Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 1
VDI: XML in Automation

Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 2
Robert Landwehr, Christoph Gönnheimer, Torsten Volkmann
Institut für Werkzeugmaschinen und Betriebstechnik
Verbesserung der Interoperabilitätvon Industrial-EthernetfähigenAutomatisierungskomponenten
mit XML und [email protected]@mach.uni--karlsruhe.dekarlsruhe.de
[email protected]@mach.uni--karlsruhe.dekarlsruhe.deinfo@[email protected]

Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 3
Referenten
ChristophChristophGönnheimerGönnheimer
TorstenTorstenVolkmannVolkmann
Institut fürWerkzeugmaschinen und Betriebstechnik (wbk)
Universität Karlsruhe (TH)
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 4
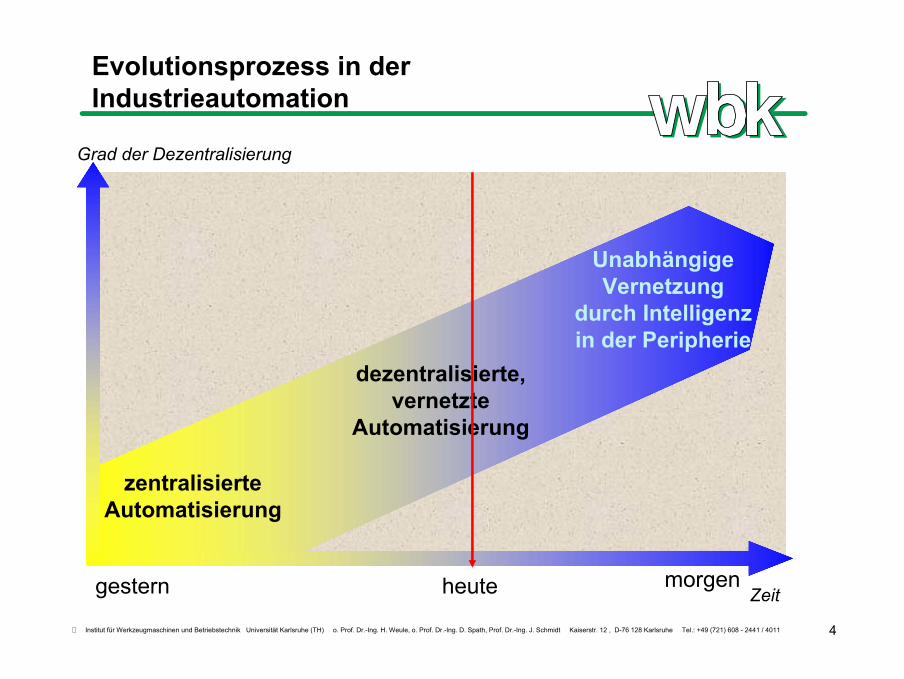
Evolutionsprozess in der Industrieautomation
zentralisierteAutomatisierung
dezentralisierte,vernetzte
Automatisierung
heutegestern morgen
Unabhängige Vernetzung
durch Intelligenz in der Peripherie
Zeit
Grad der Dezentralisierung
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 5
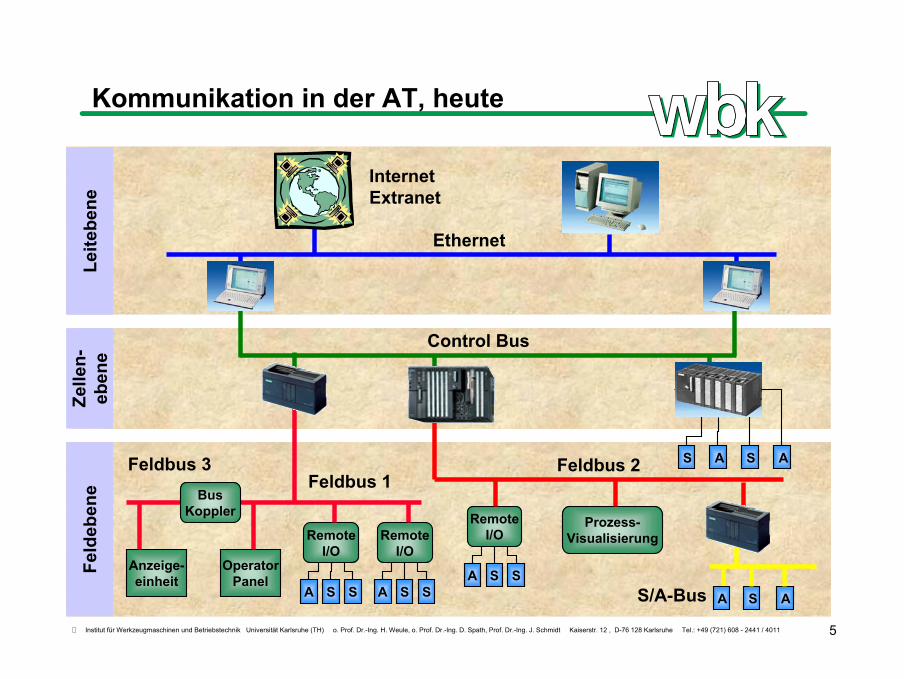
Kommunikation in der AT, heuteFe
ldeb
ene
Leite
bene
Zelle
n-eb
ene
Anzeige-einheit SA S
RemoteI/O
A S A
Prozess-Visualisierung
Feldbus 2
S/A-Bus
BusKoppler
Feldbus 3Feldbus 1
SA S
RemoteI/O
SA S
RemoteI/O
OperatorPanel
Control Bus
S A A
Ethernet
InternetExtranet
S
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 6
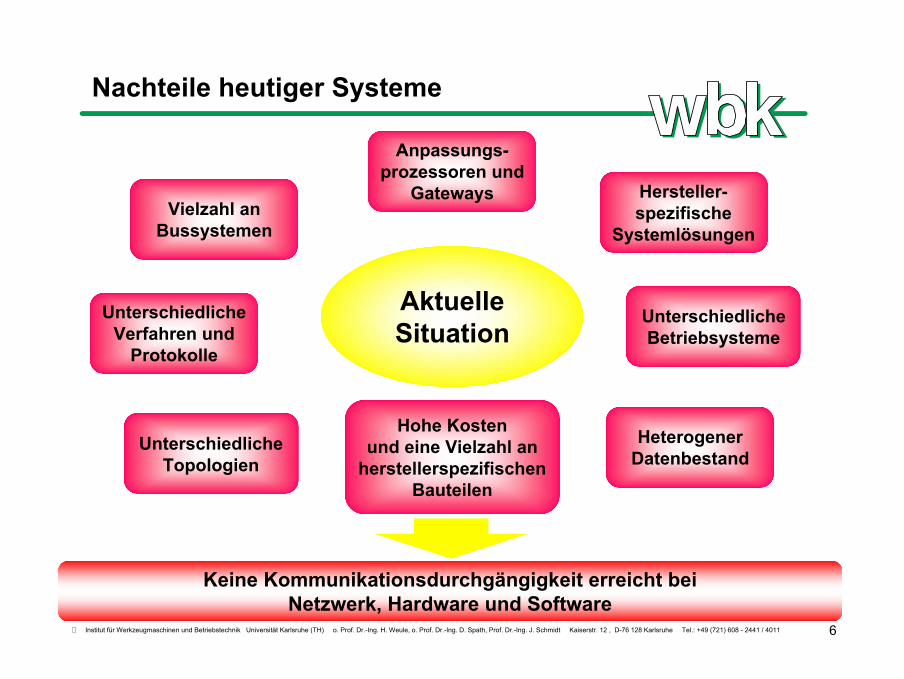
Nachteile heutiger Systeme
Vielzahl an Bussystemen
Unterschiedliche Verfahren und
Protokolle
Keine Kommunikationsdurchgängigkeit erreicht beiNetzwerk, Hardware und Software
Hersteller-spezifische
Systemlösungen
Unterschiedliche Betriebsysteme
AktuelleSituation
Unterschiedliche Topologien
Anpassungs-prozessoren und
Gateways
Heterogener Datenbestand
Hohe Kostenund eine Vielzahl an
herstellerspezifischen Bauteilen
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 7
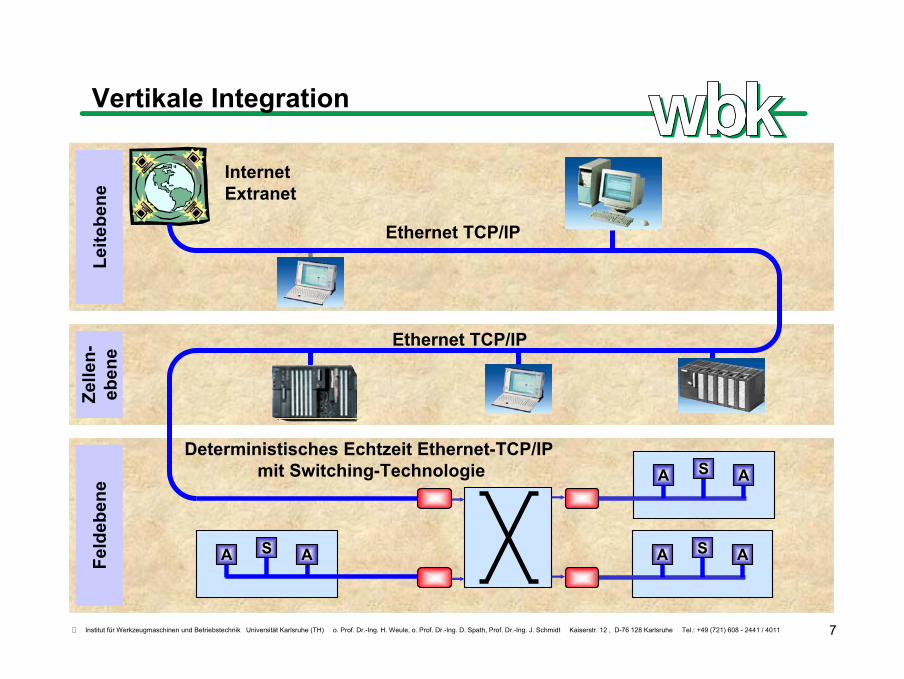
Vertikale IntegrationFe
ldeb
ene
Leite
bene
Zelle
n-eb
ene
Ethernet TCP/IP
Ethernet TCP/IP
InternetExtranet
Deterministisches Echtzeit Ethernet-TCP/IPmit Switching-Technologie
AA S AA S
AA S
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 8
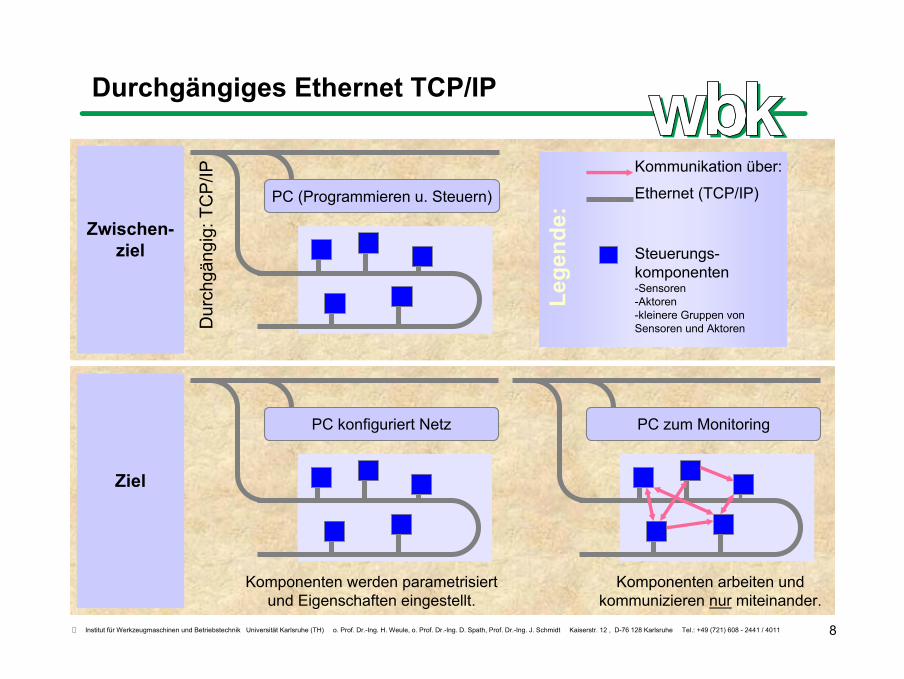
Durchgängiges Ethernet TCP/IP
Steuerungs-komponenten-Sensoren-Aktoren-kleinere Gruppen von Sensoren und Aktoren
Ethernet (TCP/IP)
Lege
nde:Zwischen-
ziel
PC (Programmieren u. Steuern)D
urch
gäng
ig: T
CP/
IP
Ziel
PC konfiguriert Netz PC zum Monitoring
Komponenten werden parametrisiert und Eigenschaften eingestellt.
Komponenten arbeiten und kommunizieren nur miteinander.
Kommunikation über:
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 9
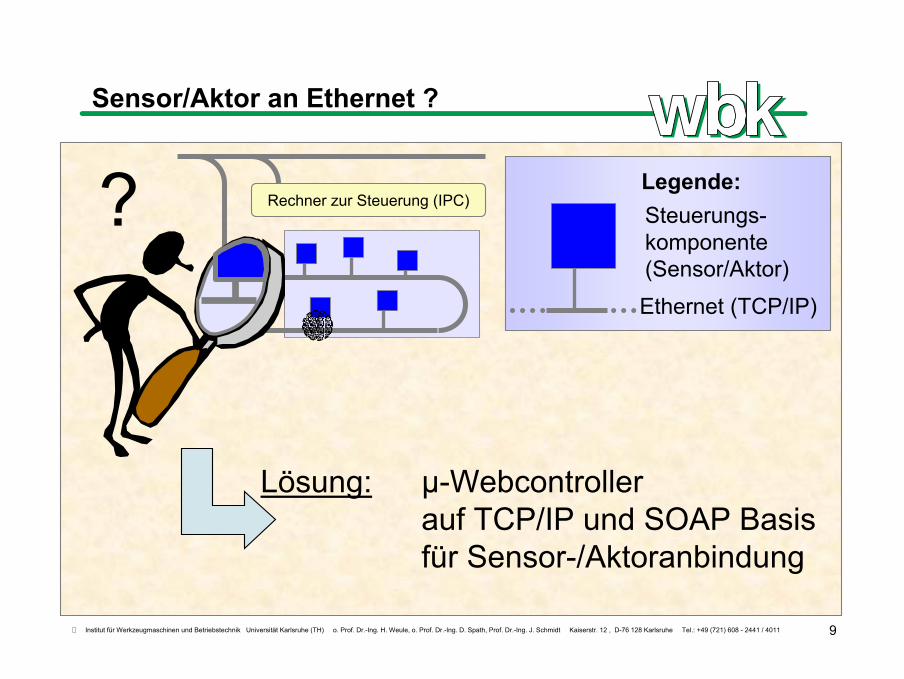
Sensor/Aktor an Ethernet ?
Rechner zur Steuerung (IPC)? Legende:Steuerungs-komponente(Sensor/Aktor)Ethernet (TCP/IP)
Lösung: µ-Webcontroller auf TCP/IP und SOAP Basisfür Sensor-/Aktoranbindung
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 10
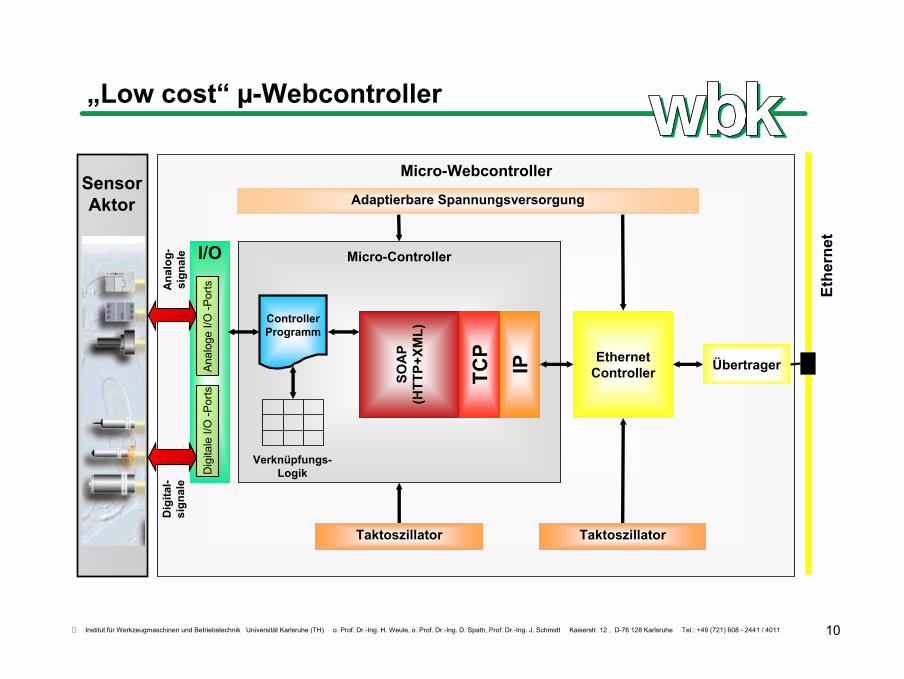
„Low cost“ µ-Webcontroller
Micro-Webcontroller
Ethernet Controller Übertrager
Micro-Controller
Controller Programm
Verknüpfungs-Logik
Taktoszillator
Ethe
rnet
TaktoszillatorIPTC
P
SOA
P (H
TTP+
XML)
Adaptierbare Spannungsversorgung
Anal
og-
sign
ale
Dig
itale
I/O
-Por
tsAn
alog
e I/O
-Por
ts
Dig
ital-
sign
ale
SensorAktor
I/O
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 11
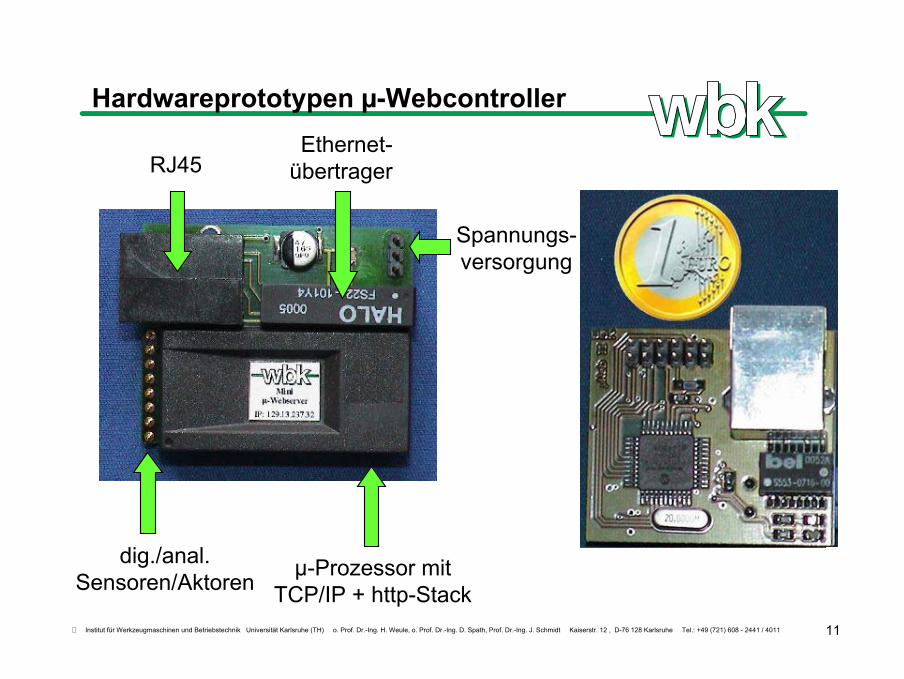
Hardwareprototypen µ-Webcontroller
RJ45Ethernet-
übertrager
Spannungs-versorgung
µ-Prozessor mitTCP/IP + http-Stack
dig./anal.Sensoren/Aktoren
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 12
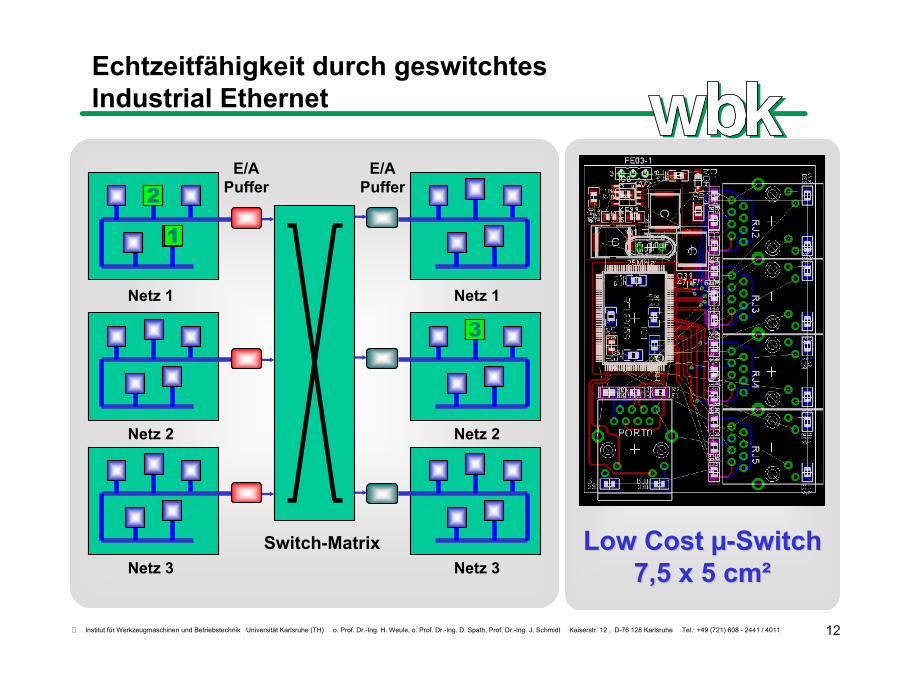
Echtzeitfähigkeit durch geswitchtesIndustrial Ethernet
1 . . 10
1 . . . 10
1...10 Endgeräte (20 Mbit/s)
(200 Mbit/s)
(2 Gbit/s)
Beispiel: 1000 EndgeräteUnkritische GesamtverzögerungProblem:
Hohe Kostenmany-to-one-traffic
Switch-Matrix
Netz 1
Netz 2
Netz 3
Netz 1
Netz 2
Netz 3
E/APuffer
1
2
3
E/APuffer
LowLow CostCost µµ--SwitchSwitch7,5 x 5 cm²7,5 x 5 cm²
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 13
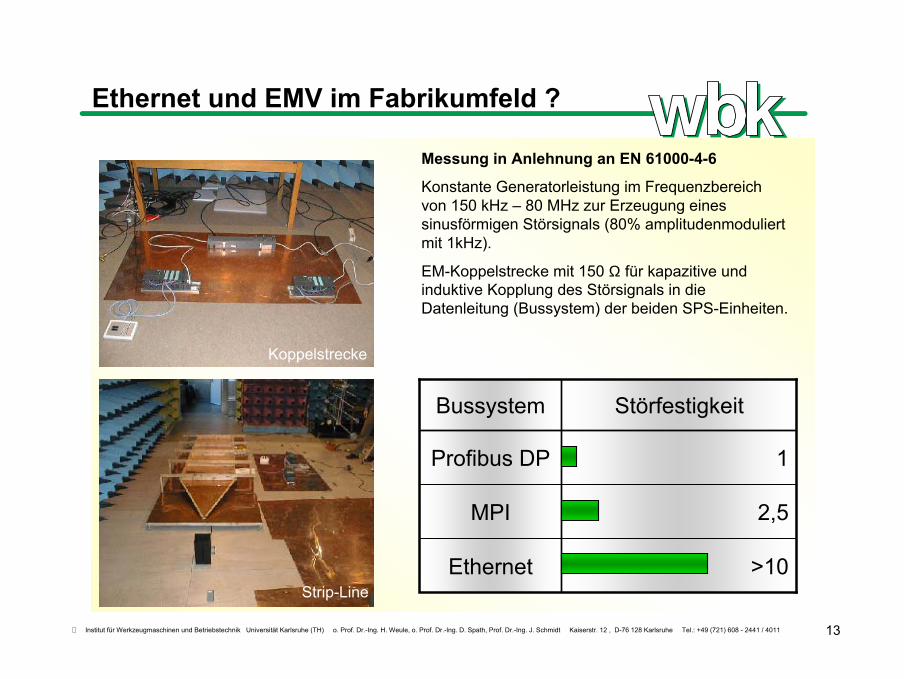
Ethernet und EMV im Fabrikumfeld ?
>10Ethernet
2,5MPI
1Profibus DP
StörfestigkeitBussystem
Koppelstrecke
EM-Koppelstrecke
Messung in Anlehnung an EN 61000-4-6
Konstante Generatorleistung im Frequenzbereich von 150 kHz – 80 MHz zur Erzeugung eines sinusförmigen Störsignals (80% amplitudenmoduliert mit 1kHz).
EM-Koppelstrecke mit 150 Ω für kapazitive und induktive Kopplung des Störsignals in die Datenleitung (Bussystem) der beiden SPS-Einheiten.
Strip-Line

Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 14
Ethernet + Twisted Pair
Eg
Zg
ComponentComponent 11Plug Shield Shield Plug
ComponentComponent 22Drain wire
Cable
RL__++
1 Twist
__++__
RL__
++
1 Twist
__++
__
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 15
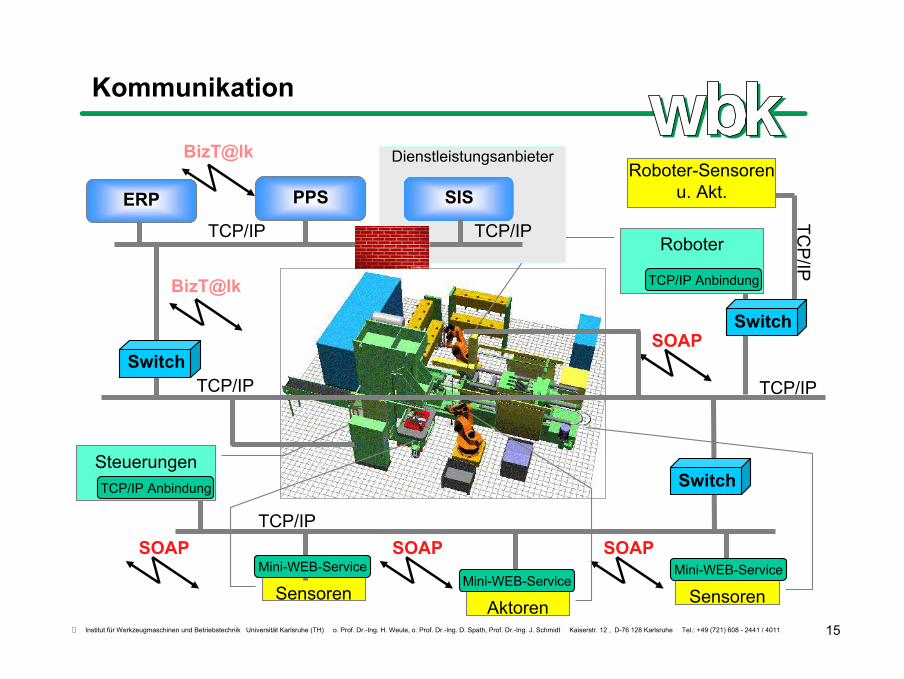
Kommunikation
BizT@lk
BizT@lk
SOAP
SOAPSOAPSOAP
SensorenSensorenAktoren
Steuerungen
Roboter-Sensoren u. Akt.
Roboter
Mini-WEB-ServiceMini-WEB-Service
Mini-WEB-Service
TCP/IP Anbindung
TCP/IP Anbindung
TCP/IP
TCP/IP TCP/IP
TCP/IP
ERP PPS
TCP/IP
Switch
Switch
Switch
Dienstleistungsanbieter
SIS
TCP/IP
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 16
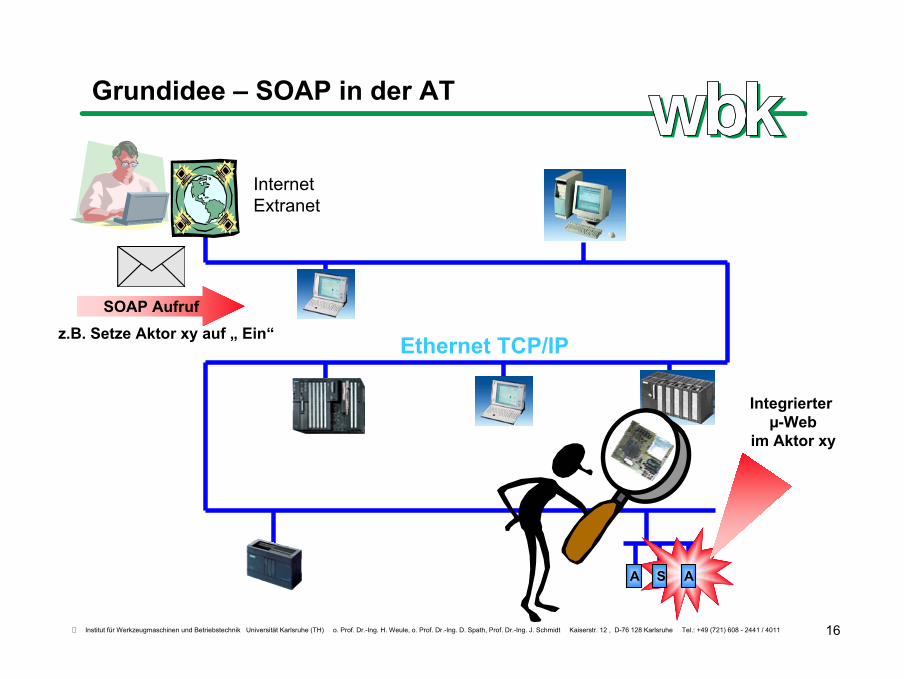
Grundidee – SOAP in der AT
A S A
Ethernet TCP/IP
InternetExtranet
SOAP Aufrufz.B. Setze Aktor xy auf „ Ein“
Integrierterµ-Web
im Aktor xy
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 17
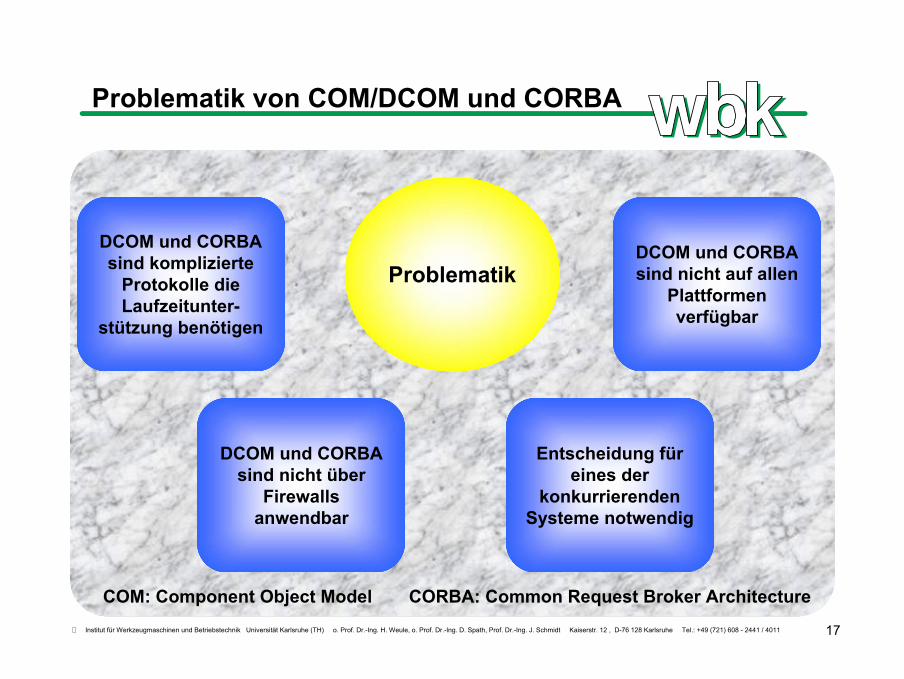
Problematik von COM/DCOM und CORBA
DCOM und CORBA sind komplizierte
Protokolle die Laufzeitunter-
stützung benötigen
Problematik
DCOM und CORBA sind nicht über
Firewallsanwendbar
Entscheidung für eines der
konkurrierenden Systeme notwendig
DCOM und CORBA sind nicht auf allen
Plattformen verfügbar
COM: Component Object Model CORBA: Common Request Broker Architecture
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 18
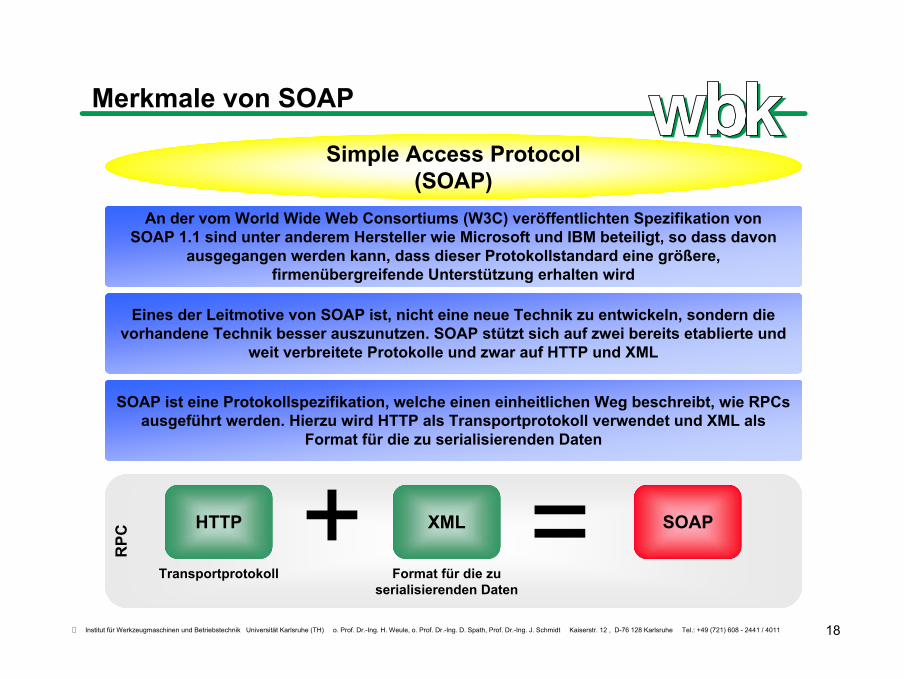
Merkmale von SOAPR
PC + = SOAPXML
Format für die zu serialisierenden Daten
HTTP
Transportprotokoll
An der vom World Wide Web Consortiums (W3C) veröffentlichten Spezifikation vonSOAP 1.1 sind unter anderem Hersteller wie Microsoft und IBM beteiligt, so dass davon
ausgegangen werden kann, dass dieser Protokollstandard eine größere, firmenübergreifende Unterstützung erhalten wird
Simple Access Protocol(SOAP)
Eines der Leitmotive von SOAP ist, nicht eine neue Technik zu entwickeln, sondern die vorhandene Technik besser auszunutzen. SOAP stützt sich auf zwei bereits etablierte und
weit verbreitete Protokolle und zwar auf HTTP und XML
SOAP ist eine Protokollspezifikation, welche einen einheitlichen Weg beschreibt, wie RPCs ausgeführt werden. Hierzu wird HTTP als Transportprotokoll verwendet und XML als
Format für die zu serialisierenden Daten
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 19
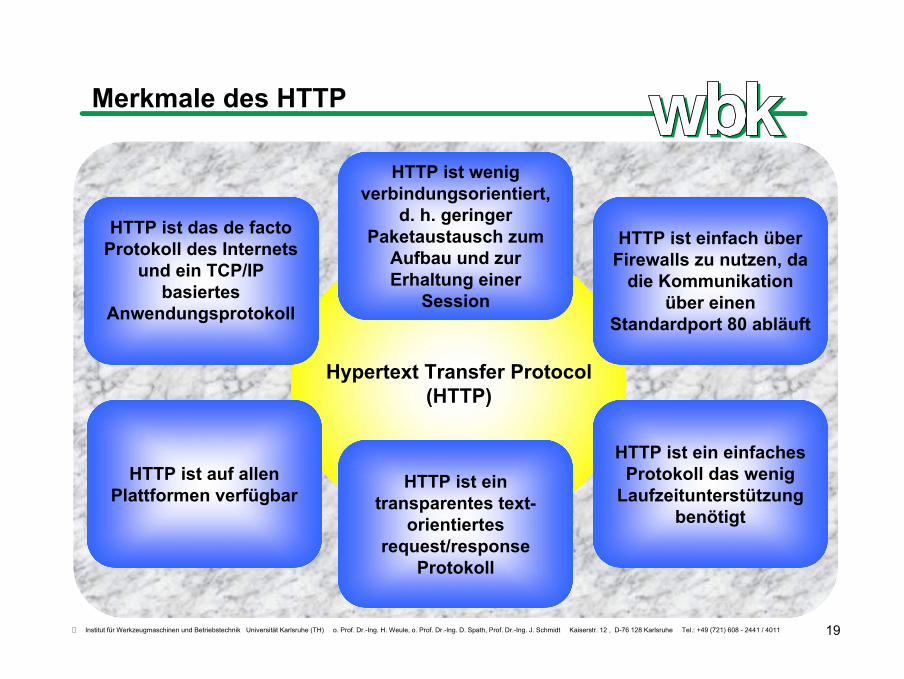
Merkmale des HTTP
Hypertext Transfer Protocol(HTTP)
HTTP ist das de facto Protokoll des Internets
und ein TCP/IP basiertes
Anwendungsprotokoll
HTTP ist auf allen Plattformen verfügbar
HTTP ist einfach über Firewalls zu nutzen, da
die Kommunikation über einen
Standardport 80 abläuft
HTTP ist ein einfaches Protokoll das wenig
Laufzeitunterstützung benötigt
HTTP ist wenig verbindungsorientiert,
d. h. geringer Paketaustausch zum
Aufbau und zur Erhaltung einer
Session
HTTP ist ein transparentes text-
orientiertes request/response
Protokoll
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 20
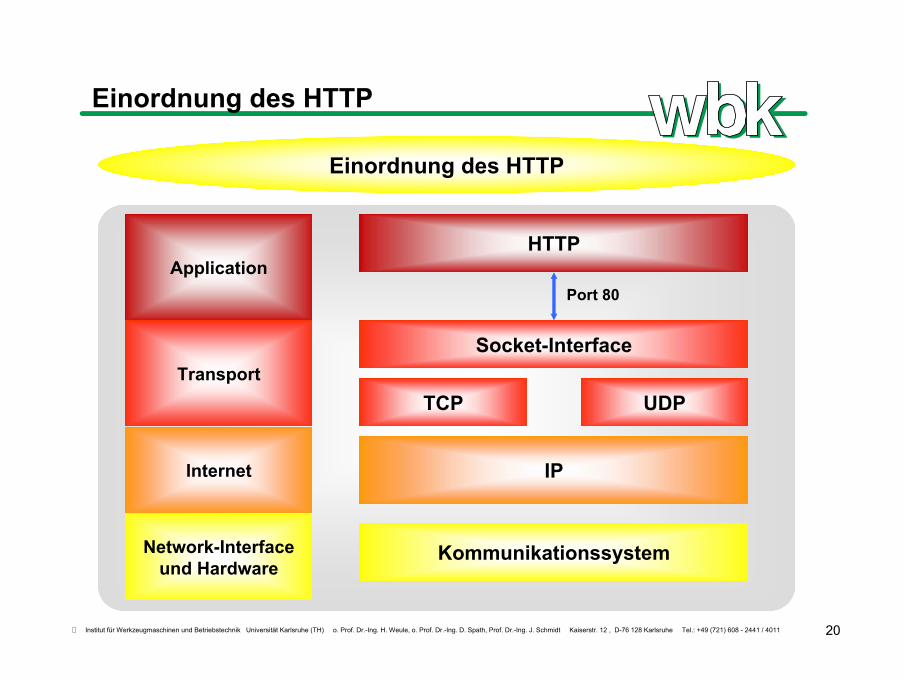
Einordnung des HTTP
Einordnung des HTTP
KommunikationssystemNetwork-Interface und Hardware
IPInternet
TCP UDP
Socket-InterfaceTransport
HTTPApplication
Port 80
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 21
Merkmale von XML
XML basiert auf der Textform, d. h. die Darstellung der Informationen erfolgt wie auch in HTTP und HTML mit dem ASCII-Zeichensatz. Dadurch ist XML einfach lesbar und transparent. Des weiteren ist eine gute
Portabilität gewährleistet, da die Textform in diesem Aspekt binären Strukturen überlegen ist
Extensible Markup Language(XML)
In XML wird der Inhalt eines Dokumentes von seiner Formatierung getrennt. Es liegt nicht im Mittelpunkt wie Daten dargestellt werden, sondern welche Bedeutung sie haben. Ein reines XML Dokument ist also im
Gegensatz zu einer HTML Seite darstellungsneutral. Mittels einer Transformation kann der Inhalt eines XML Dokumentes jedoch in den unterschiedlichsten gewünschten Formatierungen dargestellt werden
Das Format von XML ist sehr flexibel und erweiterbar. Es können auf unzweideutige Weise beliebige und benutzerdefinierte Elemente hinzugefügt werden
Die Struktur eines XML-Dokumentes kann eindeutig spezifiziert und standardisiert werden, woraus folgt, dass XML-Dokumente validierbar sind. Dadurch ist eine zuverlässige maschinelle Verarbeitung
gewährleistet
XML geht aus der zwischen den Jahren 1978 bis 1986 entwickelten Standard Generalize Markup Language (SGML) hervor, welche von der International Organization for Standardization (ISO) in der
ISO 8879 umgesetzt wurde
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 22
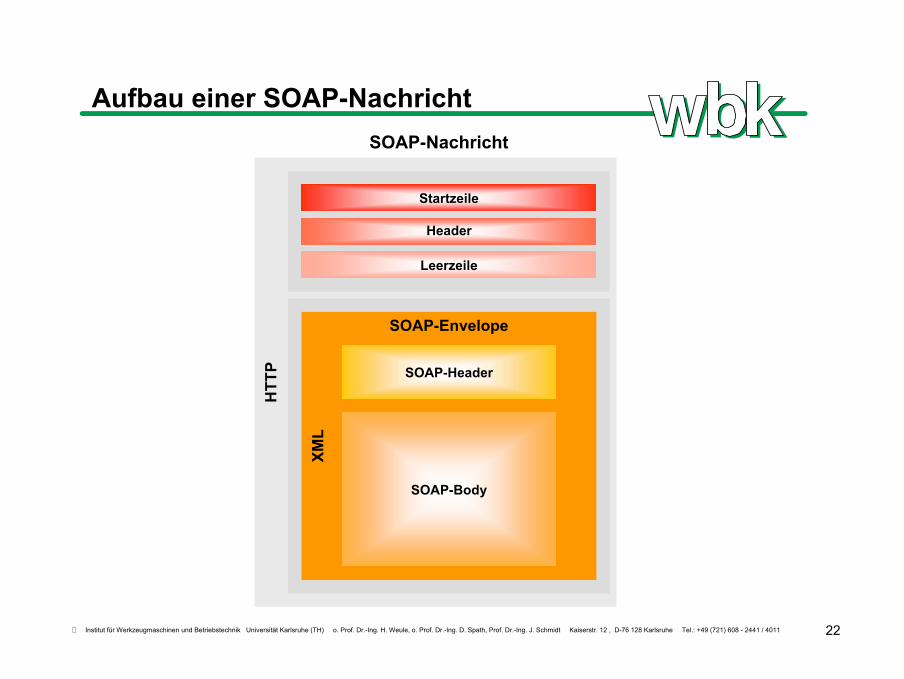
Aufbau einer SOAP-Nachricht
SOAP-Envelope
Startzeile
Header
SOAP-Nachricht
LeerzeileH
TTP SOAP-Header
SOAP-Body
XML

Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 23
Funktionsweise eines SOAP-Aufrufes
Client Anwendung
Client Anwendung
SOAPClient
WebServer
Web-Service Anwendung
Web-Service Anwendung
Firewall Firewall
HTTPInternet
AntwortXML
Parser
SOAPServer
XMLParser
SOAP Envelope
Anfrage
URL Connection Point
Mapping
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 24
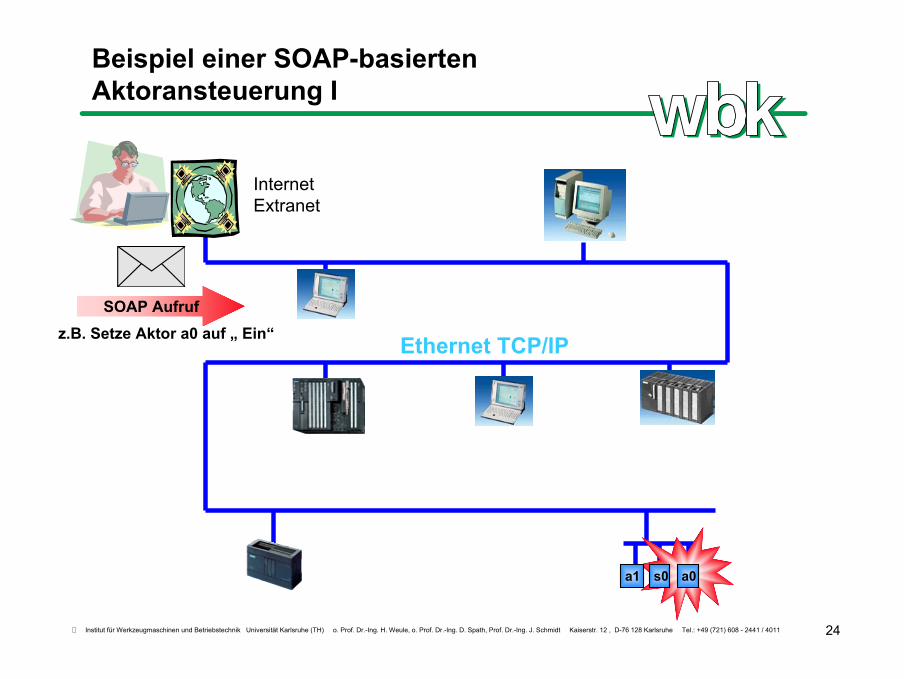
Beispiel einer SOAP-basierten Aktoransteuerung I
a1 s0 a0
Ethernet TCP/IP
InternetExtranet
SOAP Aufrufz.B. Setze Aktor a0 auf „ Ein“
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 25
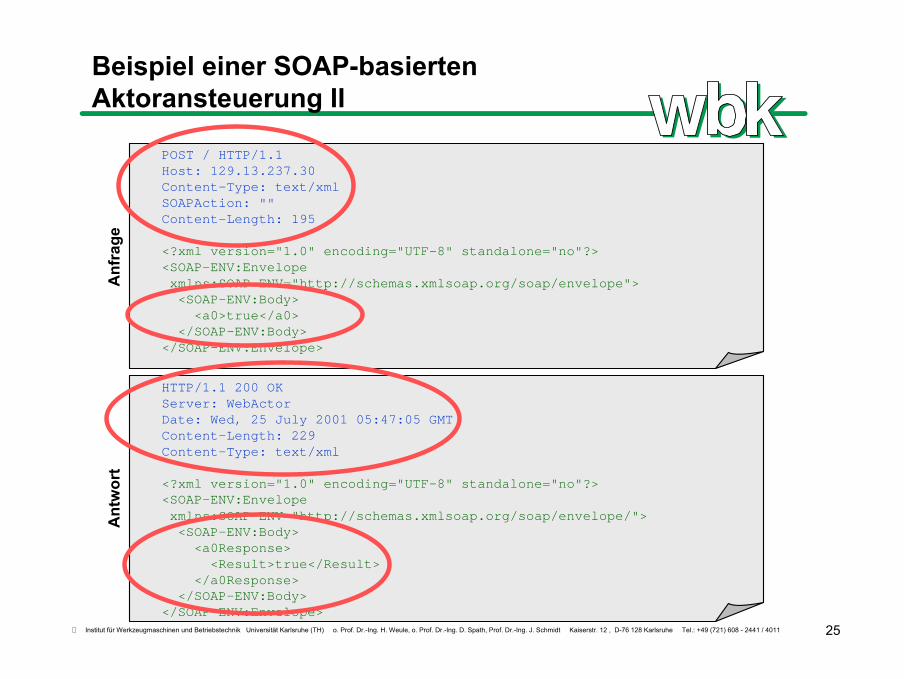
Beispiel einer SOAP-basierten Aktoransteuerung II
POST / HTTP/1.1Host: 129.13.237.30Content-Type: text/xmlSOAPAction: ""Content-Length: 195
<?xml version="1.0" encoding="UTF-8" standalone="no"?><SOAP-ENV:Envelopexmlns:SOAP-ENV="http://schemas.xmlsoap.org/soap/envelope"><SOAP-ENV:Body>
<a0>true</a0></SOAP-ENV:Body>
</SOAP-ENV:Envelope>
Anf
rage
HTTP/1.1 200 OKServer: WebActorDate: Wed, 25 July 2001 05:47:05 GMTContent-Length: 229Content-Type: text/xml
<?xml version="1.0" encoding="UTF-8" standalone="no"?><SOAP-ENV:Envelope xmlns:SOAP-ENV="http://schemas.xmlsoap.org/soap/envelope/"><SOAP-ENV:Body>
<a0Response><Result>true</Result>
</a0Response></SOAP-ENV:Body>
</SOAP-ENV:Envelope>
Ant
wor
t
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 26
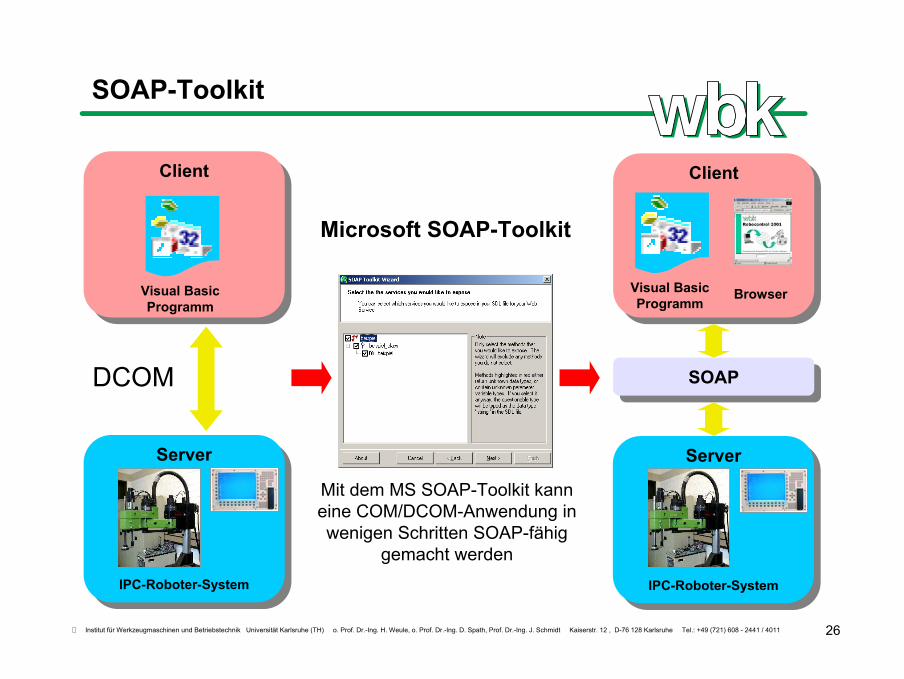
SOAP-Toolkit
Microsoft SOAP-Toolkit
Mit dem MS SOAP-Toolkit kann eine COM/DCOM-Anwendung in wenigen Schritten SOAP-fähig
gemacht werden
ServerServer
ClientClient
IPC-Roboter-System
DCOM
Visual Basic Programm
SOAPSOAP
ClientClient
BrowserVisual Basic Programm
ServerServer
IPC-Roboter-System
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 27
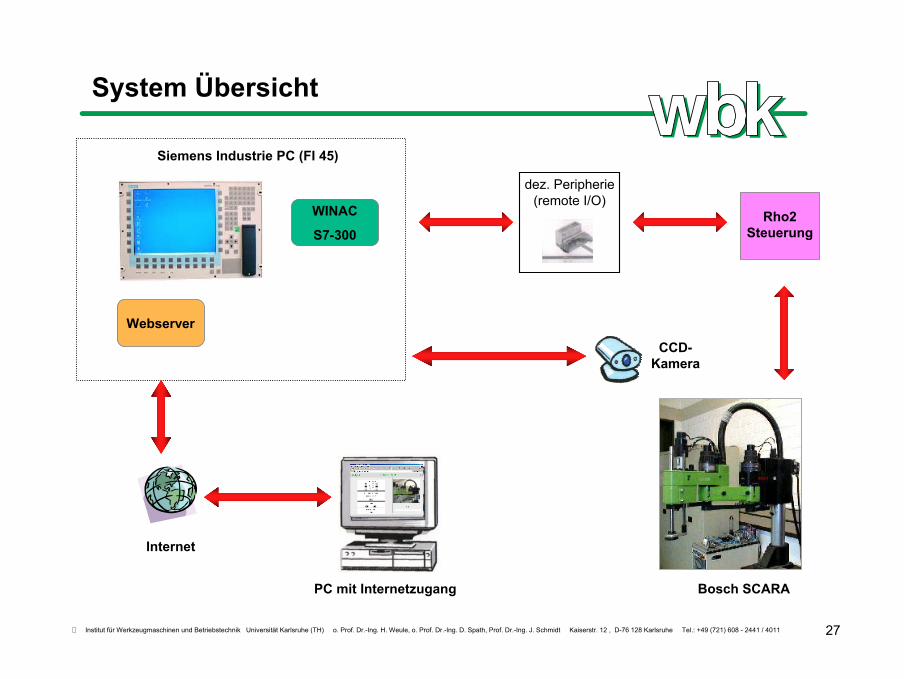
System Übersicht
dez. Peripherie(remote I/O)
PC mit Internetzugang Bosch SCARA
Siemens Industrie PC (FI 45)
Internet
CCD-Kamera
Webserver
WINAC
S7-300Rho2
Steuerung
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 28
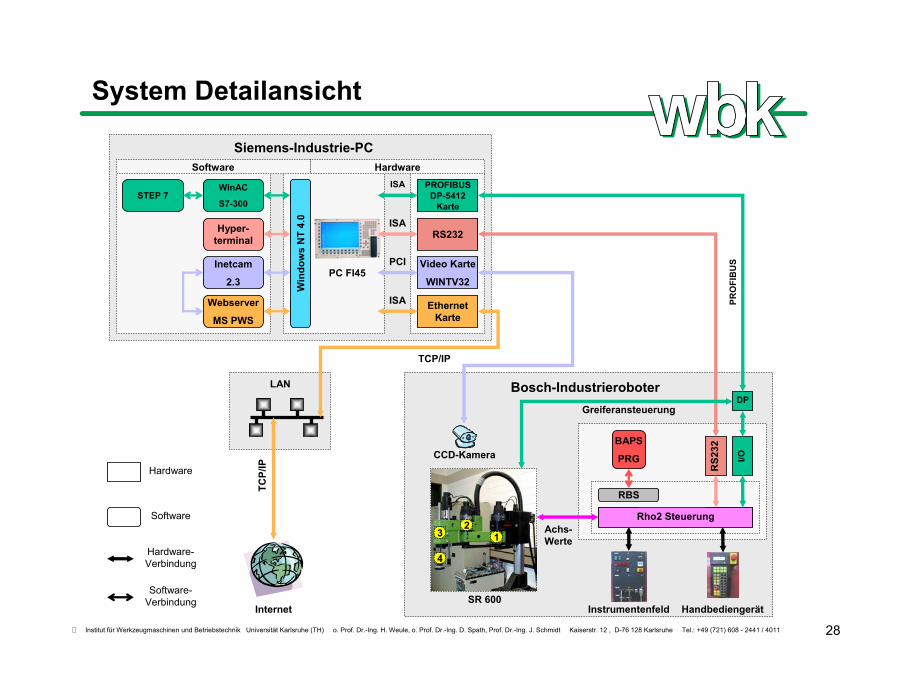
System Detailansicht
Software Hardware
Siemens-Industrie-PC
PC FI45
3 12
4
SR 600
CCD-Kamera
Internet
Bosch-IndustrieroboterLAN
TCP/
IP
Software-Verbindung
Hardware-Verbindung
Software
Hardware
Video Karte
WINTV32
PCIInetcam
2.3
BAPS
PRG
RBS
HandbediengerätInstrumentenfeld
RS232
RS2
32
ISAHyper-terminal
Rho2 Steuerung
Win
dow
s N
T 4.
0Ethernet
Karte
TCP/IP
ISAWebserver
MS PWS
ISA PROFIBUS DP-5412
Karte
DP
PRO
FIB
US
I/O
WinAC
S7-300STEP 7
Greiferansteuerung
Achs-Werte
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 29
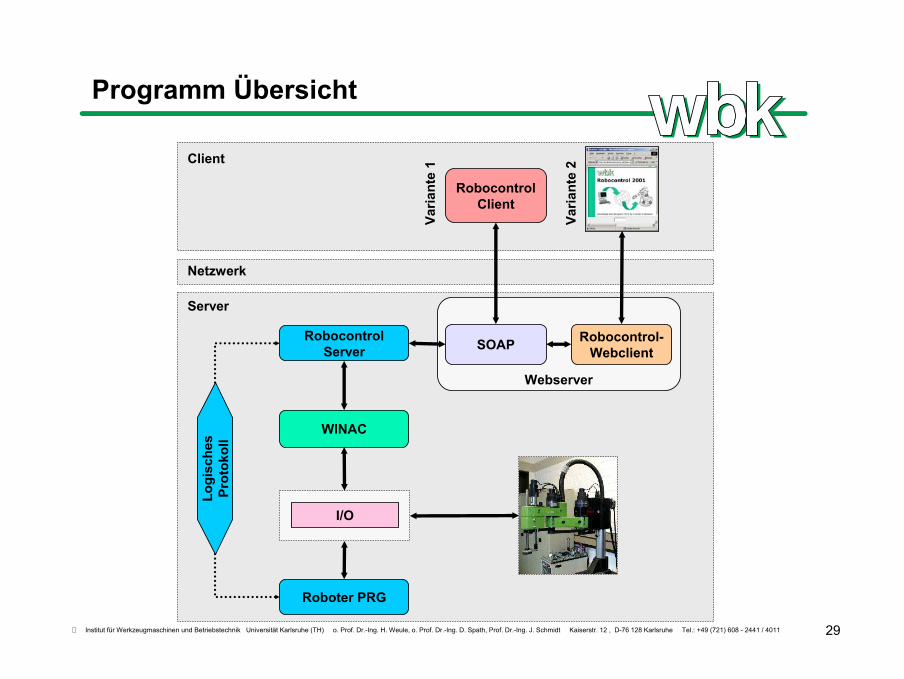
Server
Netzwerk
Client
Webserver
Programm Übersicht
RobocontrolClient
Varia
nte
1
Robocontrol-Webclient
Varia
nte
2
SOAP
WINAC
I/O
Logi
sche
s Pr
otok
oll
RobocontrolServer
Roboter PRG
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 30
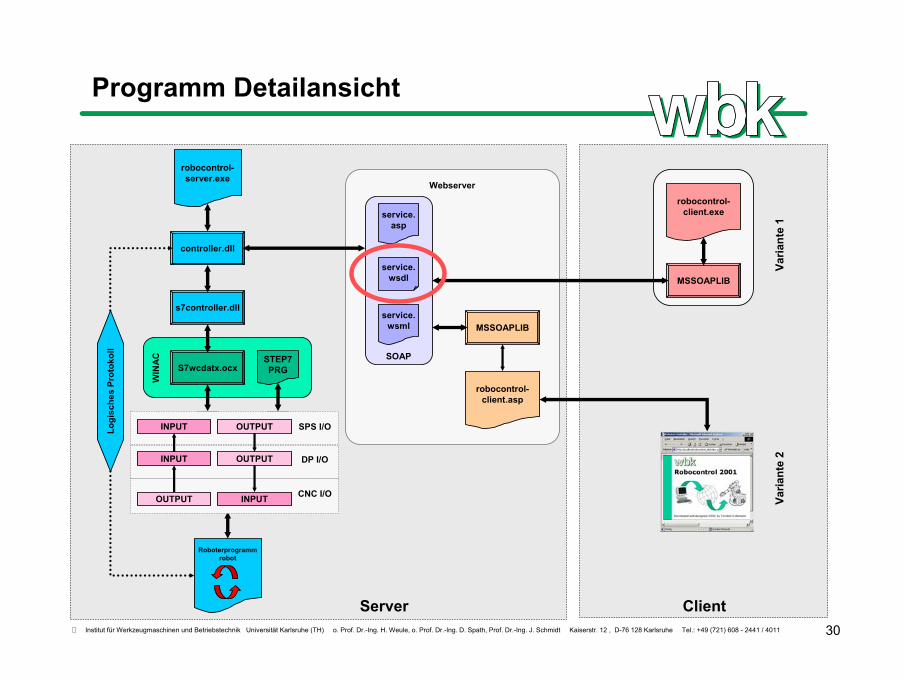
service. wsdl
service.wsml
service. asp
Webserver
MSSOAPLIB
robocontrol-client.asp
SOAP
Programm Detailansicht
robocontrol-server.exe
s7controller.dll
S7wcdatx.ocxSTEP7 PRG
WIN
AC
controller.dll
Roboterprogramm robot
Logi
sche
s Pr
otok
oll
robocontrol-client.exe
MSSOAPLIB
Varia
nte
1Va
riant
e 2
Server Client
DP I/O
CNC I/O
SPS I/O
INPUT
OUTPUT INPUT
OUTPUT
INPUT OUTPUT

Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 31
Versuchstand des SCARA-Montageroboters im wbk
Filme überspringen
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 32
Die Clientanwendung als Visual-Basic Programm
PLAYBACK Nächste Folie
Die Clientanwendung alsVisual-Basic Programm
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 33
Die Clientanwendung als Browservariante
Nächste FoliePLAYBACK
Die Clientanwendung alsBrowservariante
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 34
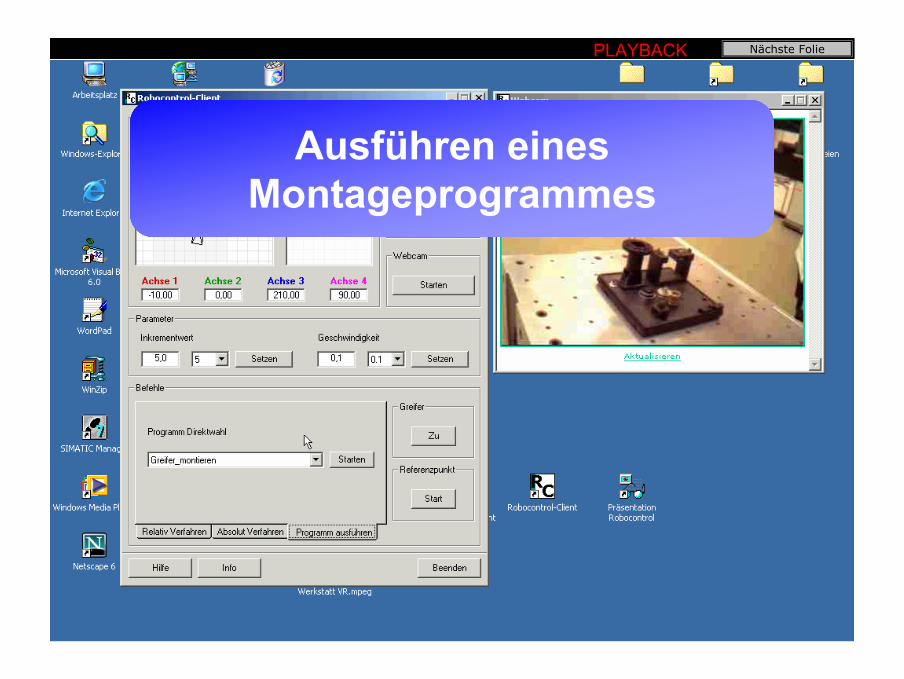
Ausführen eines Montageprogrammes
Nächste FoliePLAYBACK
Ausführen eines Montageprogrammes
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 35
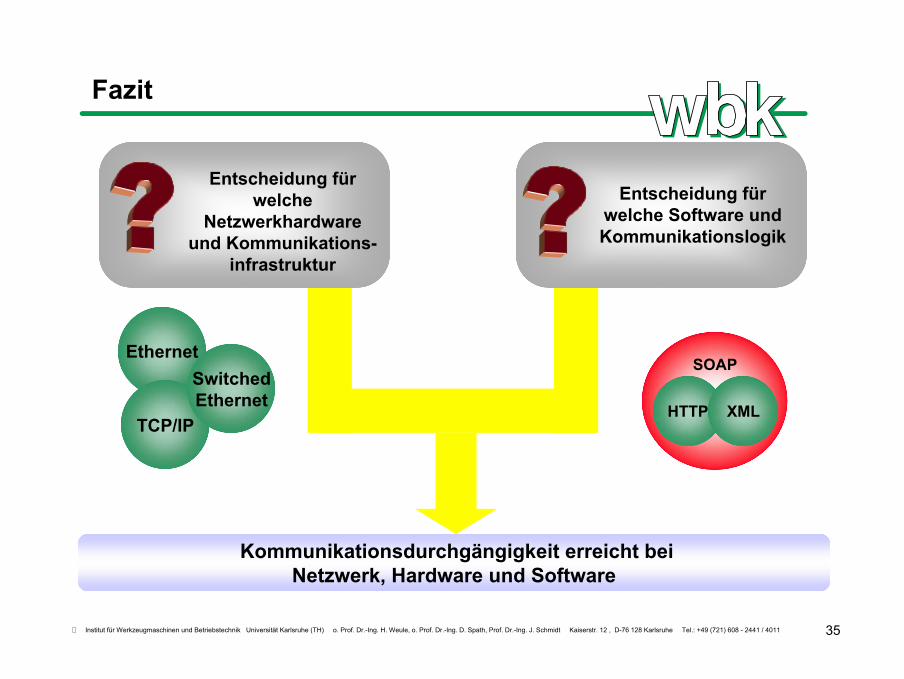
Fazit
SOAP
HTTP XML
Ethernet
TCP/IP
SwitchedEthernet
Kommunikationsdurchgängigkeit erreicht beiNetzwerk, Hardware und Software
Entscheidung für welche Software und Kommunikationslogik
Entscheidung für welche
Netzwerkhardware und Kommunikations-
infrastruktur
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 36
Ausblick
• Weiterentwicklung des Hardwarekonzeptes(µ-Webcontroller mit TCP/IP-Stack)
• SOAP-Anbindung des wbk µ-Webcontrollers• Entwicklung des µ-Switches
SOAP Parser für µ-Webcontroller Echtzeituntersuchungen an SOAP-SteuerungsnetzwerkenKonfiguration der Netzwerke im rauhenindustriellen Umfeld
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 37
Fragen ?
?? ??
??
?? ??
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 38
Weitere Informationen
Online :
• Homepage des Instituts: www-wbk.mach.uni-karlsruhe.de• Infos zum Competence Center am Institut: www.biztalk-center.com• SOAP-Infos von MS: www.microsoft.com/mind/0100/soap/soap.asp• Weitere Infos und Vorträge zum Thema: www.robert-landwehr.de• msdn.microsoft.com/workshop/xml/articles/xmlmanifesto.asp
Literatur :
• Ethernet TCP/IP für die IndustrieautomationFrank J. Furrer, Hüthig-Verlag
• Switched and Fast EthernetBreyer, Robert; Riley Sean, MacMillan Computer Publishing Emeryville, USA 2nd Edition, 1999, ISBN 1-56276-426-8
• Ethernet-TCP/IP: Hindernisse, Lösungen und Chancen für ein neuartiges SteuerungsnetzSpath, D.; Landwehr, R.; Gönnheimer, C., Kongress zur SPS/IPC/DRIVES 2000 - Elektrische Automatisierungstechnik - Systeme und Komponenten, November 2000, Nürnberg
Institut für Werkzeugmaschinen und Betriebstechnik Universität Karlsruhe (TH) o. Prof. Dr.-Ing. H. Weule, o. Prof. Dr.-Ing. D. Spath, Prof. Dr.-Ing. J. Schmidt Kaiserstr. 12 , D-76 128 Karlsruhe Tel.: +49 (721) 608 - 2441 / 4011 39
AbkürzungsverzeichnisARP: Adress Resolution ProtocolRARP: Reverse Adress Resolution ProtocolIP: Internet ProtocolGGP: Gateway-to-Gateway ProtocolEGP: Exterior Gateway ProtocolRSVP: Resource Reservation ProtocolICMP: Internet Control Message ProtocolIGMP: Internet Gateway Multicasting ProtocolOSFP: Open Shortest Path First ProtocolTCP: Transmission Control ProtocolUDP: User Datagram Protocol
COM: Component Object ModelDCOM: Distributed COMOPC: OLE for Process ControlOLE: Object Linking and EmbeddingCORBA: Common Request Broker ArchitectureSIS: Service Information SystemSPS: Speicherprogrammierbare SteuerungPLC: Programmable Logic ControlAT: Automatisierungstechnik
HTTP: Hypertext Transfer ProtocolXML: Extensible Markup LanguageSOAP: Simple Object Access ProtocolSGML: Standard Generalized Markup Language
CSMA/CD: Carrier-Sense Multiple-Access/Collision-Detection
WSDL: Web Service Description LanguageWSML: Web Service Meta LanguageASP: Active Server PagesISAPI: Internet Server APIAPI: Application Programming Interface







