliegende Kabel und DruckluftführungHW0482027-MG_D
Abb. 17 (a) Stecker für innenliegende Kabelbaum und Druckluftführung
A
Stecker für die externe Achse(Netzkabel): JL05-2A18-1SC(Steckverbinder mit Kappe).Stecker vorbereiten: JL05-6A18-1P.
Stecker für die externe Achse(Encoderkabel): JL05-2A20-29SC(Steckverbinder mit Kappe).Stecker vorbereiten: JL05-6A20-29P.
Stecker für innenliegende Kabelbaum:JL05-2A22-14SC(Steckverbinder mit Kappe).Stecker vorbereiten: JL05-6A22-14P
LuftauslassGewindebohrungen PT3/8 mit Rohrverschluss
Steckercodierung
3BC
S1
1BC
AIR
2BC
Stecker für innenliegende Kabelbaum(Sockel): JL05-2A28-21PC(Steckverbinder mit Kappe).Stecker vorbereiten: JL05-6A28-21S.
LuftzufuhrGewindebohrungen PT3/8 mit Rohrverschluss
Ansicht A
7-3

7.2 Innenliegende Kabel und DruckluftführungHW0482027-MG_D
Abb. 17 (b) Stecker für innenliegende Kabel (Details Pins)
43
14
20
13
21
15
8 9
22
1 2
11
17
10
18
12
5 6
16 19
7
32
2726
33
2824
29
23
30
25
34 35 36
31
7
12
3
16
10
2
4 5
9
1
6
8
1817
13 14 15
11
Pinbelegung für innenliegenden E/A Kabelbaum(Sockelseite)
2
P
P 0,5mm (6 Pins)
P
2
20,75mm (3 Pins)
21
43
76
1098
5
131211
1514
1718
212019
16
0,75mm (12 Pins)
Pins belegt
1 2
7 8
4 5
6
3
9
Pins für das Netzkabel der externen Achsen
2
245
23
1
60,5mm (2 Pins)
1,0mm (4 Pins)Pins belegt
20,5mm (6 Pins)
P
P
P
20,75mm (12 Pins)
1
432
67
1098
5
1211
1415
13
181716
Pinbelegung für innenliegenden E/A Kabelbaum(Gehäuseseite)
Pins belegt
21
3
10
6
7
5
8
4
9
1615
1213 11 14
Pins für Encoderkabel der externen Achsen
20,2mm (4 Pins)P
P
21
15109Pins belegt
abgeschirmter Draht
7-4
8.1 Lage des S-Achsen-Endschalters
HW0482027-MG_D
8 Roboteraufbau
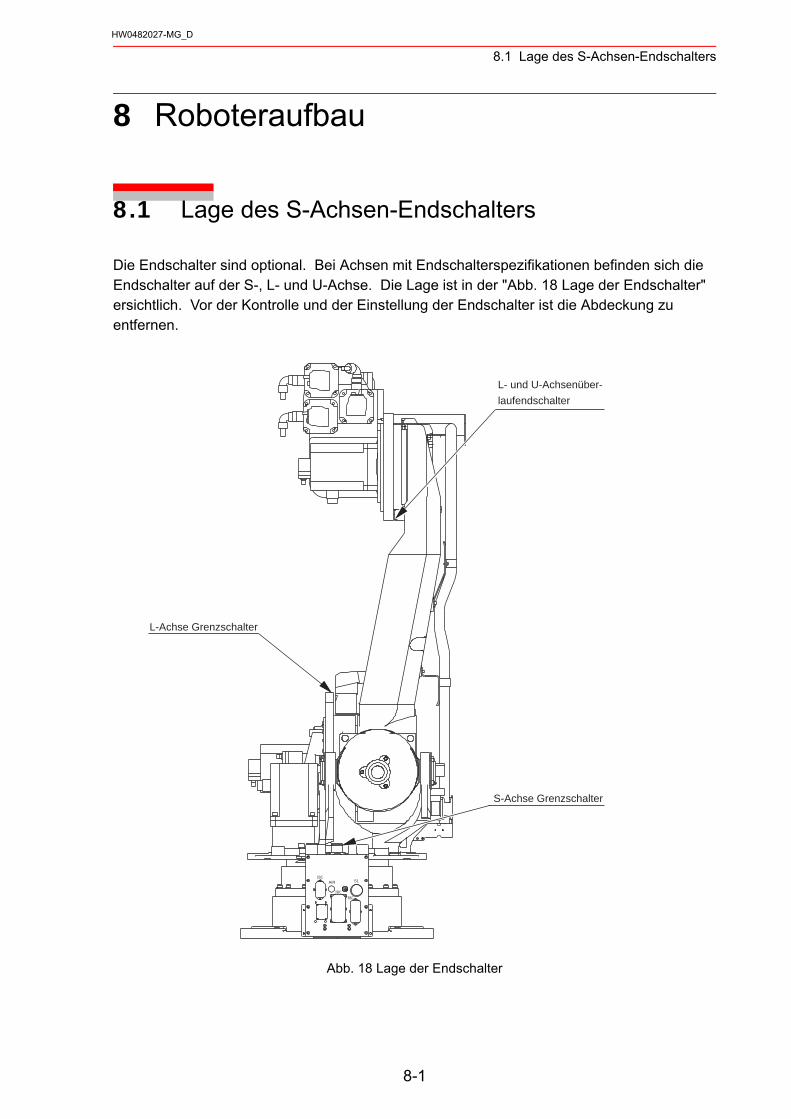
8.1 Lage des S-Achsen-Endschalters
Die Endschalter sind optional. Bei Achsen mit Endschalterspezifikationen befinden sich die Endschalter auf der S-, L- und U-Achse. Die Lage ist in der "Abb. 18 Lage der Endschalter" ersichtlich. Vor der Kontrolle und der Einstellung der Endschalter ist die Abdeckung zu entfernen.
Abb. 18 Lage der Endschalter
S1
3BC
AIR
2BC
1BC
L- und U-Achsenüber-laufendschalter
L-Achse Grenzschalter
S-Achse Grenzschalter
8-1
8.2 Innenliegende VerbindungenHW0482027-MG_D
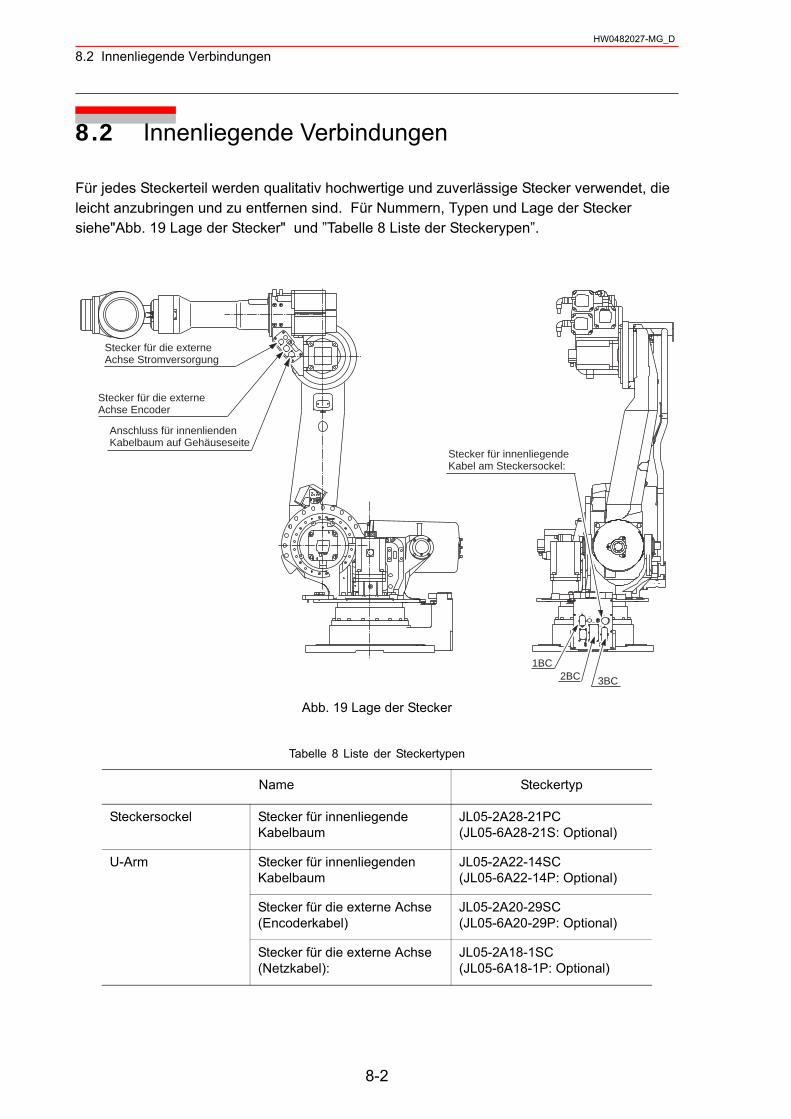
8.2 Innenliegende Verbindungen
Für jedes Steckerteil werden qualitativ hochwertige und zuverlässige Stecker verwendet, die leicht anzubringen und zu entfernen sind. Für Nummern, Typen und Lage der Stecker siehe"Abb. 19 Lage der Stecker" und ”Tabelle 8 Liste der Steckerypen”.
Abb. 19 Lage der Stecker
Tabelle 8 Liste der Steckertypen
Name Steckertyp
Steckersockel Stecker für innenliegende Kabelbaum
JL05-2A28-21PC(JL05-6A28-21S: Optional)
U-Arm Stecker für innenliegenden Kabelbaum
JL05-2A22-14SC(JL05-6A22-14P: Optional)
Stecker für die externe Achse(Encoderkabel)
JL05-2A20-29SC(JL05-6A20-29P: Optional)
Stecker für die externe Achse(Netzkabel):
JL05-2A18-1SC(JL05-6A18-1P: Optional)
Stecker für die externeAchse Stromversorgung
Stecker für die externeAchse Encoder
Anschluss für innenlienden Kabelbaum auf Gehäuseseite
S1
3BC
AIRA
molexmolexmolex
2BC
1BC
3BC
1BC2BC
Stecker für innenliegendeKabel am Steckersockel:
8-2

9.1 Inspektionszeiträume
HW0482027-MG_D
9 Wartung und Inspektion
9.1 Inspektionszeiträume
Nur sorgfältig und rechtzeitig durchgeführte Inspektionen gewährleisten den sicheren Betrieb des Roboters. Außerdem sorgen Sie für einen dauerhaften, präzisen Einsatz über einen langen Zeitraum, optimale Lebensdauer und beugen übermäßigem Verschleiß und Fehlfunktionen vor. Die Inspektionen sind in 6 Zeiträume unterteilt. Führen Sie die Inspektionen in den periodischen Zeiträumen wie in der "Tabelle. 9 Inspektionspositionen " angeben durch.In der "Tabelle. 9 Inspektionspositionen " sind die Inspektionen in 3 Anforderungsebenen unterteilt. Wartungs-, Inspektionsarbeiten, die von eingewiesenen Personal des Betreibers durchgeführt werden können, Wartungs-, Inspektionsarbeiten, die von geschulten Personal durchgeführt werden müssen, sowie Wartungs-, Inspektionsarbeiten, die vom Service Personal der Fa. MOTOMAN robotec GmbH durchgeführt werden müssen. Inspektionen sind ausschließlich vom Fachpersonal durchzuführen.
• Bevor Sie die Wartungs- oder Inspektionsmaßnahme durchführen, vergewissern Sie sich, dass die Hauptspannungsversorgung ausgeschaltet ist, und bringen Sie ein Warnschild an. (z. B. KEINE SPANNUNG EINSCHALTEN.)
Missachtung dieser Warnung kann zu Verletzungen oder Stromschlägen führen.
• Sämtliche Wartungs- und Inspektionsarbeiten sind vom Fachpersonal durchzuführen.
Missachtung dieses Hinweises kann zu Verletzungen oder Stromschlägen führen.
• Zu Fragen hinsichtlich einer Demontage, Zerlegung oder Instandsetzung kontaktieren Sie bitte Ihre MOTOMAN robotec GmbH.
• Bevor der Stecker der Signalleitung für Wartungs- oder Inspektionsarbeiten entfernt wird, muss die Batterieeinheit angeschlossen werden.
Bei Missachtung gehen die Home-Position-Daten verloren.
WARNUNG
ACHTUNG
9-1

9.1 InspektionszeiträumeHW0482027-MG_D
• Die Servospannungszeit ist entscheidend für die Inspektionsintervalle.• Falls der Roboter für andere Applikationen eingesetzt wird, müssen die Inspektionen auf
einer von Fall zu Fall neu zu definierenden Grundlage angepasst werden.• Wenn bestimmte Achsen hauptsächlich belastet werden (z.B. beim Handling) dann
müssen die Intervalle für diese Achsen verkürzt werden. Bei Fragen wenden Sie sich bitte an Ihre MOTOMAN robotec GmbH.
Tabelle. 9 Inspektionspositionen
Positions-nummer*4
PrüfzeiträumePrüf-
methode Arbeitsvorgang
Durchzuführen von
Täg-lich
Nach1000Std
Nach6000Std
Nach12000
Std
24000Std
36000Std
Personal Lizenz-nehmer
MOTOMAN Wartungs-personal
Ausrichtungs-markierung
Sicht-kontrolle
Prüfen aller Markierungen auf Überschneidung und Beschädigungen in der Home Position.
Äußere Kabel Sicht-kontrolle
Überprüfen der Kabel auf Beschädigung.
Arbeitsbereich undRoboter
Sicht-kontrolle
Arbeitsbereich säubern, wenn Staub oder Spritzer vorhanden. Überprüfen auf Beschädigung und Risse.
L-, U-Achsenmotor
Sicht-kontrolle
Auf Fettaustritt achten.*5
Sockel-schrauben
Dreh-moment-schlüssel
Lose Schrauben nachziehen. Austauschen, falls nötig.
Roboter-abdeckungen
Schraubendreher,
Schraubenschlüssel
Lose Schrauben nachziehen. Austauschen, falls nötig.
S-, L-, U-AchsenmotorSteckver-bindung
manuell
Auf lose Verbindungen prüfen und anziehen, falls erforderlich.
Steckersockel manuell Auf lose Verbindungen prüfen.
Ausgleichs-zylinder Fettpresse
Fett einfüllen. Siehe Kap. 9.2.6
HINWEIS
9-2

9.1 Inspektionszeiträume
HW0482027-MG_D
Kabelbaum im RoboterLeitung für S-, L-, U-Achsen)Leitung für R-, B-, T-Achsen)
Multimeter
Den Durchgang von den Stecker am Sockel und den Zwischensteckern durch manuelles Bewegen der Drähte prüfen. Die Schutzspirale auf Verschleiß prüfen*1
Austauschen*2
Batterieeinheit im Roboter
Wechseln der Batterien, wenn der Batteriealarm erscheint oder nachdem der Roboter 36.000 Std. betrieben worden ist. Siehe Kap. 9.2.1
S-Achsen-Untersetzungs-getriebeGetriebe S-Achse
Fettpresse
Auf Fehlfunktionen prüfen. (Austauschen, falls nötig.) Fettfüllung nachfüllen*3 (alle 6000 Stunden). Siehe Kap. 9.2.1Fettfüllung austauschen*3
(alle 12000 Std.).Siehe Kap. 9.2.2
L-Achsen-Untersetzungs-getriebe
Fettpresse
Auf Fehlfunktionen prüfen. (Austauschen, falls nötig.) Fettfüllung nachfüllen*3 (alle 6000 Stunden). Siehe Kap. 9.2.3Fettfüllung austauschen*3 (alle 12000 Std.). Siehe Kap. 9.2.3
U-Achsen-Untersetzungs-getriebe
Fettpresse
Auf Fehlfunktionen prüfen. (Austauschen, falls nötig.) Fettfüllung nachfüllen*3 (alle 6000 Stunden). Siehe Kap. 9.2.4Fettfüllung austauschen*3 (alle 12000 Std.). Siehe Kap. 9.2.4
R-Achsen-Untersetzungs-getriebe
Fettpresse
Auf Fehlfunktionen prüfen. (Austauschen, falls nötig.) Fettfüllung nachfüllen*3 (alle 6000 Stunden). Siehe Kap. 9.2.5Fettfüllung austauschen*3 (alle 12000 Std.). Siehe Kap. 9.2.5
Tabelle. 9 Inspektionspositionen
Positions-nummer*4
PrüfzeiträumePrüf-
methode Arbeitsvorgang
Durchzuführen von
Täg-lich
Nach1000Std
Nach6000Std
Nach12000
Std
24000Std
36000Std
Personal Lizenz-nehmer
MOTOMAN Wartungs-personal
11
12
13
14
15
9-3
9.1 InspektionszeiträumeHW0482027-MG_D
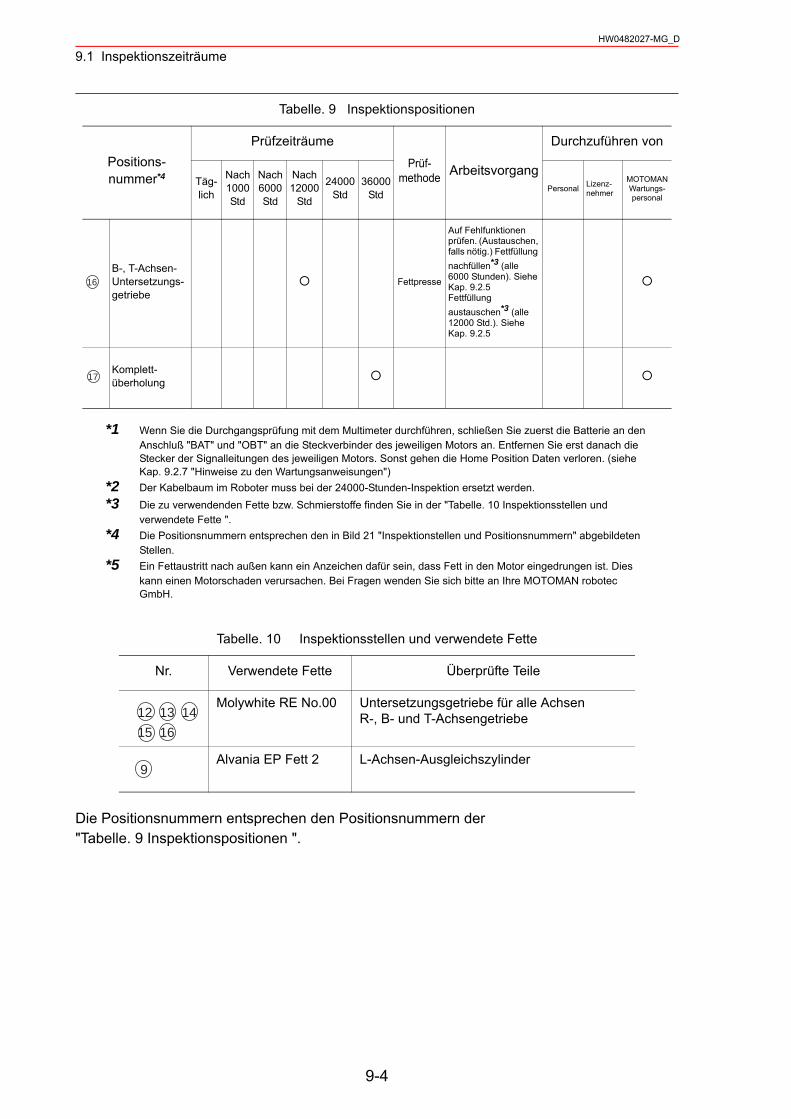
*1 Wenn Sie die Durchgangsprüfung mit dem Multimeter durchführen, schließen Sie zuerst die Batterie an den Anschluß "BAT" und "OBT" an die Steckverbinder des jeweiligen Motors an. Entfernen Sie erst danach die Stecker der Signalleitungen des jeweiligen Motors. Sonst gehen die Home Position Daten verloren. (siehe Kap. 9.2.7 "Hinweise zu den Wartungsanweisungen")
*2 Der Kabelbaum im Roboter muss bei der 24000-Stunden-Inspektion ersetzt werden.*3 Die zu verwendenden Fette bzw. Schmierstoffe finden Sie in der "Tabelle. 10 Inspektionsstellen und
verwendete Fette ".*4 Die Positionsnummern entsprechen den in Bild 21 "Inspektionstellen und Positionsnummern" abgebildeten
Stellen.*5 Ein Fettaustritt nach außen kann ein Anzeichen dafür sein, dass Fett in den Motor eingedrungen ist. Dies
kann einen Motorschaden verursachen. Bei Fragen wenden Sie sich bitte an Ihre MOTOMAN robotec GmbH.
Die Positionsnummern entsprechen den Positionsnummern der "Tabelle. 9 Inspektionspositionen ".
B-, T-Achsen-Untersetzungs-getriebe
Fettpresse
Auf Fehlfunktionen prüfen. (Austauschen, falls nötig.) Fettfüllung nachfüllen*3 (alle 6000 Stunden). Siehe Kap. 9.2.5Fettfüllung austauschen*3 (alle 12000 Std.). Siehe Kap. 9.2.5
Komplett-überholung
Tabelle. 10 Inspektionsstellen und verwendete Fette
Nr. Verwendete Fette Überprüfte Teile
Molywhite RE No.00 Untersetzungsgetriebe für alle AchsenR-, B- und T-Achsengetriebe
Alvania EP Fett 2 L-Achsen-Ausgleichszylinder
Tabelle. 9 Inspektionspositionen
Positions-nummer*4
PrüfzeiträumePrüf-
methode Arbeitsvorgang
Durchzuführen von
Täg-lich
Nach1000Std
Nach6000Std
Nach12000
Std
24000Std
36000Std
Personal Lizenz-nehmer
MOTOMAN Wartungs-personal
16
17
12 13 1415 16
9
9-4

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
9.2 Hinweise zu den Wartungsanweisungen
9.2.1 Wechsel der Batterieeinheit
Die Batterieeinheiten sind an zwei Stellen befestigt, die in "Abb. 22 (a) Batterielage (Rückseite)" und "Abb.22 (b) Batterielage (Draufsicht)" dargestellt sind.
Falls in der NX100 ein Batteriealarm auftritt, wechseln Sie die Batterie wie im Folgenden beschrieben:
Abb. 22 (a) Batterielage (Rückseite)
Abb. 22 (b) Batterielage (Draufsicht)
Platte Befestigungsschrauben M4
Steckersockel
Sockel
S1
3BC
AIR
2BC
1BC
Platine
Batterieeinheit
9-6
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
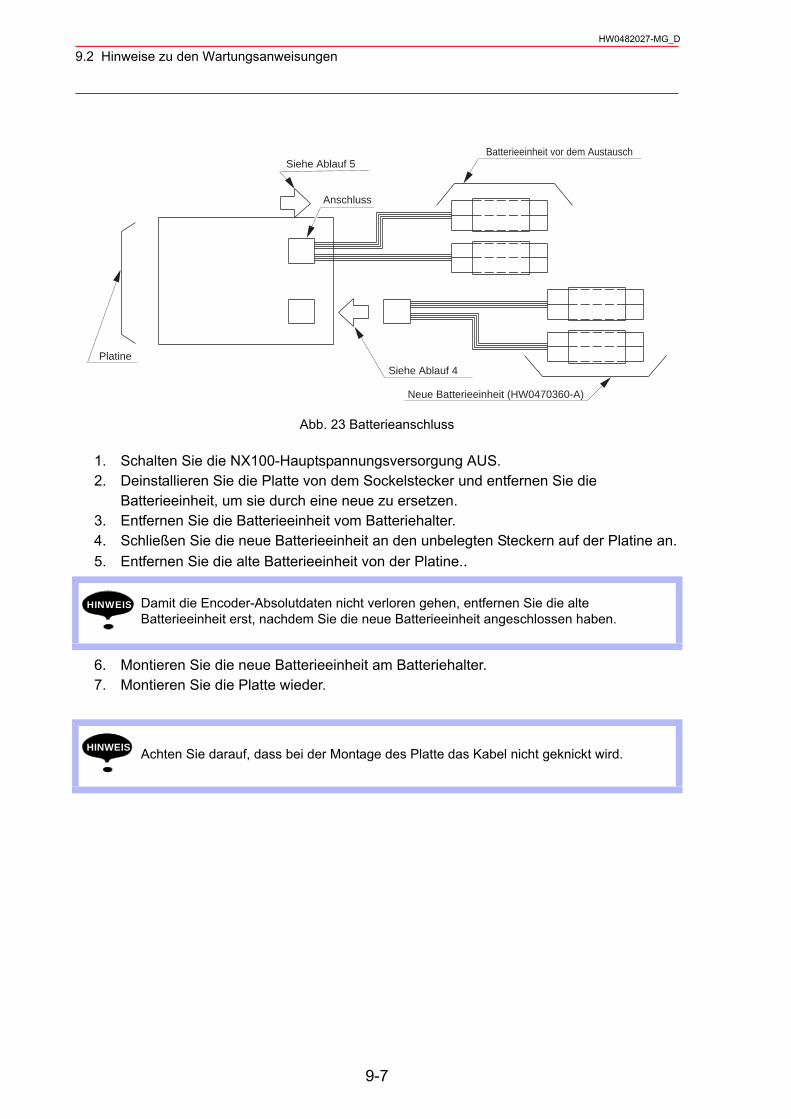
Abb. 23 Batterieanschluss
1. Schalten Sie die NX100-Hauptspannungsversorgung AUS.2. Deinstallieren Sie die Platte von dem Sockelstecker und entfernen Sie die
Batterieeinheit, um sie durch eine neue zu ersetzen.3. Entfernen Sie die Batterieeinheit vom Batteriehalter.4. Schließen Sie die neue Batterieeinheit an den unbelegten Steckern auf der Platine an.5. Entfernen Sie die alte Batterieeinheit von der Platine..
6. Montieren Sie die neue Batterieeinheit am Batteriehalter.7. Montieren Sie die Platte wieder.
Damit die Encoder-Absolutdaten nicht verloren gehen, entfernen Sie die alte Batterieeinheit erst, nachdem Sie die neue Batterieeinheit angeschlossen haben.
Achten Sie darauf, dass bei der Montage des Platte das Kabel nicht geknickt wird.
Anschluss
Batterieeinheit vor dem AustauschSiehe Ablauf 5
Siehe Ablauf 4
Neue Batterieeinheit (HW0470360-A)
Platine
HINWEIS
HINWEIS
9-7
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
9.2.2 Nachfüllen und Tausch der Fettfüllung des Untersetzungsgetriebes der S-Achse
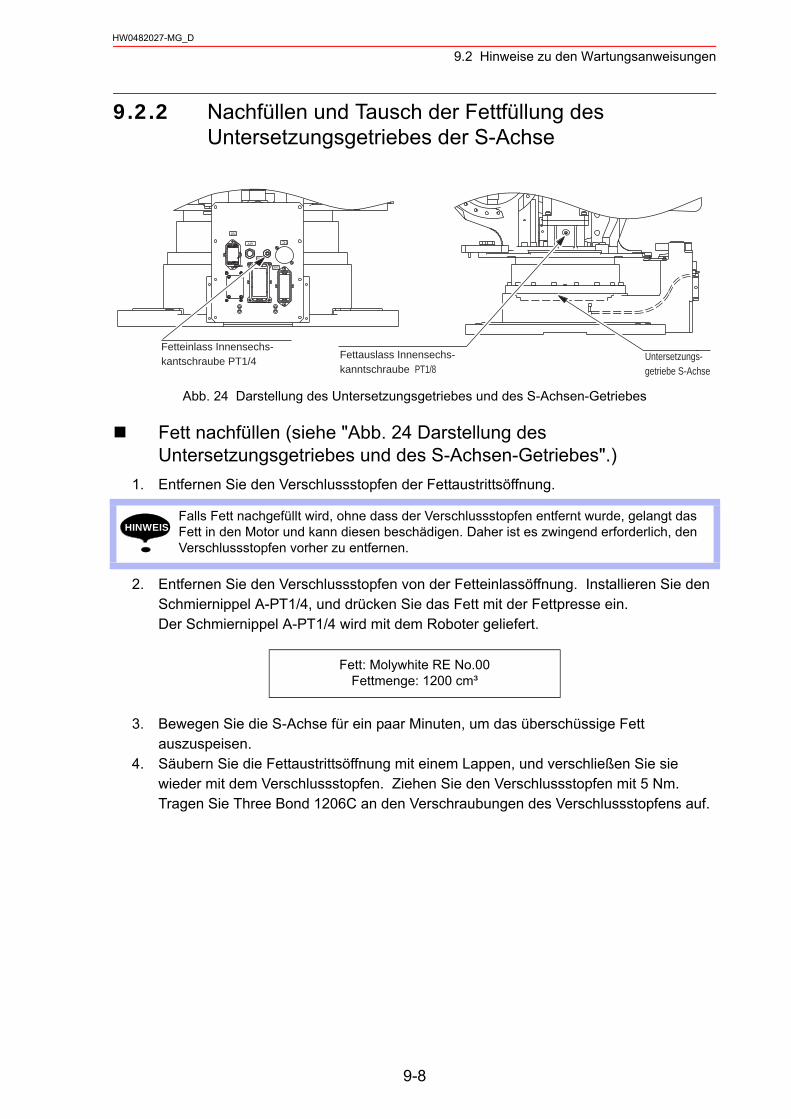
Abb. 24 Darstellung des Untersetzungsgetriebes und des S-Achsen-Getriebes
Fett nachfüllen (siehe "Abb. 24 Darstellung des Untersetzungsgetriebes und des S-Achsen-Getriebes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung.
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung. Installieren Sie den Schmiernippel A-PT1/4, und drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/4 wird mit dem Roboter geliefert.
3. Bewegen Sie die S-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
4. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 1200 cm³
S1
3BC
AIR
2BC
1BC
A
molexmolexmolex
Fettauslass Innensechs-kanntschraube PT1/8
Fetteinlass Innensechs-kantschraube PT1/4 Untersetzungs-
getriebe S-Achse
HINWEIS
9-8
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
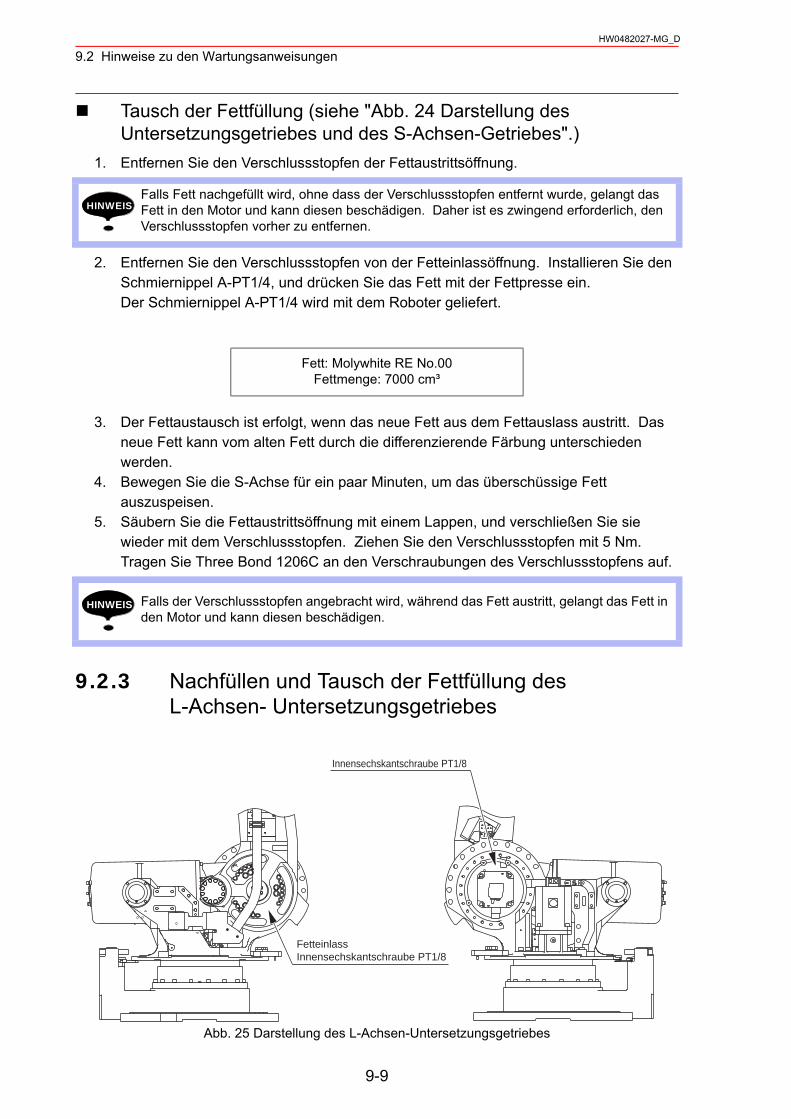
Tausch der Fettfüllung (siehe "Abb. 24 Darstellung des Untersetzungsgetriebes und des S-Achsen-Getriebes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung.
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung. Installieren Sie den Schmiernippel A-PT1/4, und drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/4 wird mit dem Roboter geliefert.
3. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
4. Bewegen Sie die S-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
9.2.3 Nachfüllen und Tausch der Fettfüllung des L-Achsen- Untersetzungsgetriebes
Abb. 25 Darstellung des L-Achsen-Untersetzungsgetriebes
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 7000 cm³
Falls der Verschlussstopfen angebracht wird, während das Fett austritt, gelangt das Fett in den Motor und kann diesen beschädigen.
HINWEIS
HINWEIS
Innensechskantschraube PT1/8
Fetteinlass Innensechskantschraube PT1/8
9-9
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Fett nachfüllen (siehe "Abb. 25 Darstellung des L-Achsen-Untersetzungsgetriebes".)
1. Stellen Sie den L-Arm vertikal zum Boden.2. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung.
3. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
4. Bewegen Sie die L-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Tausch der Fettfüllung (siehe "Abb. 25 Darstellung des L-Achsen-Untersetzungsgetriebes".)
1. Stellen Sie den L-Arm vertikal zum Boden.2. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
3. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
4. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
5. Bewegen Sie die L-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
6. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 280 cm³
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: Ca. 1400 cm³
HINWEIS
HINWEIS
9-10
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
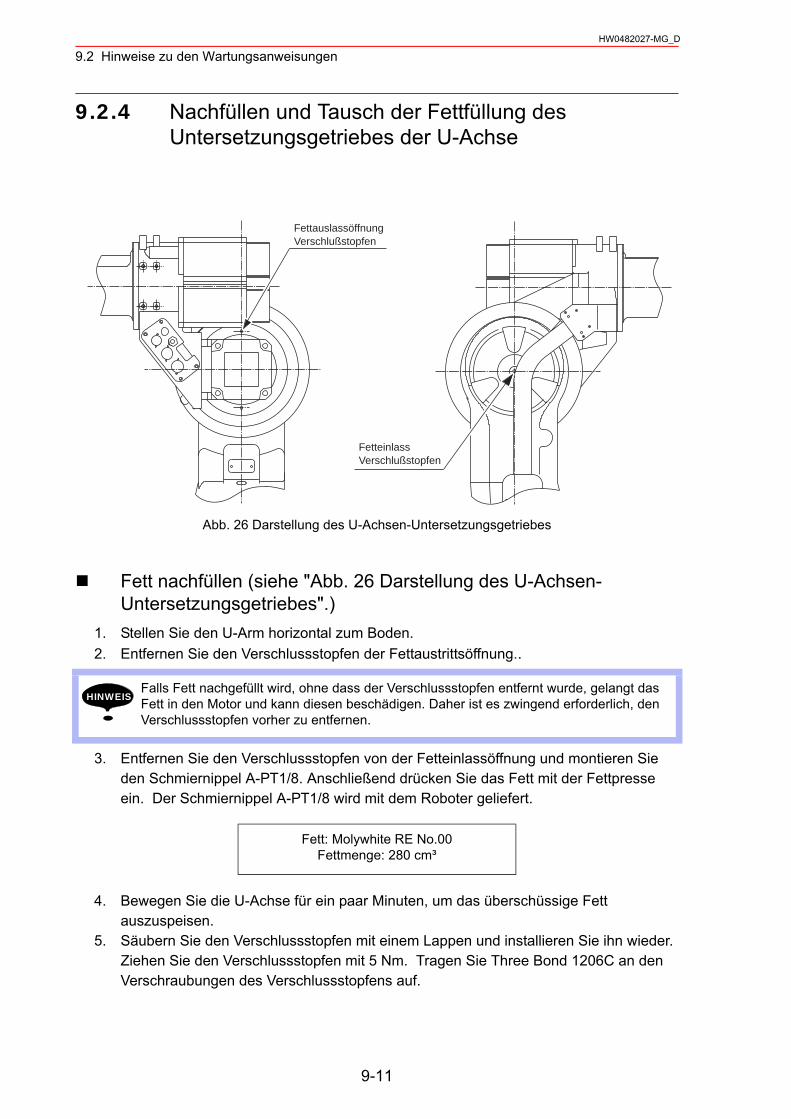
9.2.4 Nachfüllen und Tausch der Fettfüllung des Untersetzungsgetriebes der U-Achse
Abb. 26 Darstellung des U-Achsen-Untersetzungsgetriebes
Fett nachfüllen (siehe "Abb. 26 Darstellung des U-Achsen-Untersetzungsgetriebes".)
1. Stellen Sie den U-Arm horizontal zum Boden.2. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
3. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
4. Bewegen Sie die U-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie den Verschlussstopfen mit einem Lappen und installieren Sie ihn wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 280 cm³
FettauslassöffnungVerschlußstopfen
FetteinlassVerschlußstopfen
HINWEIS
9-11

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Tausch der Fettfüllung (siehe "Abb. 26 Darstellung des U-Achsen-Untersetzungsgetriebes".)
1. Stellen Sie den U-Arm horizontal zum Boden.2. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
3. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
4. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
5. Bewegen Sie die U-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
6. Säubern Sie den Verschlussstopfen mit einem Lappen und installieren Sie ihn wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett in den Motor und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: Ca. 1800 cm³
Falls der Verschlussstopfen angebracht wird, während das Fett austritt, gelangt das Fett in den Motor und kann diesen beschädigen.
HINWEIS
HINWEIS
9-12

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
9.2.5 Nachfüllen und Tausch der Fettfüllung des U-Arms
Abb. 27 Darstellung des U-Armes
( )Innensechskanntschraube
Untersetzungsgetriebe T-Achse
Untersetzungsgetriebe R-Achse
Fetteinlass (BT-Achse Untersetzungsgetriebe)Innensechskanntschraube
Untersetzungsgetriebe B-Achse
Fettauslass (R- und B-Achse Untersetzungsgetriebe)Innensechskanntschraube
Fetteinlass (UntersetzungsgetriebeR-Achse) Innensechskanntschraube
Fettauslass (RBT-Getriebe im Gehäuse)Innensechskanntschraube
Fettauslass (UntersetzungsgetriebeT-Achse) Innensechskanntschraube
9-13

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Nachfüllen der Fettfüllung für das Getriebe der R-, B- und T-Achse im Gehäuse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung.
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert..
3. Bewegen Sie die R-, B- und T-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
4. Säubern Sie die Fettaustrittsöffnung mit einem Lappen und verschließen Sie sie wieder mit dem Verschlussstopfen. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der R-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
3. Bewegen Sie die R-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
4. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
5. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 300 cm³
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 380cm³
HINWEIS
HINWEIS
9-14
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der B-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung.
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert..
3. Bewegen Sie die B-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
4. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
5. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Nachfüllen der Fettfüllung des Untersetzungsgetriebes der T-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel PT1/8 wird mit dem Roboter geliefert.
3. Bewegen Sie die T-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
4. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
5. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 260 cm³
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: 260 cm³
HINWEIS
HINWEIS
9-15
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Tausch der Fettfüllung der R-, B- und T-Achse im Gehäuse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
3. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
4. Bewegen Sie die R-, B- und T-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
6. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Tausch der Fettfüllung des Untersetzungsgetriebes der R-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
3. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: ca. 2000 cm³
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: ca. 2050 cm³
HINWEIS
HINWEIS
9-16

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
4. Bewegen Sie die R-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
6. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Tausch der Fettfüllung des Untersetzungsgetriebes der B-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
3. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
4. Bewegen Sie die B-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
6. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: ca. 1300 cm³
HINWEIS
9-17
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
Tausch der Fettfüllung des Untersetzungsgetriebes der T-Achse (siehe "Abb. 27 Darstellung des U-Armes".)
1. Entfernen Sie den Verschlussstopfen der Fettaustrittsöffnung..
2. Entfernen Sie den Verschlussstopfen von der Fetteinlassöffnung und montieren Sie den Schmiernippel A-PT1/8. Anschließend drücken Sie das Fett mit der Fettpresse ein. Der Schmiernippel A-PT1/8 wird mit dem Roboter geliefert.
3. Der Fettaustausch ist erfolgt, wenn das neue Fett aus dem Fettauslass austritt. Das neue Fett kann vom alten Fett durch die differenzierende Färbung unterschieden werden.
4. Bewegen Sie die T-Achse für ein paar Minuten, um das überschüssige Fett auszuspeisen.
5. Säubern Sie die Fettaustrittsöffnung mit einem Lappen, und verschließen Sie sie wieder mit dem Verschlussstopfen. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
6. Entfernen Sie den Schmiernippel von der Fetteinlassöffnung und installieren Sie den Verschlussstopfen wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Falls Fett nachgefüllt wird, ohne dass der Verschlussstopfen entfernt wurde, gelangt das Fett außerhalb des Schmierkastens und kann diesen beschädigen. Daher ist es zwingend erforderlich, den Verschlussstopfen vorher zu entfernen.
Fett: Molywhite RE No.00Fettmenge: ca. 1300 cm³
HINWEIS
9-18
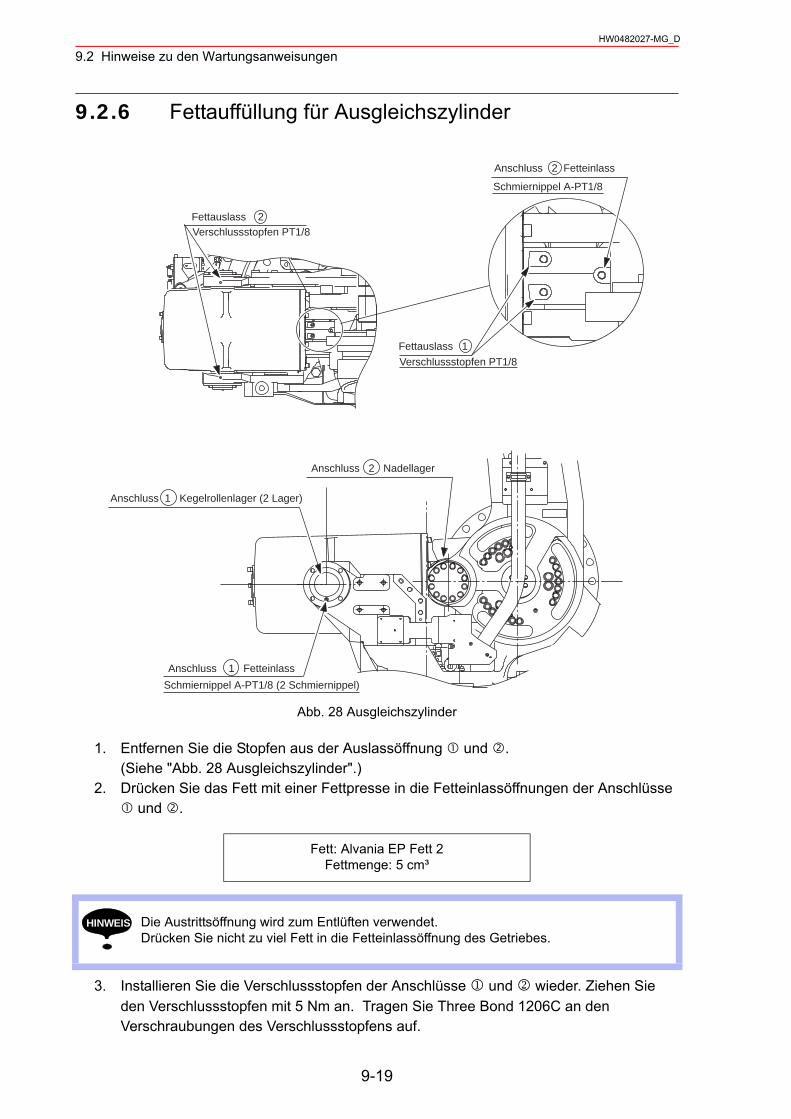
9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
9.2.6 Fettauffüllung für Ausgleichszylinder
Abb. 28 Ausgleichszylinder
1. Entfernen Sie die Stopfen aus der Auslassöffnung und . (Siehe "Abb. 28 Ausgleichszylinder".)
2. Drücken Sie das Fett mit einer Fettpresse in die Fetteinlassöffnungen der Anschlüsse und .
3. Installieren Sie die Verschlussstopfen der Anschlüsse 1 und 2 wieder. Ziehen Sie den Verschlussstopfen mit 5 Nm an. Tragen Sie Three Bond 1206C an den Verschraubungen des Verschlussstopfens auf.
Fett: Alvania EP Fett 2Fettmenge: 5 cm³
Die Austrittsöffnung wird zum Entlüften verwendet. Drücken Sie nicht zu viel Fett in die Fetteinlassöffnung des Getriebes.
Verschlussstopfen PT1/8
Verschlussstopfen PT1/8 Fettauslass 1
Anschluss 2 Fetteinlass
Fettauslass 2
Schmiernippel A-PT1/8
Anschluss 1 Kegelrollenlager (2 Lager)
Schmiernippel A-PT1/8 (2 Schmiernippel)Anschluss 1 Fetteinlass
Anschluss 2 Nadellager
HINWEIS
9-19

9.2 Hinweise zu den WartungsanweisungenHW0482027-MG_D
9.2.7 Hinweise zu den Wartungsanweisungen
Anschluss der BatterieeinheitDie Steckverbindungen (Einraststecker) für den Batterie-Backup sind am freien Ende der Motoren installiert (BAT und OBT sind markiert). Schließen Sie die Batterieeinheiten wie folgt an.
1. Entfernen Sie den Deckel der Batterie-Backup-Steckverbindung der Motoren.2. Schließen Sie die Batterieeinheiten (HW9470932-A) an die Steckverbindungen für den
Batterie-Backup (BAT und OBT sind markiert), die sich am Ende der Kabel für den Encoder befinden. (Entfernen Sie in diesem Fall den Encoderstecker und führen Sie die Wartungsmaßnahme durch.)
3. Prüfen Sie alle Steckverbindungen nach der Wartungsmaßnahme, und entfernen Sie die Batterieeinheiten. Montieren Sie die Deckel der Batterie-Backup-Steckverbindung der Motoren.
Abb. 29 Anschluss der Batterieeinheit
Bei Wartungsarbeiten wie z.B. Wechsel eines Kabelbaums im Roboter kann es notwendig sein, den Encoderstecker zu entfernen. In diesem Fall schließen Sie die Batterieeinheit an den Batterie-Backup-Stecker, bevor Sie den Encoderstecker entfernen.Falls der Encoderstecker entfernt wird, ohne dass die Batterieeinheit angeschlossen wurde, können die Encoder-Absolutdaten verloren gehen.Der Batterieeinheitanschluss ist in der "Abb. 29 Anschluss der Batterieeinheit" ersichtlich.
Entfernen Sie die Batterieeinheit nicht aus dem Batteriehalter.
HINWEIS
HINWEIS
b
a
a
b0BT
BAT BAT*
0BT*
Motor
Stecker für Back-Up-Batterieeinheit
HW9470932-A (Batterieeinheit)
a: Krimpverbindung (Pin)b: Krimpverbindung (Sockel)
Stromanschluss
Encoderanschluss
9-20
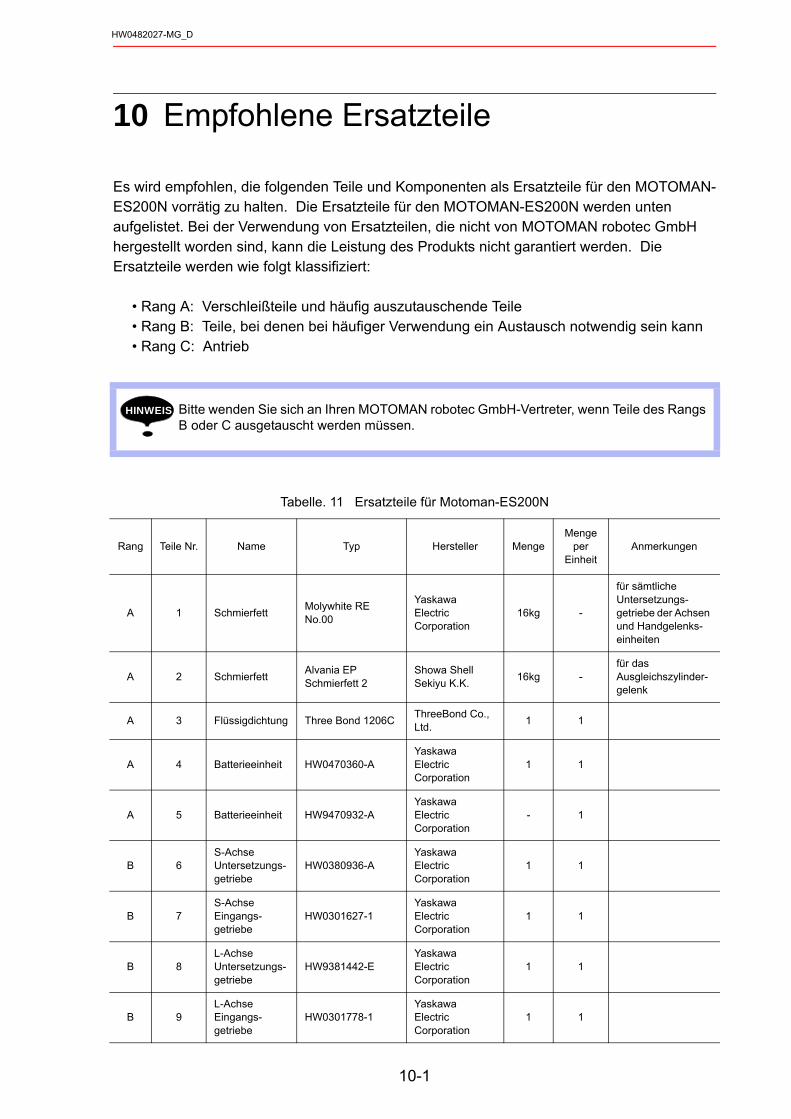
HW0482027-MG_D
10 Empfohlene Ersatzteile
Es wird empfohlen, die folgenden Teile und Komponenten als Ersatzteile für den MOTOMAN-ES200N vorrätig zu halten. Die Ersatzteile für den MOTOMAN-ES200N werden unten aufgelistet. Bei der Verwendung von Ersatzteilen, die nicht von MOTOMAN robotec GmbH hergestellt worden sind, kann die Leistung des Produkts nicht garantiert werden. Die Ersatzteile werden wie folgt klassifiziert:
• Rang A: Verschleißteile und häufig auszutauschende Teile• Rang B: Teile, bei denen bei häufiger Verwendung ein Austausch notwendig sein kann• Rang C: Antrieb
Bitte wenden Sie sich an Ihren MOTOMAN robotec GmbH-Vertreter, wenn Teile des Rangs B oder C ausgetauscht werden müssen.
Tabelle. 11 Ersatzteile für Motoman-ES200N
Rang Teile Nr. Name Typ Hersteller MengeMenge
perEinheit
Anmerkungen
A 1 Schmierfett Molywhite RE No.00
YaskawaElectricCorporation
16kg -
für sämtliche Untersetzungs-getriebe der Achsen und Handgelenks-einheiten
A 2 Schmierfett Alvania EPSchmierfett 2
Showa Shell Sekiyu K.K. 16kg -
für das Ausgleichszylinder-gelenk
A 3 Flüssigdichtung Three Bond 1206C ThreeBond Co., Ltd. 1 1
A 4 Batterieeinheit HW0470360-AYaskawaElectricCorporation
1 1
A 5 Batterieeinheit HW9470932-AYaskawaElectricCorporation
- 1
B 6S-AchseUntersetzungs-getriebe
HW0380936-AYaskawaElectricCorporation
1 1
B 7S-Achse Eingangs-getriebe
HW0301627-1YaskawaElectricCorporation
1 1
B 8L-AchseUntersetzungs-getriebe
HW9381442-EYaskawaElectricCorporation
1 1
B 9L-Achse Eingangs-getriebe
HW0301778-1YaskawaElectricCorporation
1 1
HINWEIS
10-1

HW0482027-MG_D
B 10U-AchseUntersetzungs-getriebe
HW0380793-AYaskawaElectricCorporation
1 1
B 11U-Achse Eingangs-getriebe
HW0301780-AYaskawaElectricCorporation
1 1
B 12R-AchseUntersetzungs-getriebe
HW0380780-AYaskawaElectricCorporation
1 1
B 13B-AchseUntersetzungs-getriebe
HW9381453-BYaskawaElectricCorporation
1 1
B 14T-AchseUntersetzungs-getriebe
HW0380794-AYaskawaElectricCorporation
1 1
B 15 Handgelenks-einheit HW0171254-A
YaskawaElectricCorporation
1 1
C 16Servomotor für S-, L- und U-Achsen
HW0382157-ASGMRS-37A2A-YR1*
YaskawaElectricCorporation
1 3
C 17Servomotor für R-, B- und T-Achsen
HW0382156-ASGMRS-13A2A-YR1*
YaskawaElectricCorporation
1 3
C 18 Kabelbaum im Roboter HW0171231-A
YaskawaElectricCorporation
1 1
C 19 Kabelbaum im Roboter HW0370954-A
YaskawaElectricCorporation
1 1
Tabelle. 11 Ersatzteile für Motoman-ES200N
Rang Teile Nr. Name Typ Hersteller MengeMenge
perEinheit
Anmerkungen
10-2
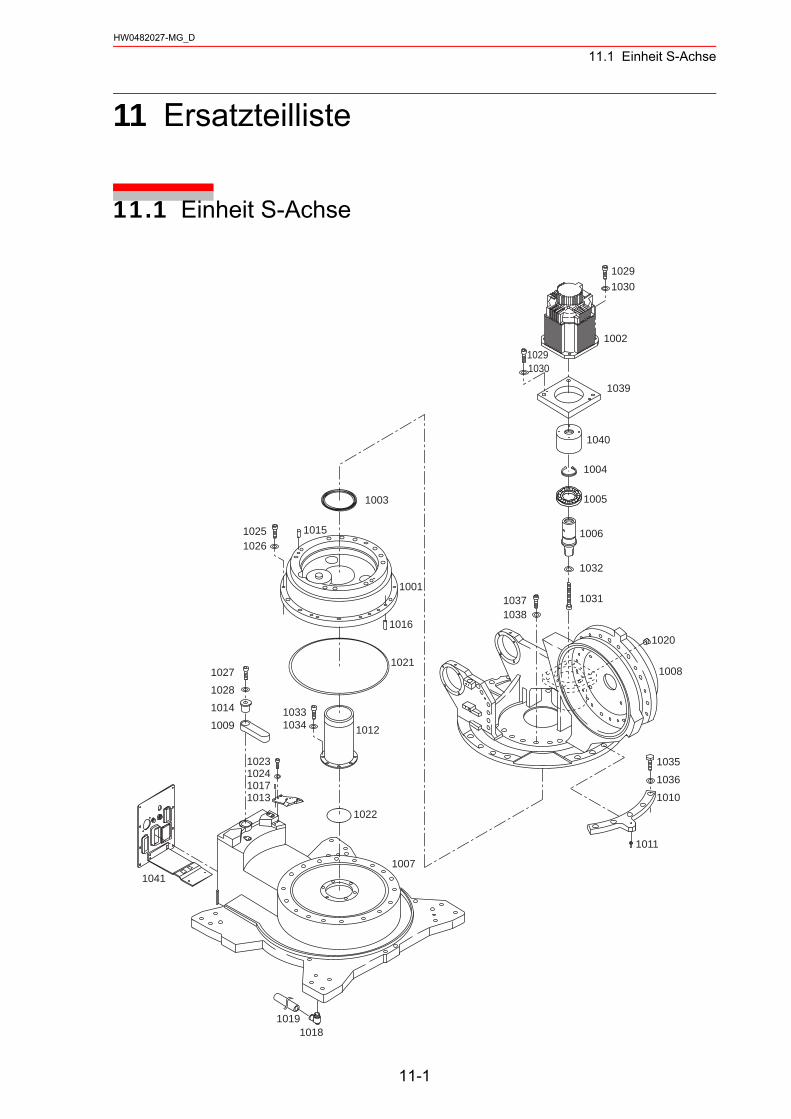
11.1 Einheit S-AchseHW0482027-MG_D
11 Ersatzteilliste
11.1 Einheit S-Achse
1001
1002
1039
1040
1003
1004
1005
1006
1007
1008
1009
1041
1010
1011
1012
1013
1014
1015
1016
1017
1020
1021
1022
10231024
10181019
10251026
10271028
10291030
10291030
1031
1032
10331034
1036
10371038
1035
11-1
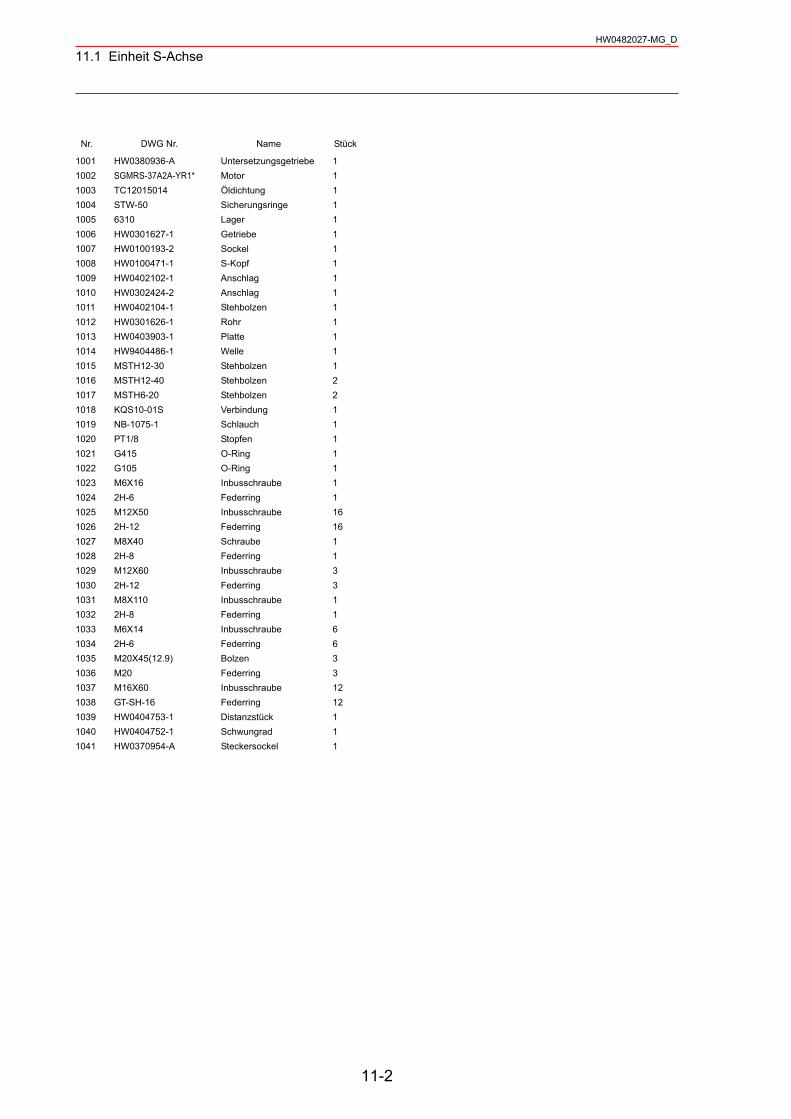
11.1 Einheit S-AchseHW0482027-MG_D
Nr. DWG Nr. Name Stück
1001 HW0380936-A Untersetzungsgetriebe 11002 SGMRS-37A2A-YR1* Motor 11003 TC12015014 Öldichtung 11004 STW-50 Sicherungsringe 11005 6310 Lager 11006 HW0301627-1 Getriebe 11007 HW0100193-2 Sockel 11008 HW0100471-1 S-Kopf 11009 HW0402102-1 Anschlag 11010 HW0302424-2 Anschlag 11011 HW0402104-1 Stehbolzen 11012 HW0301626-1 Rohr 11013 HW0403903-1 Platte 11014 HW9404486-1 Welle 11015 MSTH12-30 Stehbolzen 11016 MSTH12-40 Stehbolzen 21017 MSTH6-20 Stehbolzen 21018 KQS10-01S Verbindung 11019 NB-1075-1 Schlauch 11020 PT1/8 Stopfen 11021 G415 O-Ring 11022 G105 O-Ring 11023 M6X16 Inbusschraube 11024 2H-6 Federring 11025 M12X50 Inbusschraube 161026 2H-12 Federring 161027 M8X40 Schraube 11028 2H-8 Federring 11029 M12X60 Inbusschraube 31030 2H-12 Federring 31031 M8X110 Inbusschraube 11032 2H-8 Federring 11033 M6X14 Inbusschraube 61034 2H-6 Federring 61035 M20X45(12.9) Bolzen 31036 M20 Federring 31037 M16X60 Inbusschraube 121038 GT-SH-16 Federring 121039 HW0404753-1 Distanzstück 11040 HW0404752-1 Schwungrad 11041 HW0370954-A Steckersockel 1
11-2
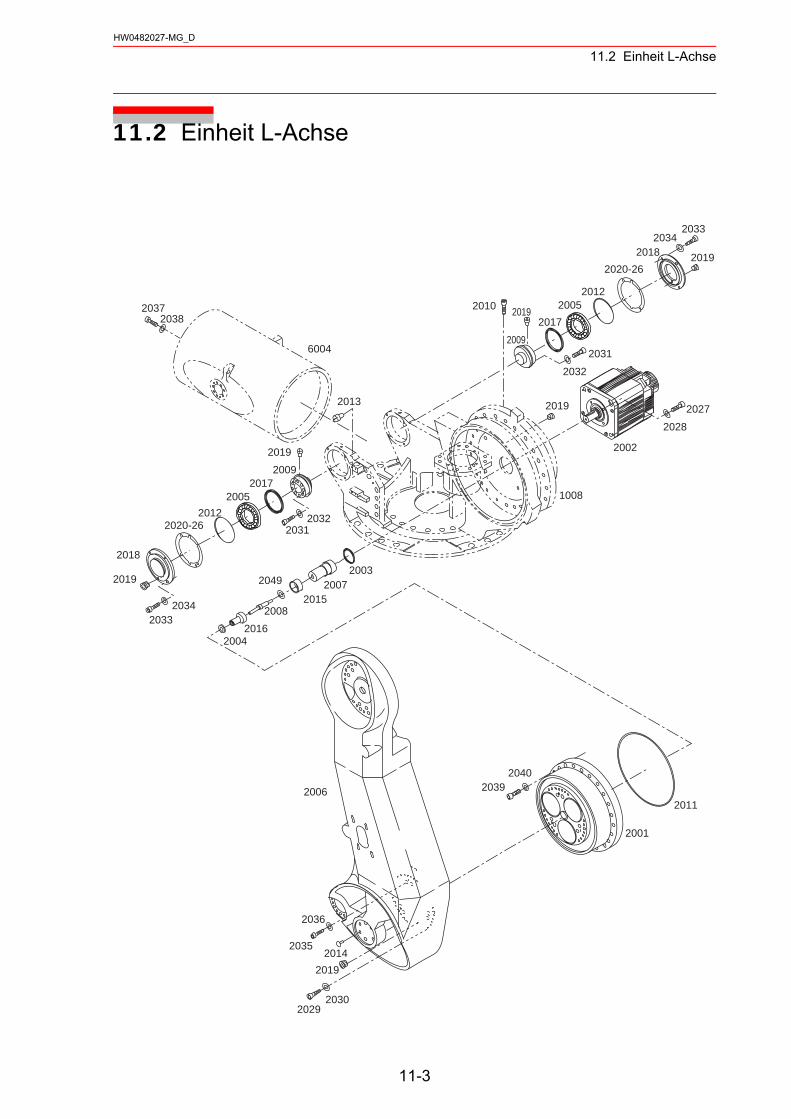
11.2 Einheit L-AchseHW0482027-MG_D
11.2 Einheit L-Achse
2001
2002
2003
2005
2006
20092019
2019
2009
2010
2011
2012
2012
2017
2017
2018
2018
2019
2019
2005
20072015
2016
2049
2004
2008
2020-26
2020-26
2031
2032
20372038
2013
6004
2014
1008
20312032
20342033
20332034
2028
20272019
2019
20392040
20292030
2035
2036
11-3
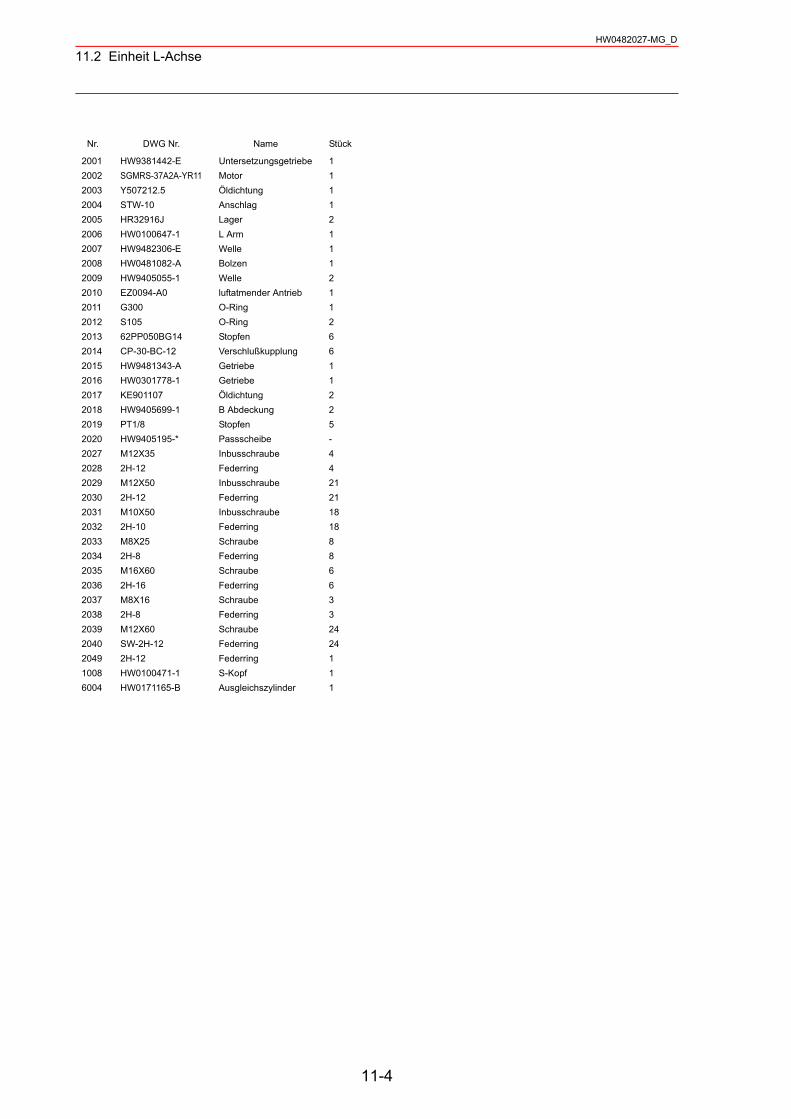
11.2 Einheit L-AchseHW0482027-MG_D
Nr. DWG Nr. Name Stück
2001 HW9381442-E Untersetzungsgetriebe 12002 SGMRS-37A2A-YR11 Motor 12003 Y507212.5 Öldichtung 12004 STW-10 Anschlag 12005 HR32916J Lager 22006 HW0100647-1 L Arm 12007 HW9482306-E Welle 12008 HW0481082-A Bolzen 12009 HW9405055-1 Welle 22010 EZ0094-A0 luftatmender Antrieb 12011 G300 O-Ring 12012 S105 O-Ring 22013 62PP050BG14 Stopfen 62014 CP-30-BC-12 Verschlußkupplung 62015 HW9481343-A Getriebe 12016 HW0301778-1 Getriebe 12017 KE901107 Öldichtung 22018 HW9405699-1 B Abdeckung 22019 PT1/8 Stopfen 52020 HW9405195-* Passscheibe -2027 M12X35 Inbusschraube 42028 2H-12 Federring 42029 M12X50 Inbusschraube 212030 2H-12 Federring 212031 M10X50 Inbusschraube 182032 2H-10 Federring 182033 M8X25 Schraube 82034 2H-8 Federring 82035 M16X60 Schraube 62036 2H-16 Federring 62037 M8X16 Schraube 32038 2H-8 Federring 32039 M12X60 Schraube 242040 SW-2H-12 Federring 242049 2H-12 Federring 11008 HW0100471-1 S-Kopf 16004 HW0171165-B Ausgleichszylinder 1
11-4
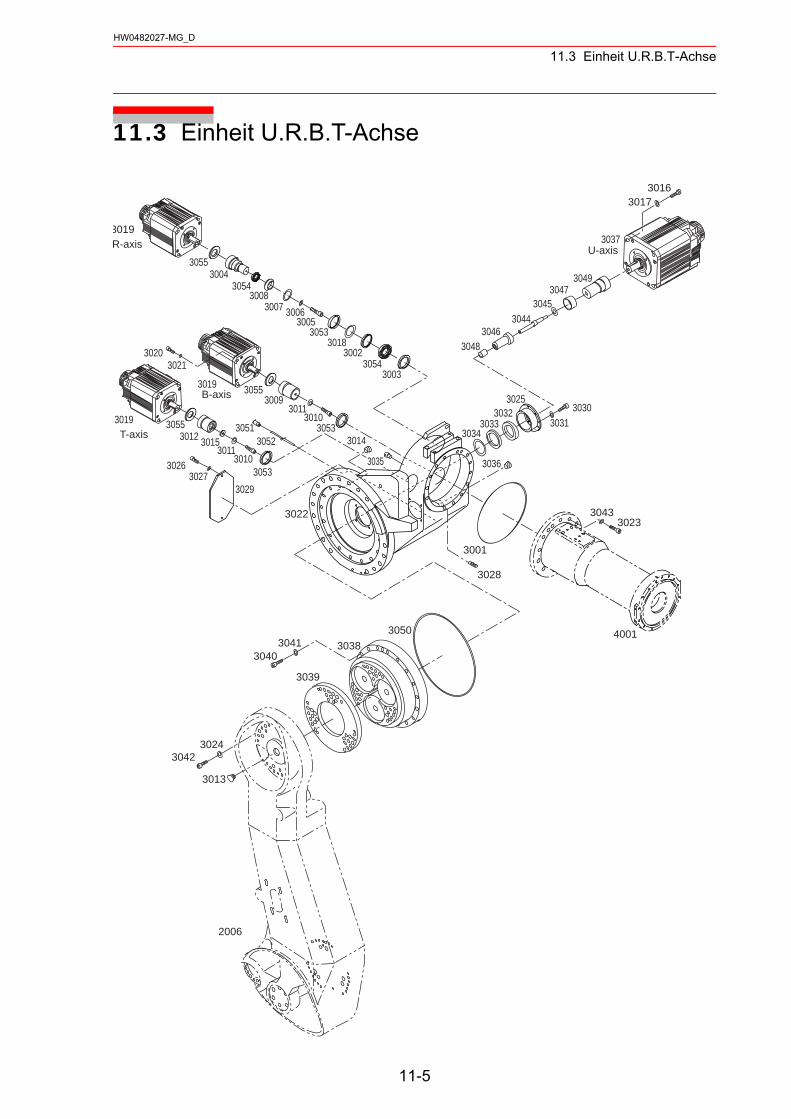
11.3 Einheit U.R.B.T-AchseHW0482027-MG_D
11.3 Einheit U.R.B.T-Achse
3001
3002
3003
3004
300530063007
3008
30093010
3011
3012 3015
30163017
3019R-axis
3019B-axis
3019T-axis
30203021
3022
3025
30263027
3028
4001
3029
30303031
30323033
3034
30353035 3036
3037U-axis
3038
3039
30403041
3042
3043
30443045
3046
3047
3048
3049
3050
30513052
3053
3053
30103011
3053
3054
3054
3055
3055
3055
3018
3023
3024
3013
2006
3014
11-5

11.3 Einheit U.R.B.T-AchseHW0482027-MG_D
Nr. DWG Nr. Name Stück
3001 GS210 O-Ring 13002 HW0402391-1 Coller 13003 HW0402406-1 Coller 13004 HW0302099-1 Getriebe 13005 M6X60 Schraube 13006 2H-6 Federring 13007 ISTW-30 Anschlag 13008 HW0402544-1 Coller 13009 HW0301970-1 Getriebe 13010 M6X25 Schraube 23011 2H-6 Federring 23012 HW0301968-1 Getriebe 13013 PT1/8 Stopfen 13014 PT1/8 Stopfen 13015 HW0401507-1 Platte 13016 M12X40 Schraube 43017 2H-12 Federring 43018 IRTW-55 Anschlag 13019 SGMRS-13A2A-YR1* Motor 33020 M8X25 Schraube 123021 2H-8 Federring 123022 HW0100239-1 Gehäuse 13023 M12X35 Schraube 183024 2H-12 Federring 183025 HW9405703-1 Flansch 13026 M6X16 Schraube 23027 2H-6 Federring 23028 MSTM8-20 Stehbolzen 13029 HW0402885-1 Abdeckung 13030 M6X16 Schraube 43031 2H-6 Federring 43032 HW9482447-A Öldichtung 13033 HW9405481-1 Coller 13034 IRTW-72 Anschlag 13035 PT1/8 Stopfen 13036 PT1/8 Stopfen 13037 SGMRS-37A2A-YR1* Motor 13038 HW0380793-A Untersetzungsgetriebe 13039 HW0301779-1 Distanzstück 13040 M12X60 Schraube 243041 2H-12 Federring 243042 M12X50 Schraube 333043 2H-12 Federring 333044 HW0481083-A Bolzen 13045 2H-12 Federring 13046 HW0301780-A Getriebe 13047 HW9481343-A Welle 13048 ISTW-12 Begrenzung C 13049 HW9482306-E Welle 13050 G280 O-Ring 13051 TSH6-01M Verbindung 23052 UB0605-0.1C Druckluftrohr 23053 Y507212.5 Öldichtung 33054 TAFI405520 Nadellager 13055 HW0401506-1 Platte 32006 HW0100647-1 L Arm 14001 HW0100241-1 U Arm 1
11-6
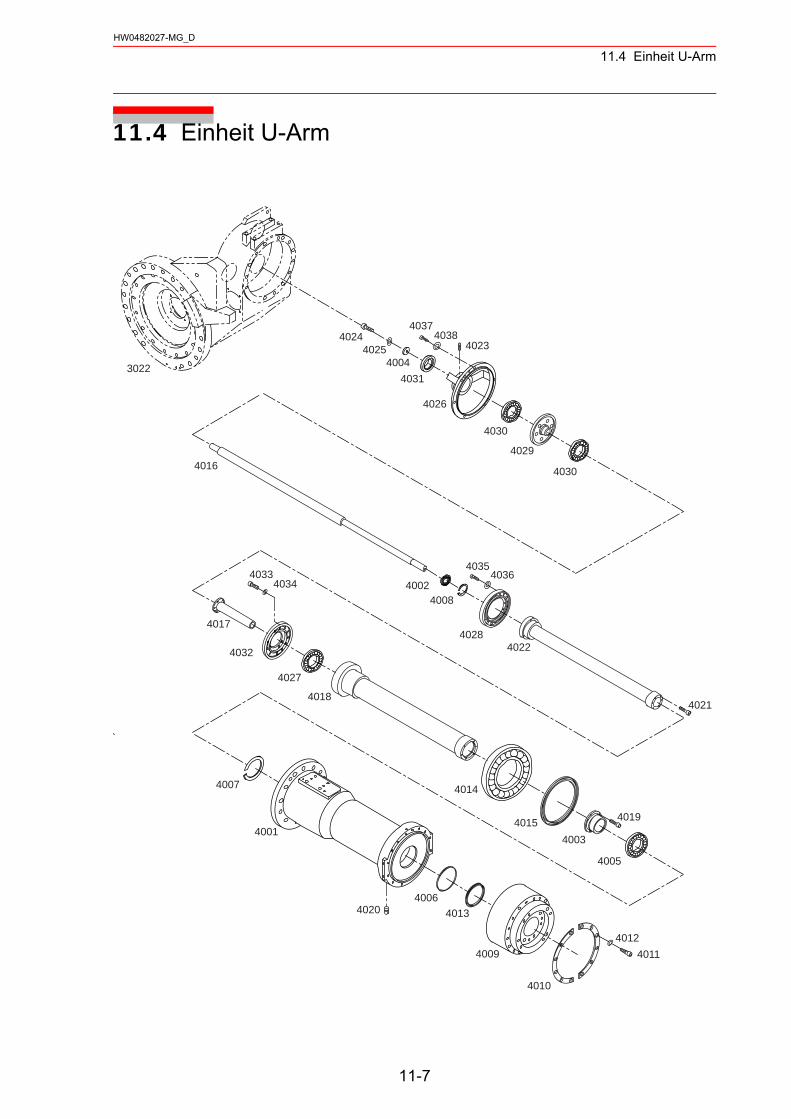
11.4 Einheit U-ArmHW0482027-MG_D
11.4 Einheit U-Arm
4001
4002
4003
4004
4006
4007
4008
4009
4010
40114012
4013
4014
4015
4016
4017
4018
4022
4026
4027
4028
4029
4030
4030
4031
4032
40334034
40354036
40374038
40234024
3022
4025
4019
4020
4021
4005
11-7

11.4 Einheit U-Arm
11-8
HW0482027-MG_D
Nr. DWG Nr. Name Stück
4001 HW0100241-1 U-Arm 14002 6904 Lager 14003 HW0402202-1 Welle 14004 HW0401508-1 Platte 14005 6812LLU Lager 14006 HW0402204-1 Coller 14007 STW-60 Begrenzung C 14008 STW-20 Begrenzung C 14009 HW0380780-A Untersetzungsgetriebe 14010 HW9302581-1 Unterlegscheibe 14011 M12X115 Schraube 124012 2H-12 Federring 124013 AC3204-F2-FKM Öldichtung 14014 HR32017XJ Lager 14015 AC3842-F1-FKM Öldichtung 14016 HW0301234-1 Welle 14017 HW0301237-1 Welle 14018 HW0301236-A Welle 14019 M4X12 Schraube 6
2H-4 Federring 64020 PT1/8 Stopfen 14021 M4X12 Schraube 64022 HW0301235-A Welle 14023 M4X6 H Gewindestift 14024 M8X20 Schraube 14025 2H-8 Federring 14026 HW0100173-2 Gehäuse 14027 HR32013XJ Lager 14028 HW0301971-1 Getriebe 14029 HW0301969-1 Getriebe 14030 HR32006XJ Lager 24031 HW0401505-1 B-Mutter 14032 HW0302100-1 Getriebe 14033 M5X16 Schraube 34034 2H-5 Federring 34035 M5X12 Schraube 34036 2H-5 Federring 34037 M8X20 Schraube 64038 2H-8 Federring 63022 HW0100239-1 Gehäuse 1
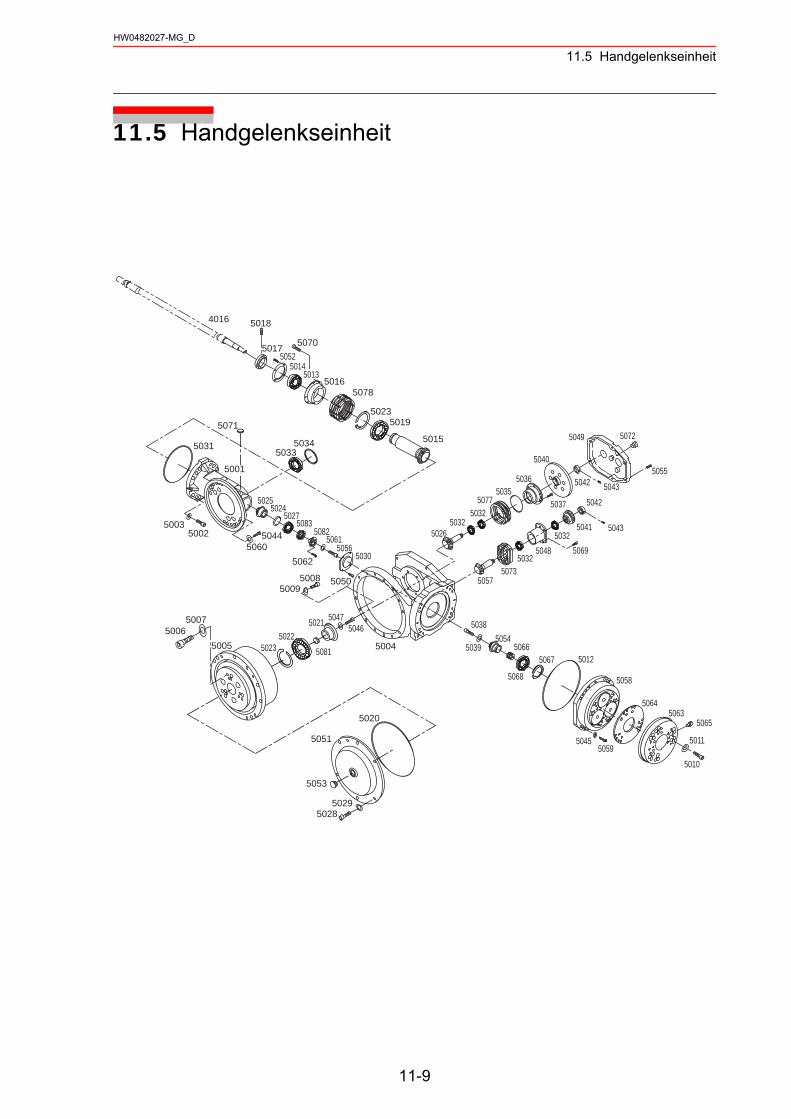
11.5 HandgelenkseinheitHW0482027-MG_D
11.5 Handgelenkseinheit
50025003
500450055006
5007
50085009
5010
5011
5012
5015
50184016
5019
5020
50215022
5023
5023
50245025
5026
5027
50285029
5030
5031
5032
50325032
5032
50335034
50355036
5037
5038
5039
5040
5041
5042
5043
5042 5043
5044
5045
50465047
5048
5049
5050
5051
5053
5054
5057
5058
5059
50605061
5062
50635064
5065
5066
5073
5077
5083
5081
5078
5082
5067
5068
5069
50715072
5055
5056
50145016
50175052
5070
50135013
50015001
11-9
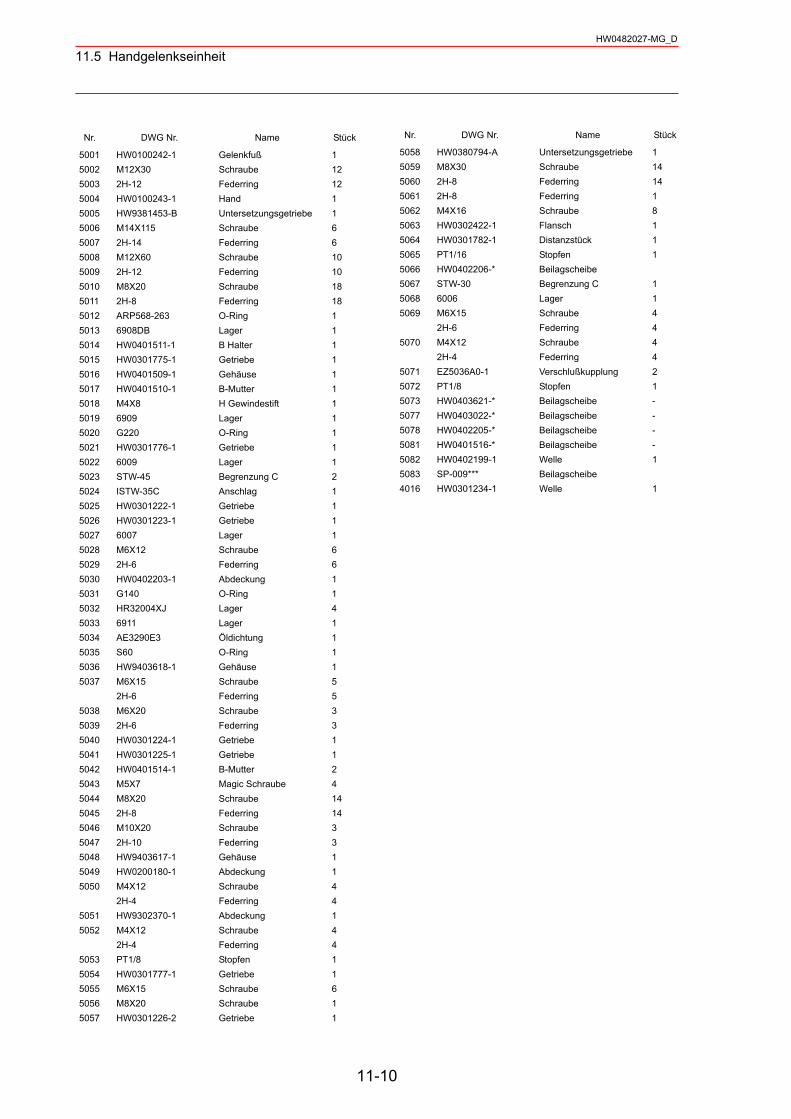
11.5 Handgelenkseinheit
11-10
HW0482027-MG_D
Nr. DWG Nr. Name Stück
5001 HW0100242-1 Gelenkfuß 15002 M12X30 Schraube 125003 2H-12 Federring 125004 HW0100243-1 Hand 15005 HW9381453-B Untersetzungsgetriebe 15006 M14X115 Schraube 65007 2H-14 Federring 65008 M12X60 Schraube 105009 2H-12 Federring 105010 M8X20 Schraube 185011 2H-8 Federring 185012 ARP568-263 O-Ring 15013 6908DB Lager 15014 HW0401511-1 B Halter 15015 HW0301775-1 Getriebe 15016 HW0401509-1 Gehäuse 15017 HW0401510-1 B-Mutter 15018 M4X8 H Gewindestift 15019 6909 Lager 15020 G220 O-Ring 15021 HW0301776-1 Getriebe 15022 6009 Lager 15023 STW-45 Begrenzung C 25024 ISTW-35C Anschlag 15025 HW0301222-1 Getriebe 15026 HW0301223-1 Getriebe 15027 6007 Lager 15028 M6X12 Schraube 65029 2H-6 Federring 65030 HW0402203-1 Abdeckung 15031 G140 O-Ring 15032 HR32004XJ Lager 45033 6911 Lager 15034 AE3290E3 Öldichtung 15035 S60 O-Ring 15036 HW9403618-1 Gehäuse 15037 M6X15 Schraube 5
2H-6 Federring 55038 M6X20 Schraube 35039 2H-6 Federring 35040 HW0301224-1 Getriebe 15041 HW0301225-1 Getriebe 15042 HW0401514-1 B-Mutter 25043 M5X7 Magic Schraube 45044 M8X20 Schraube 145045 2H-8 Federring 145046 M10X20 Schraube 35047 2H-10 Federring 35048 HW9403617-1 Gehäuse 15049 HW0200180-1 Abdeckung 15050 M4X12 Schraube 4
2H-4 Federring 45051 HW9302370-1 Abdeckung 15052 M4X12 Schraube 4
2H-4 Federring 45053 PT1/8 Stopfen 15054 HW0301777-1 Getriebe 15055 M6X15 Schraube 65056 M8X20 Schraube 15057 HW0301226-2 Getriebe 1
Nr. DWG Nr. Name Stück
5058 HW0380794-A Untersetzungsgetriebe 15059 M8X30 Schraube 145060 2H-8 Federring 145061 2H-8 Federring 15062 M4X16 Schraube 85063 HW0302422-1 Flansch 15064 HW0301782-1 Distanzstück 15065 PT1/16 Stopfen 15066 HW0402206-* Beilagscheibe5067 STW-30 Begrenzung C 15068 6006 Lager 15069 M6X15 Schraube 4
2H-6 Federring 45070 M4X12 Schraube 4
2H-4 Federring 45071 EZ5036A0-1 Verschlußkupplung 25072 PT1/8 Stopfen 15073 HW0403621-* Beilagscheibe -5077 HW0403022-* Beilagscheibe -5078 HW0402205-* Beilagscheibe -5081 HW0401516-* Beilagscheibe -5082 HW0402199-1 Welle 15083 SP-009*** Beilagscheibe4016 HW0301234-1 Welle 1

11.6 AusgleichszylinderHW0482027-MG_D
11.6 Ausgleichszylinder
2041
2042
2044
2045
2046
2043
20472048
6001
6002
6017
6003
6004
6005
6006
6007
6008
6009
6010
6011
6018
6012
6012
6013 6014
60156016
6003
2006
11-11
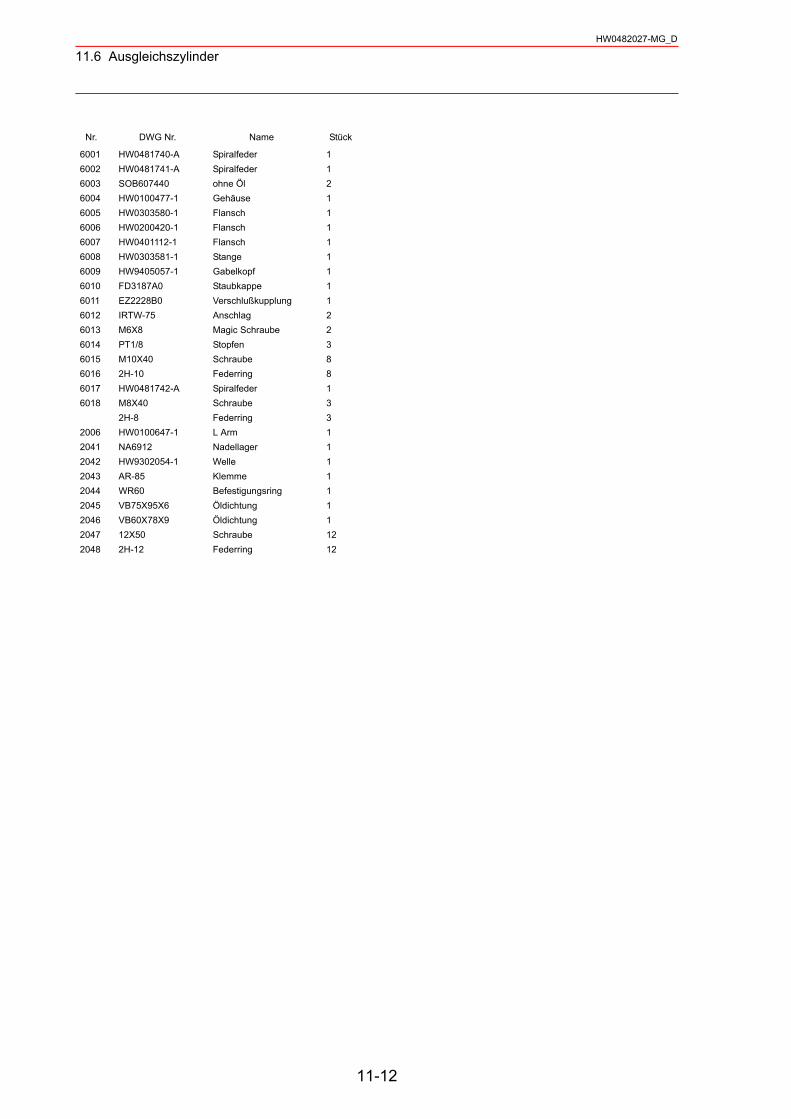
11.6 Ausgleichszylinder
11-12
HW0482027-MG_D
Nr. DWG Nr. Name Stück
6001 HW0481740-A Spiralfeder 16002 HW0481741-A Spiralfeder 16003 SOB607440 ohne Öl 26004 HW0100477-1 Gehäuse 16005 HW0303580-1 Flansch 16006 HW0200420-1 Flansch 16007 HW0401112-1 Flansch 16008 HW0303581-1 Stange 16009 HW9405057-1 Gabelkopf 16010 FD3187A0 Staubkappe 16011 EZ2228B0 Verschlußkupplung 16012 IRTW-75 Anschlag 26013 M6X8 Magic Schraube 26014 PT1/8 Stopfen 36015 M10X40 Schraube 86016 2H-10 Federring 86017 HW0481742-A Spiralfeder 16018 M8X40 Schraube 3
2H-8 Federring 32006 HW0100647-1 L Arm 12041 NA6912 Nadellager 12042 HW9302054-1 Welle 12043 AR-85 Klemme 12044 WR60 Befestigungsring 12045 VB75X95X6 Öldichtung 12046 VB60X78X9 Öldichtung 12047 12X50 Schraube 122048 2H-12 Federring 12

HeadquartersMOTOMAN robotec Gmb
Kammerfeldstraße 1
D-85391 Allershausen, D
Telefon 0 81 66/90-0
Telefax 0 81 66/90-103
Your nearest
YASKAWA Electric CJP 2-1, Kurosaki-shiroish
Yahatanishi-ku
Kitakyushu 806-0004+093-645-8801
MOTOMAN GroupA MOTOMAN robotec G
Wien +43-1-707-9324-1
CZ MOTOMAN robotec sPrag +420-235-302814
D MOTOMAN robotec GAllershausen +49-8166-
MOTOMAN robotec GFrankfurt +49-6173-607
DK MOTOMAN Robotics Tilst +45 7022 2477
E MOTOMAN Robotics Barcelona +34-93-63034
F MOTOMAN Robotics Nantes +33-2-40131919
FIN MOTOMAN Robotics Turku +358-403000600
GB MOTOMAN Robotics Banbury +44-1295-2727
I MOTOMAN Robotics Modena +39-059-28049
NL MOTOMAN benelux BBreda +31-76-5302305
P MOTOMAN Robotics Aveiro +351-234-943 90
SE MOTOMAN Robotics Kalmar +46-480-417800
MOTOMAN Robotics Torsas +46-480-417800
SI MOTOMAN robotec dRibnica +386-1-8372350
Ristro d.o.o.Ribnica +386-1-8372350
We reserve the rig
MOTOMAN representative
orporationi
H
eutschland
www.motoman.de · e-Mail: [email protected]
Marketing & TrainingMOTOMAN robotec GmbH
Im Katzenforst 2
D-61476 Kronberg
Telefon 0 61 73/60 77 30
Telefax 0 61 73/60 77 39
mbH5
.r.o.
mbH90-0
mbH730
Europe AB
Iberica S.L. 78
S.A.
Finland Oy
UK Ltd55
Italia SRL6
.V.
Iberica S.L. 0
Europe AB
Europe AB
.o.o.
DistributorsCH Messer Schweißtechnik AG
Dällikon +41-1-8471717
CZ Sp-Tech s.r.o. Nymburk +420-325-515105
GR Kouvalias Industrial Robots Kallithea +30-210-9589234
H Rehm Hegesztéstechnika Kft Budapest +36-30-9510065
IL KNT Engineering Ltd Kfar Azar +972-39231944
N Robia AS Hokksund +47-32252820
PL RYWAL-RHC Toru n +48-56-6693841
ZA Robotic Systems SA PTY Ltd Johannesburg +27-11-6083182
ht to make any alterations in the course of technical progress



![MOTOMAN SDA-Serie - MPL · PDF fileTechnische Daten SDA10D, SDA10F Achsen Maximaler Arbeitsbereich [º] Maximale Geschwindigkeit [º/sec.] Maximales Drehmoment [Nm] Maximales Trägheitsmoment](https://cdn.vdokument.com/doc/165x107/5aaff5d27f8b9a59478dfe15/motoman-sda-serie-mpl-daten-sda10d-sda10f-achsen-maximaler-arbeitsbereich-.jpg)
![PowerPoint 프레젠테이션 - KEEI · Twisted jacket [Keystone] Sub-items Novel anchoring System (Glostenl Concrete foundation [Gifford team] sensor SCADA Server 1 rd yr rd yr Deve10D](https://cdn.vdokument.com/doc/165x107/5fb32bd3920b8b41421c3ec7/powerpoint-eoe-twisted-jacket-keystone-sub-items-novel-anchoring.jpg)


