einbindung von labormodellen mit industriepraktischen ...€¦ · einbindung von labormodellen mit...
TRANSCRIPT
Einbindung von Labormodellen mit industriepraktischen Fragestellungen
in der Hochschullehre
1
Tobias Loose, Thomas Pospiech
1. Einleitung • Industriepraxis & Hochschullehre
2. Nachstellung industriepraktischer Anwendungen • Regalbediengerät, Abfüllanlagen, Kran, … • Modellbildung und Versuchsanlagen
3. Zusammenfassung
Inhalt
2
1. Einleitung • Industriepraxis & Hochschullehre
2. Nachstellung industriepraktischer Anwendungen • Regalbediengerät, Abfüllanlagen, Kran, … • Modellbildung und Versuchsanlagen
3. Zusammenfassung
Inhalt
3
1. Einleitung: Motivation
4
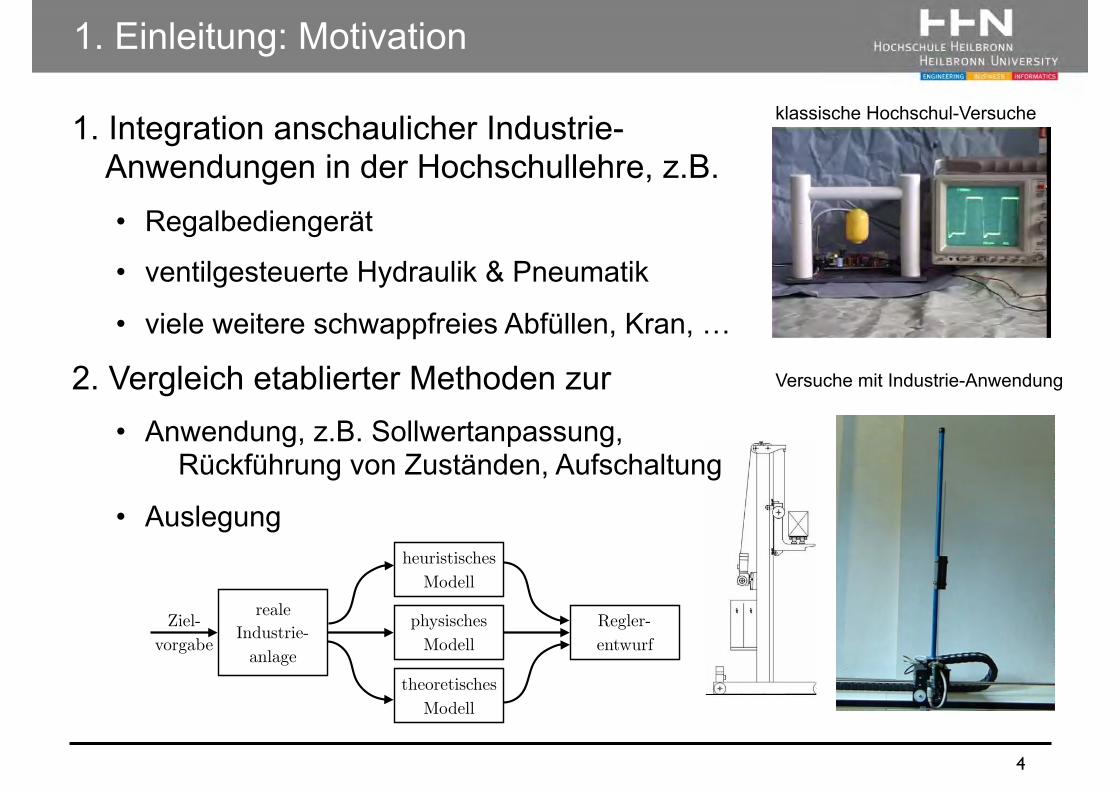
1. Integration anschaulicher Industrie-Anwendungen in der Hochschullehre, z.B. • Regalbediengerät
• ventilgesteuerte Hydraulik & Pneumatik
• viele weitere schwappfreies Abfüllen, Kran, …
klassische Hochschul-Versuche
Versuche mit Industrie-AnwendungHochschule KarlsruheTechnik und Wirtschaft UNIVERSITY OF APPLIED SCIENCES
Hochschule Karlsruhe – Technik und Wirtschaft7
Einleitung: Regelungstechnik
Regal
yx
zSchiene
2. Vergleich etablierter Methoden zur • Anwendung, z.B. Sollwertanpassung,
Rückführung von Zuständen, Aufschaltung
• Auslegung
Einbindung von Labormodellen mit industriepraktischen
Fragestellungen in der Hochschullehre
Tobias Loose1, Thomas Pospiech1
1Hochschule Heilbronn, Max-Planck-Straße 39, 74081 [email protected], [email protected]
Dieser Beitrag zeigt eine Reihe von industriepraktischen Anwendungen, wie sie in einer praxisorientiertenHochschullehre als Labormodelle eingebunden werden können. Hierbei werden sowohl kleine, physischeModelle als auch Simulationsmodelle exemplarisch mit industriepraktischen Fragestellungen gezeigt, z. B.Schwingungsdämpfung von Regalbediengeräten, schwappfreies Positionieren von Flüssigkeiten bei Ab-füllanlagen. Die Anwendung unterschiedlicher Methoden der Regelungstechnik werden ebenso gezeigt,wie z. B. Zustandsregelung, Entwürfe von Reglern mit klassischen Methoden wie die Auslegung mit demBode-Diagramm, Sollwertanpassung. Ein Vergleich der Methoden aus den unterschiedlichen Anwendun-gen lässt sich damit ebenso gut demonstrieren.
1 Einleitung
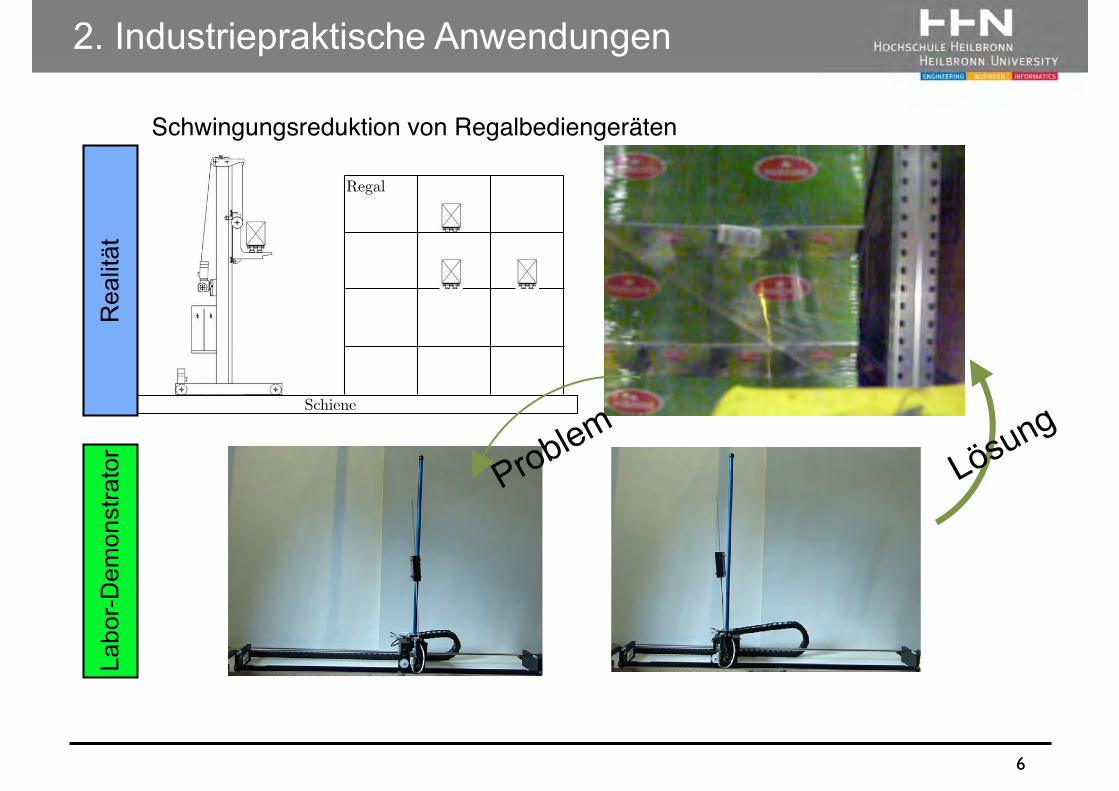
Anspruchsvolle mathematisch-technische Fachgebie-te wie Regelungstechnik begegnen Studierende aberauch erfahrene Ingenieure mit einem gewissen Re-spekt. Durch die Verknüpfung vieler Disziplinen zueiner funktionierenden Anlage wird die Regelungs-technik daher auch gerne als Königsdisziplin gese-hen, siehe auch [2, 10, 11]. Um Studierenden darinden Weg zu ebnen, eignen sich physische Modelle,um theoretische Erkenntnisse in der Praxis anzuwen-den. In diesem Beitrag sind eine Reihe industrieprak-tischer Fragestellungen und Fallbeispiele gezeigt, diemit kleinen physischen Modellen nachgebildet wer-den, z.B. Schwingungsreduzierung von Regalbedien-geräten, schwappfreies Positionieren von Flüssigkei-ten. Dabei werden theoretische Modellbildungen mitphysischen Modellen verknüpft inkl. dem darauf auf-bauenden Reglerentwurf. Es werden also industrie-praktische Anlagen als Labormodelle nachgebaut.
2 Varianten der Modellbildung
Die theoretische Modellbildung ist essentiell, um einVerständnis für die Realität aufzubauen. Daher ist inder klassischen Hochschullehre die theoretische Mo-dellbildung ein fester Bestandteil, um damit verschie-dene Entwurfsverfahren von Reglern zu behandeln.
In Lehrbüchern ist die theoretische Modellbildungnaturgemäß die einzige Möglichkeit, um die Rege-lungstechnik zu beschreiben, siehe Abbildung 1 un-ten und [2, 10, 11]. Damit können und werden in der
heuristisches Modell
physisches Modell
theoretisches Modell
Regler-entwurf
Ziel-vorgabe
reale Industrie-
anlage
Abbildung 1: Modellbildung für den Entwurf von Reglern
Industriepraxis Anlagen regelungstechnisch ausgelegtund in Betrieb genommen. Bei „einfachen Standard-“Industrieanlagen hat sich teilweise ein heuristisch-pragmatischer Reglerentwurf vor Ort an der Anla-ge etabliert, z. B. in Anlehnung an Verfahren nachZiegler-Nichols, siehe [10]. Dem liegt aber ein heuri-stisches Modellverständnis zu Grunde, basierend auftheoretischen Erkenntnissen, siehe Abbildung 1 oben.
Aufgrund der teilweisen abstrakt-komplexen mathe-matischen Beschreibung bei der theoretischen Mo-dellbildung kann mitunter die praxisnahe Anschauungverloren gehen. Um dem entgegen zu wirken, lassensich in der Hochschullehre physische Modelle einbin-den, siehe Abbildung 1 Mitte und z. B. [12]. In die-sem Beitrag werden physische Modelle mit Anwen-dungsbezug zur Industriepraxis als weitere Ergänzung
1. Einleitung • Industriepraxis & Hochschullehre
2. Nachstellung industriepraktischer Anwendungen • Regalbediengerät, Abfüllanlagen, Kran, … • Modellbildung und Versuchsanlagen
3. Zusammenfassung
Inhalt
5
2. Industriepraktische Anwendungen
6
Hochschule KarlsruheTechnik und Wirtschaft UNIVERSITY OF APPLIED SCIENCES
Hochschule Karlsruhe – Technik und Wirtschaft7
Einleitung: Regelungstechnik
Regal
yx
zSchiene
Schwingungsreduktion von RegalbediengerätenLa
bor-
Dem
onst
rato
r Lösung
Rea
lität
Problem
2. Industriepraktische Anwendungen
7
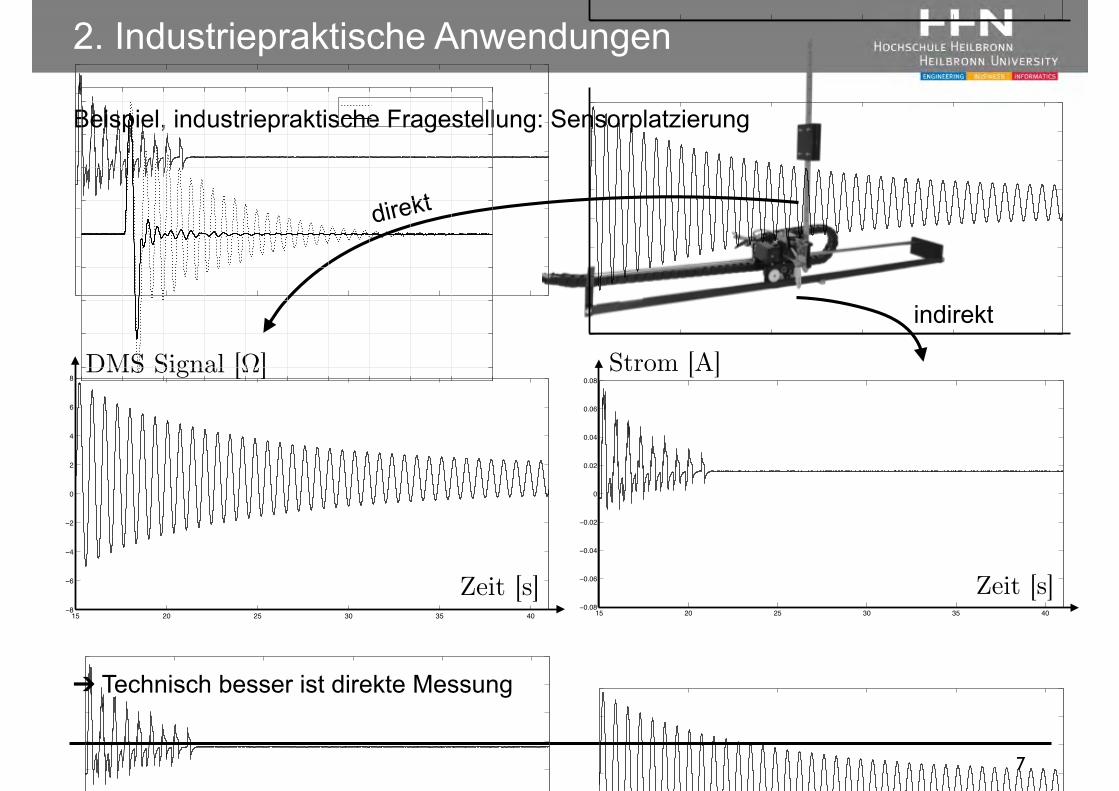
Beispiel, industriepraktische Fragestellung: Sensorplatzierung
Einbindung von Labormodellen mit industriepraktischen Fragestellungen in der Hochschullehre
nation von beiden als Stellgrößen-Aufschaltungbei der Positionsregelung, siehe [5, 9, 10],
• Rückführung von Zuständen, z. B. die Rückfüh-rung der Beschleunigung, siehe [9],
• Zustandsregelung, siehe [2, 5].
Beispielhaft ist mit einem Labormodell das Ergebniszur schwappfreien Positionierung in Abbildung 11 ge-zeigt. Dabei konnte die Auslenkung der Flüssigkeitdeutlich reduziert werden, siehe [9].
0 1 2 3 4 5 6 7 8 9 10
-20
-15
-10
-5
0
5
10
15
20
Abbildung 11: Ergebnisse mit einem Input Schaper [9]
Im o. g. regelungstechnischen Ziel der Anlagen wur-de bereits die einfache Realisierung erwähnt. Da-mit verbunden ist eine typische Fragestellungen ausder Industriepraxis mit möglichst kostengünstigenAusrüstungen eine ausreichende Regelgüte zu erzie-len. Gerne wird dabei das Weglassen von Senso-ren diskutiert, z. B. das Weglassen von Sensoren, diebeim Regalbediengerät die Mastschwingungen mes-sen, wie Beschleunigungssensoren oder Dehnungs-messstreifen. Natürlich gibt es auch hier regelungs-technische Lösungen, z. B. Messwertschätzung durchBeobachter oder modellbasierte Messwert-Schätzung,siehe [2, 9, 10]. Allerdings müssen hierbei Ungenau-igkeiten, Komplexität oder teilweise sicherheitskriti-sche Aspekte in Kauf genommen bzw. berücksichtigtwerden. Daher wird in der Industriepraxis immer wie-der gerne über alternative Messwerterfassung mit be-reits vorhandenen Sensoren diskutiert. Ein Beispieldafür ist mit der Strommessung des ElektromotorsRückschlüsse auf das Anlagenverhalten zu ziehen. ImFalle des Regalbediengerätes ist das also durch denStrom des Fahrwerkmotors die Mastschwingungen zubestimmen. Allerdings ist das auch in realen Industrie-anlagen oftmals schwierig, weil durch Reibungsein-flüsse die Messung zu ungenau wird. Das kann an-
hand eines Labormodells gut gezeigt werden. In Ab-bildung 12 oben ist das Schwingungsverhalten miteinem Dehnungsmessstreifen (DMS) aufgenommenund unten die gleiche Schwingung durch den Motor-strom. Es ist deutlich zu erkennen, dass die Messwer-te für regelungstechnische Aufgaben kaum zu gebrau-chen sind. Es lassen sich allenfalls Anlagenparame-ter wie die Eigenfrequenz oder mit Abstrichen auchder Dämpfungsgrad ablesen. In diesem Beispiel ist dieReibung im Getriebe zu groß, um verlässliche Ergeb-nisse zu erhalten.
15 20 25 30 35 40−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
15 20 25 30 35 40−8
−6
−4
−2
0
2
4
6
8
Zeit [s]
Strom [A]
Zeit [s]
DMS Signal [Ω]
15 20 25 30 35 40−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
15 20 25 30 35 40−8
−6
−4
−2
0
2
4
6
8
Zeit [s]
Strom [A]
Zeit [s]
DMS Signal [Ω]Abbildung 12: Sensormesswerte
Mit den hier dargestellten Industrieanwendungen las-sen sich somit sehr anschaulich die Praxisbezüge inder Regelungstechnik im Rahmen der Hochschulleh-re zeigen. Darüber hinaus lassen sich wichtige Er-kenntnisse zur Bewertung von Lösungen bei Indu-strieanlagen schlussfolgern, wie z. B. die Gewinnungvon Informationen durch die Strommessung oder diespezifischen Vor- und Nachteile von Zustandsregelun-gen bei Industrieanwendungen gegenüber klassischenPID-Reglern, siehe auch [5, 7, 15].
6 Zusammenfassung
In diesem Beitrag ist ein didaktisches Konzept als Er-gänzung für die Hochschullehre beschrieben, bei demregelungstechnische Industrieanwendungen als physi-
direkt
Einbindung von Labormodellen mit industriepraktischen Fragestellungen in der Hochschullehre
nation von beiden als Stellgrößen-Aufschaltungbei der Positionsregelung, siehe [5, 9, 10],
• Rückführung von Zuständen, z. B. die Rückfüh-rung der Beschleunigung, siehe [9],
• Zustandsregelung, siehe [2, 5].
Beispielhaft ist mit einem Labormodell das Ergebniszur schwappfreien Positionierung in Abbildung 11 ge-zeigt. Dabei konnte die Auslenkung der Flüssigkeitdeutlich reduziert werden, siehe [9].
0 1 2 3 4 5 6 7 8 9 10
-20
-15
-10
-5
0
5
10
15
20
Abbildung 11: Ergebnisse mit einem Input Schaper [9]
Im o. g. regelungstechnischen Ziel der Anlagen wur-de bereits die einfache Realisierung erwähnt. Da-mit verbunden ist eine typische Fragestellungen ausder Industriepraxis mit möglichst kostengünstigenAusrüstungen eine ausreichende Regelgüte zu erzie-len. Gerne wird dabei das Weglassen von Senso-ren diskutiert, z. B. das Weglassen von Sensoren, diebeim Regalbediengerät die Mastschwingungen mes-sen, wie Beschleunigungssensoren oder Dehnungs-messstreifen. Natürlich gibt es auch hier regelungs-technische Lösungen, z. B. Messwertschätzung durchBeobachter oder modellbasierte Messwert-Schätzung,siehe [2, 9, 10]. Allerdings müssen hierbei Ungenau-igkeiten, Komplexität oder teilweise sicherheitskriti-sche Aspekte in Kauf genommen bzw. berücksichtigtwerden. Daher wird in der Industriepraxis immer wie-der gerne über alternative Messwerterfassung mit be-reits vorhandenen Sensoren diskutiert. Ein Beispieldafür ist mit der Strommessung des ElektromotorsRückschlüsse auf das Anlagenverhalten zu ziehen. ImFalle des Regalbediengerätes ist das also durch denStrom des Fahrwerkmotors die Mastschwingungen zubestimmen. Allerdings ist das auch in realen Industrie-anlagen oftmals schwierig, weil durch Reibungsein-flüsse die Messung zu ungenau wird. Das kann an-
hand eines Labormodells gut gezeigt werden. In Ab-bildung 12 oben ist das Schwingungsverhalten miteinem Dehnungsmessstreifen (DMS) aufgenommenund unten die gleiche Schwingung durch den Motor-strom. Es ist deutlich zu erkennen, dass die Messwer-te für regelungstechnische Aufgaben kaum zu gebrau-chen sind. Es lassen sich allenfalls Anlagenparame-ter wie die Eigenfrequenz oder mit Abstrichen auchder Dämpfungsgrad ablesen. In diesem Beispiel ist dieReibung im Getriebe zu groß, um verlässliche Ergeb-nisse zu erhalten.
15 20 25 30 35 40−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
15 20 25 30 35 40−8
−6
−4
−2
0
2
4
6
8
Zeit [s]
Strom [A]
Zeit [s]
DMS Signal [Ω]
15 20 25 30 35 40−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
15 20 25 30 35 40−8
−6
−4
−2
0
2
4
6
8
Zeit [s]
Strom [A]
Zeit [s]
DMS Signal [Ω]Abbildung 12: Sensormesswerte
Mit den hier dargestellten Industrieanwendungen las-sen sich somit sehr anschaulich die Praxisbezüge inder Regelungstechnik im Rahmen der Hochschulleh-re zeigen. Darüber hinaus lassen sich wichtige Er-kenntnisse zur Bewertung von Lösungen bei Indu-strieanlagen schlussfolgern, wie z. B. die Gewinnungvon Informationen durch die Strommessung oder diespezifischen Vor- und Nachteile von Zustandsregelun-gen bei Industrieanwendungen gegenüber klassischenPID-Reglern, siehe auch [5, 7, 15].
6 Zusammenfassung
In diesem Beitrag ist ein didaktisches Konzept als Er-gänzung für die Hochschullehre beschrieben, bei demregelungstechnische Industrieanwendungen als physi-
indirekt
➔ Technisch besser ist direkte Messung
2. Industriepraktische Anwendungen
8
weiterführenden Arbeiten mit wenig Aufwand in reale Anlagen in der Pra-xis zu implementieren, z.B. als online Beobachter-Modell in existierendeMaschinensteuerungen.
Beim RBG ist i.W. lediglich die Position des Fahrwerks xF und die Aus-lenkung am Lastaufnahmemittel xL von Interesse. Daher wird ein Modellvorgeschlagen, das nur die kartesische raumfeste xF und lokale xL Koordi-nate berücksichtigt, siehe Bild 4.
Bild 4: Vereinfachtes Zweimassenmodell eines RBG
Der ohnehin kleine Auslenkungswinkel Ï wird nicht weiter berücksichtigt.Die Masse mL beinhaltet sowohl die Nutzlast als auch eine anteilige Massedes Mastes. Das Fahrwerk mit der Masse mF ist mit der Last mL übereine Feder c und einem Dämpfer d verbunden, siehe auch KräftefreischnittBild 5.
Bild 5: Kräftefreischnitt
Darin sind die Kräfte
• der Massenträgheit des Fahrwerks FF m = mF · xF ,
Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015 7
Realität Modell
Die Zustandsgleichungen mit der Zustandsdi�erential- und Ausgangsglei-chung
x = A · x + B · uy = CT · x (5)
werden mit dem Zustandsvektor x = (xF , xF , xL, xL)T bzw. dessen Ablei-tung x = (xF , xF , xL, xL)T, der Dynamik- bzw. Systemmatrix
A =
Q
ccca
0 1 0 00 ≠ –
mF
cmF
dmF
0 0 0 10 –
mL
1≠ c
mF≠ c
mL
2 1≠ d
mF≠ d
mL
2
R
dddb, (6)
der Eingangsmatrix B =1
0, —mF
, 0, ≠ —mF
2T, der Ausgangsmatrix CT =
(1, 0, 1, 0) sowie der Eingangsgröße u = ue und der Ausgangsgröße y unterBerücksichtigung der Gleichungen (1) und (2) beschrieben. Die Ausgangs-größe y = xF + xL beschreibt also die Position des Lastaufnahmemittelsim Raum zur Erreichung eines bestimmten Regalfaches.
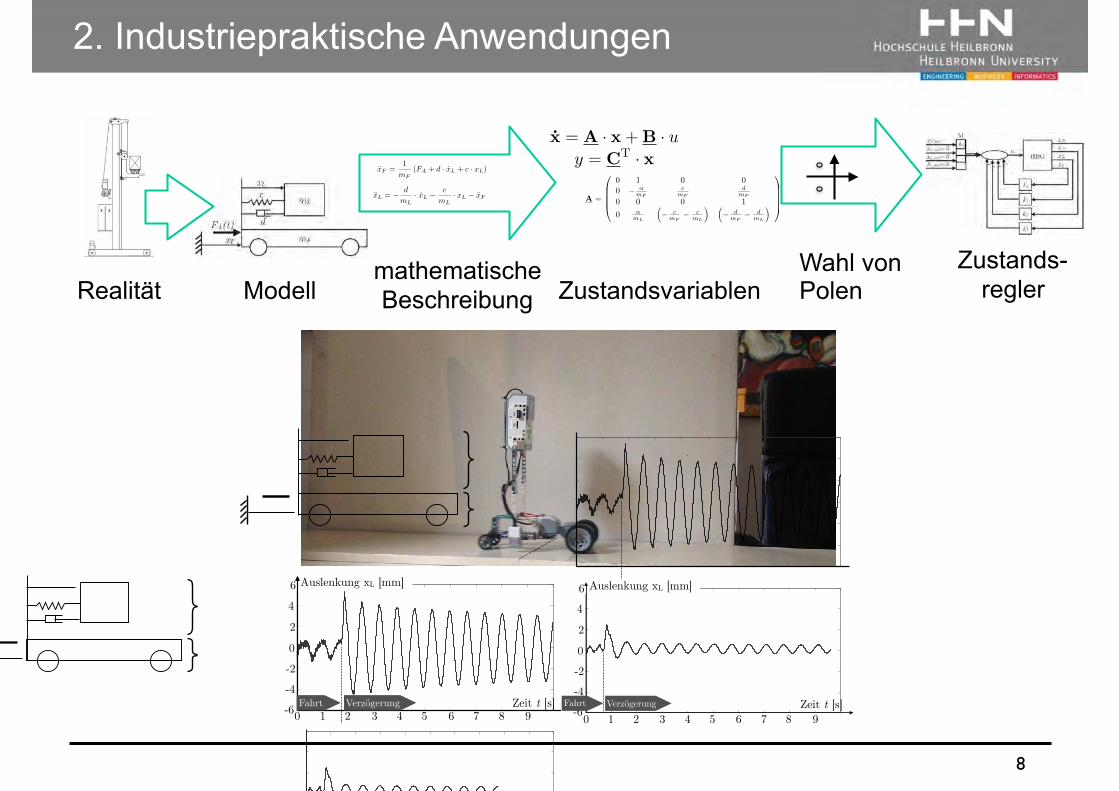
Der Reglerentwurf kann mit einer Polvorgabe erfolgen, hierbei wird dieSystemeigenschaft vorgegeben. Für das Labormodell können die Pole mitbeispielsweise P = (≠1, 8 + j1, 9, ≠1, 8 ≠ j1, 9, ≠40, ≠60) vorgegeben wer-den. Zu bemerken ist, dass beim Labormodell die Pole viel weiter linksder imaginären Achse liegen dürfen als bei realen Anlagen, weil die me-chanische Belastbarkeit beim Labormodell im Größenverhältnis viel höherist. Gesucht wird nun ein Zustandsregler K, der das Gesamtsystem soeinstellt, dass das Eigenwertproblem [⁄iI ≠ (A ≠ B K)] xi = 0 mit denvorgegebenen Polen als Eigenwerte löst. Hierzu existieren Algorithmenund mathematische Methoden, die den Zustandsregler berechnen, z.B. derMatlab-Befehl “place(A,B,P)“ und auch [11]. Zur Erreichung der statio-nären Genauigkeit muss noch ein Vorfilter M eingeführt werden, der indiesem Beispiel identisch mit K ist, siehe Bild 11.
Die Vorteile dieser Methode sind hervorragende Dynamik und Eigenschaftdes geregelten Gesamtsystems, siehe Bild 12. Zu erkennen ist die gerin-ge maximale Auslenkung des Mastes xL sowie die schnell abklingendenSchwingungen. Die im Stillstand noch zu erkennenden Schwingungen mit
Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015 15
Die Zustandsgleichungen mit der Zustandsdi�erential- und Ausgangsglei-chung
x = A · x + B · uy = CT · x (5)
werden mit dem Zustandsvektor x = (xF , xF , xL, xL)T bzw. dessen Ablei-tung x = (xF , xF , xL, xL)T, der Dynamik- bzw. Systemmatrix
A =
Q
ccca
0 1 0 00 ≠ –
mF
cmF
dmF
0 0 0 10 –
mL
1≠ c
mF≠ c
mL
2 1≠ d
mF≠ d
mL
2
R
dddb, (6)
der Eingangsmatrix B =1
0, —mF
, 0, ≠ —mF
2T, der Ausgangsmatrix CT =
(1, 0, 1, 0) sowie der Eingangsgröße u = ue und der Ausgangsgröße y unterBerücksichtigung der Gleichungen (1) und (2) beschrieben. Die Ausgangs-größe y = xF + xL beschreibt also die Position des Lastaufnahmemittelsim Raum zur Erreichung eines bestimmten Regalfaches.
Der Reglerentwurf kann mit einer Polvorgabe erfolgen, hierbei wird dieSystemeigenschaft vorgegeben. Für das Labormodell können die Pole mitbeispielsweise P = (≠1, 8 + j1, 9, ≠1, 8 ≠ j1, 9, ≠40, ≠60) vorgegeben wer-den. Zu bemerken ist, dass beim Labormodell die Pole viel weiter linksder imaginären Achse liegen dürfen als bei realen Anlagen, weil die me-chanische Belastbarkeit beim Labormodell im Größenverhältnis viel höherist. Gesucht wird nun ein Zustandsregler K, der das Gesamtsystem soeinstellt, dass das Eigenwertproblem [⁄iI ≠ (A ≠ B K)] xi = 0 mit denvorgegebenen Polen als Eigenwerte löst. Hierzu existieren Algorithmenund mathematische Methoden, die den Zustandsregler berechnen, z.B. derMatlab-Befehl “place(A,B,P)“ und auch [11]. Zur Erreichung der statio-nären Genauigkeit muss noch ein Vorfilter M eingeführt werden, der indiesem Beispiel identisch mit K ist, siehe Bild 11.
Die Vorteile dieser Methode sind hervorragende Dynamik und Eigenschaftdes geregelten Gesamtsystems, siehe Bild 12. Zu erkennen ist die gerin-ge maximale Auslenkung des Mastes xL sowie die schnell abklingendenSchwingungen. Die im Stillstand noch zu erkennenden Schwingungen mit
Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015 15
• der Massenträgheit der Last FLm = mL · (xF + xL),
• der Feder Fc = c · xL und
• des Dämpfers Fd = d · xL
enthalten. Daraus ergeben sich die Bewegungs-Di�erentialgleichungen
xF = 1mF
(FA + d · xL + c · xL) (1)
xL = ≠ d
mL· xL ≠ c
mL· xL ≠ xF , (2)
siehe auch Bild 6. Darin ist zu erkennen, dass die Antriebskraft des Motorsdie zwei Ausgangsgrößen Position des Fahrwerks xF und die dazu relativePosition des Lastaufnahmemittels xL beeinflusst.
Bild 6: Blockschaltbild der Bewegungs-Di�erentialgleichungen
Die Massen des Fahrzeugs mF und der Last mL (jeweils anteilig mit derMastmasse) als Modell-Parameter sind i.d.R. aus den Datenblättern derHersteller zu entnehmen. Die Federsteifigkeit c kann über die für RBGtypischen Eigenfrequenzen von f0 = 0, 5 . . . 2 Hz und mit der Eigenfre-quenz von ungedämpften Feder-Masse-Systemen mit f0 = 1
2fi
cm bestimmt
werden, also mit c = mL (f02fi)2. Aufgrund des niedrigen Dämpfungsgra-des D = 0, 05 . . . 2 kann der Einfluss auf die tatsächliche Eigenfrequenzfe = f0 ·
Ô1 ≠ D2 vernachlässigt werden, d.h. fe ¥ f0. Mit dem für ein RBG
typischen Dämpfungsgrad mit D = 0, 05 . . . 2 lässt sich der modellierte
8 Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015
mathematischeBeschreibung Zustandsvariablen
hierzu [11, 15, 17, 19]. Die Antriebskraft FA hängt über den Getriebefak-tor i als Hebelarm mit dem Drehmoment M = FA · i zusammen, ebensoauch die Motor-Winkelgeschwindigkeit Ê mit der Fahrzeug-GeschwindigkeitxF = Ê · i. Bei Vernachlässigung der Induktivität L bzw. bei konstantemDrehmoment M lässt sich das Motorverhalten durch
FA = ≠– · xF + — · ue (4)
vereinfachen. Die Faktoren – und — sind Abkürzungen und beinhalten denGetriebefaktor i und die Parameter k, �, R aus Gleichung (3).
Für den Entwurf des Zustandsreglers werden hier vier Zustandsvariablendefiniert, um das System (bzw. das Modell) vollständig zu erfassen, sieheTabelle 2. Die Struktur dieses Reglers sieht vor, dass die Zustände miteinem Zustandsregler K gewichtet und zurück geführt werden, siehe Bild 11.
Tabelle 2: Zustandsvariablen für den Entwurf des Reglers
Größe bzw. Variable FormelzeichenPosition Fahrwerk xF
Geschwindigkeit Fahrwerk xF
Position Hubwerk xL
Geschwindigkeit Hubwerk xL
Bild 11: Blockschaltbild der Zustandsregelung des Labormodells
14 Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015
Wahl vonPolen
Zustands-regler
Projektierung mechatronischer Anlagen in der Hochschullehre am Beispiel von Labormodellen
mFFA(t)
mL
d
cxL
xF
Vereinfachtes Zweimassenmodell
Fahrwerk
Last
Abbildung 7: Vereinfachtes Modell eines Regalbedi-engerätes, siehe [8]
in Abbildung 6 und Ergebnis in Abbildung 8 untensowie Einzelheiten zur Auslegung in [8]. Auf Ba-sis eines Modells lassen sich auch weitere Reglerent-wurfsverfahren nutzen, wie z. B. im Zeit- oder Fre-quenzbereich, siehe [6, 11, 14].
Eine weitere Vorgehensweise besteht in der Vorab-auswahl eines möglichen Regelstreckenmodells, umstrukturell das Verhalten nachzubilden. Die Para-meter werden danach aus Messwerten erfasst.Beispielsweise lassen sich aus den Messwerten desungedämpften Mastes eines RBG der DämpfungsgradD, die Eigenkreisfrequenz w0 = 2 ·p · f0 und der Ver-stärkungsfaktor K ermitteln, siehe Abbildung 8 oben,und in der Übertragungsfunktion
FS =K ·w2
0s2 +D ·w0 · s+w2
0(6)
abbilden. Mit diesem Ansatz kann wiederum mit un-terschiedlichen Entwurfsverfahren ein Regler auslegtwerden, wie oben beschrieben. Weitere Entwurfsver-fahren sind natürlich ebenso einsetzbar, z. B. nachZiegler-Nichols oder daraus abgeleitete rein “heuris-tische” Entwürfe vor Ort an den Anlagen.
Diese Gegenüberstellung und Auslegung durch ver-schiedene Methoden lassen sich sehr schön durch dieoben beschriebenen Labormodelle veranschaulichen.Eine Schwierigkeit verlässliche Modelle zu ermit-teln besteht allerdings darin, dass die Realität nichtimmer durch lineare Gleichungen erfassbar ist oderauch einzelne Parameter nicht immer bekannt sind,wie z. B. Hysterese-Effekte, Reibungskoeffizienten inAbhängigkeit der Temperatur, Spiel, Fertigungstoler-anzen. Dazu passt ein berühmtes Zitat von Albert Ein-stein, auch wenn es aus einem anderen Zusammen-hang stammt: “Insofern sich die Sätze der Mathematikauf die Wirklichkeit beziehen, sind sie nicht sicher, undinsofern sie sicher sind, beziehen sie sich nicht aufdie Wirklichkeit.”, siehe S. 133 in [13]. Diese “Un-sicherheit” kann durch LEGO R� MINDSTORMS R�
Labormodelle gut demonstriert werden. Bei der Mes-
Reine Positionsregelung Fahrzeug
12 13 14 15 16 17 18 19 20 21 22−6
−4
−2
0
2
4
6x 10
−3
Zeit t [s]0 1 2 3 4 5 6 7 8 9
0-2-4-6
24
Auslenkung xL [mm]
Verzögerung
6
Fahrt
Zustandsregelung
14 15 16 17 18 19 20 21 22 23 24−6
−4
−2
0
2
4
6x 10−3
Zeit t [s]0
Auslenkung xL [mm]
1 2 3 4 5 6 7 8 9
0-2-4-6
246
14 15 16 17 18 19 20 21 22 23 24−6
−4
−2
0
2
4
6x 10−3
Fahrt Verzögerung
Abbildung 8: Messwerte eines RBG-Labormodells, ohneDämpfung (oben) und mit Zustandsregelung (unten)
sung eines Einschwingvorgangs auf die Straßenlageeines fahrerlosen Transportsystems sind nichtlineareund stochastische Einflüsse gut erkennbar, siehe Ab-bildungen 2 Mitte und “Lego-Messwerte“ in 9. Unter
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
Zeit [s]
Straßenlage
1. Zeitabschnitt
2. Zeitabschnitt
3. Zeitabschnitt
4. Zeitabschnitt
Sollwert Lego-Messwerte P-T1 mit Totzeit P-T2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
Abbildung 9: Messwerte zur Modellbildung, siehe [10]
gleichen Bedingungen zeigen die Messwerte teilweiseunterschiedliche Ergebnisse. Gründe hierfür sindu. a. verhältnismäßig hohe Abtastzeiten des Micro-controllers, Lagerspiel und Toleranzen, Nichtlineari-täten in der Mechanik (hier z. B. durch Gummireifen)sowie Hysterese-Effekte durch die Reibung. Als La-borarbeit werden damit die Schwächen jeder Modell-bildung gut demonstriert. Natürlich lässt sich durchrein theoretische Modellbildung anschließend ein Re-gler entwerfen (linke Spalte in Abbildung 6), was aberin diesem Beispiel sehr aufwändig ist und die Reali-tät dennoch nicht erfasst werden kann, insbesonderedurch stochastische Einflüsse der Spiele. Eine weitere
Projektierung mechatronischer Anlagen in der Hochschullehre am Beispiel von Labormodellen
mFFA(t)
mL
d
cxL
xF
Vereinfachtes Zweimassenmodell
Fahrwerk
Last
Abbildung 7: Vereinfachtes Modell eines Regalbedi-engerätes, siehe [8]
in Abbildung 6 und Ergebnis in Abbildung 8 untensowie Einzelheiten zur Auslegung in [8]. Auf Ba-sis eines Modells lassen sich auch weitere Reglerent-wurfsverfahren nutzen, wie z. B. im Zeit- oder Fre-quenzbereich, siehe [6, 11, 14].
Eine weitere Vorgehensweise besteht in der Vorab-auswahl eines möglichen Regelstreckenmodells, umstrukturell das Verhalten nachzubilden. Die Para-meter werden danach aus Messwerten erfasst.Beispielsweise lassen sich aus den Messwerten desungedämpften Mastes eines RBG der DämpfungsgradD, die Eigenkreisfrequenz w0 = 2 ·p · f0 und der Ver-stärkungsfaktor K ermitteln, siehe Abbildung 8 oben,und in der Übertragungsfunktion
FS =K ·w2
0s2 +D ·w0 · s+w2
0(6)
abbilden. Mit diesem Ansatz kann wiederum mit un-terschiedlichen Entwurfsverfahren ein Regler auslegtwerden, wie oben beschrieben. Weitere Entwurfsver-fahren sind natürlich ebenso einsetzbar, z. B. nachZiegler-Nichols oder daraus abgeleitete rein “heuris-tische” Entwürfe vor Ort an den Anlagen.
Diese Gegenüberstellung und Auslegung durch ver-schiedene Methoden lassen sich sehr schön durch dieoben beschriebenen Labormodelle veranschaulichen.Eine Schwierigkeit verlässliche Modelle zu ermit-teln besteht allerdings darin, dass die Realität nichtimmer durch lineare Gleichungen erfassbar ist oderauch einzelne Parameter nicht immer bekannt sind,wie z. B. Hysterese-Effekte, Reibungskoeffizienten inAbhängigkeit der Temperatur, Spiel, Fertigungstoler-anzen. Dazu passt ein berühmtes Zitat von Albert Ein-stein, auch wenn es aus einem anderen Zusammen-hang stammt: “Insofern sich die Sätze der Mathematikauf die Wirklichkeit beziehen, sind sie nicht sicher, undinsofern sie sicher sind, beziehen sie sich nicht aufdie Wirklichkeit.”, siehe S. 133 in [13]. Diese “Un-sicherheit” kann durch LEGO R� MINDSTORMS R�
Labormodelle gut demonstriert werden. Bei der Mes-
Reine Positionsregelung Fahrzeug
12 13 14 15 16 17 18 19 20 21 22−6
−4
−2
0
2
4
6x 10
−3
Zeit t [s]0 1 2 3 4 5 6 7 8 9
0-2-4-6
24
Auslenkung xL [mm]
Verzögerung
6
Fahrt
Zustandsregelung
14 15 16 17 18 19 20 21 22 23 24−6
−4
−2
0
2
4
6x 10−3
Zeit t [s]0
Auslenkung xL [mm]
1 2 3 4 5 6 7 8 9
0-2-4-6
246
14 15 16 17 18 19 20 21 22 23 24−6
−4
−2
0
2
4
6x 10−3
Fahrt Verzögerung
Abbildung 8: Messwerte eines RBG-Labormodells, ohneDämpfung (oben) und mit Zustandsregelung (unten)
sung eines Einschwingvorgangs auf die Straßenlageeines fahrerlosen Transportsystems sind nichtlineareund stochastische Einflüsse gut erkennbar, siehe Ab-bildungen 2 Mitte und “Lego-Messwerte“ in 9. Unter
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
Zeit [s]
Straßenlage
1. Zeitabschnitt
2. Zeitabschnitt
3. Zeitabschnitt
4. Zeitabschnitt
Sollwert Lego-Messwerte P-T1 mit Totzeit P-T2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
100 105 110 115 120
10
20
30
40
50
60
70
80
90
SollwertLegoPT1 mit TotzeitPT2
Abbildung 9: Messwerte zur Modellbildung, siehe [10]
gleichen Bedingungen zeigen die Messwerte teilweiseunterschiedliche Ergebnisse. Gründe hierfür sindu. a. verhältnismäßig hohe Abtastzeiten des Micro-controllers, Lagerspiel und Toleranzen, Nichtlineari-täten in der Mechanik (hier z. B. durch Gummireifen)sowie Hysterese-Effekte durch die Reibung. Als La-borarbeit werden damit die Schwächen jeder Modell-bildung gut demonstriert. Natürlich lässt sich durchrein theoretische Modellbildung anschließend ein Re-gler entwerfen (linke Spalte in Abbildung 6), was aberin diesem Beispiel sehr aufwändig ist und die Reali-tät dennoch nicht erfasst werden kann, insbesonderedurch stochastische Einflüsse der Spiele. Eine weitere
2. Industriepraktische Anwendungen
9
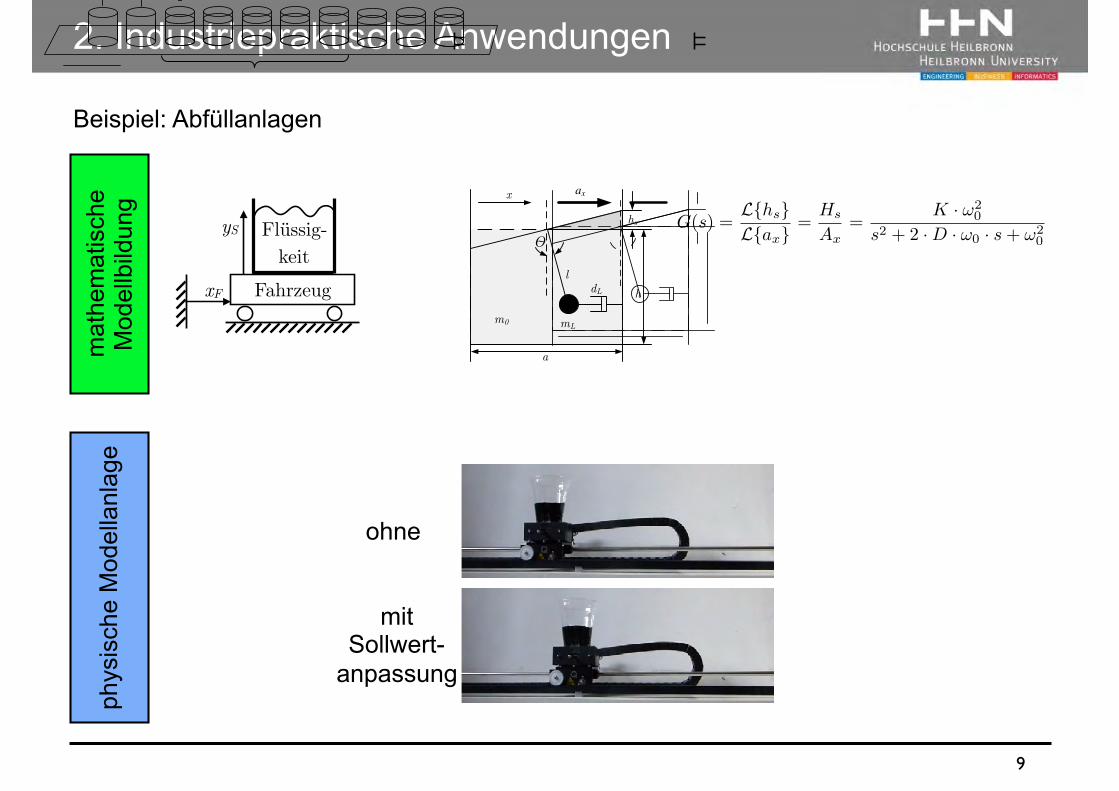
Beispiel: Abfüllanlagenm
athe
mat
isch
e M
odel
lbild
ung
Unmittelbar nach dem Stoppen des Transportbands muss die Flüssigkeitin Ruhe sein und darf keine Bewegungen mehr durchführen, da ansons-ten ein „Aufschwappen“ eintreten kann (Resonanz). Des Weiteren darfeine maximale Auslenkung der Flüssigkeit im Behälter, bei minimalerVerfahrzeit, nicht überschritten werden.
Das Verhalten von Flüssigkeiten in einem Behälter kann durch ein ge-dämpftes Pendelmodel angenähert werden, siehe [2, 14] und Bild 2.
dL
mL
hs
a
Ө
l
h
axx
m0
a Behälterdurchmesserax Behälterbeschleunigung dL Dämpfungsparameter (Viskosität)g Erdbeschleunigungh Füllhöhe der Flüssigkeiths Auslenkung der Flüssigkeit (Behälterwand)l Länge des virtuellen Pendels m0 „Ortsfeste“ Masse der Flüssigkeit mL Schwingender Masseanteil der FlüssigkeitӨ Winkel der Auslenkung der Flüssigkeit
Bild 2: Approximiertes Modell: Verhalten von Flüssigkeiten in einem Behälter
Die Flüssigkeiten sind mit folgenden Eigenschaften angenähert:
• Keine Viskositätsänderung durch Temperatur Ë, Druck p, Zeit t,
• konstante Dichte fl (inkompressible Flüssigkeit),
• keine Übertragung von Schubspannungen (Newton-Fluid).
Die Bewegungsdi�erentialgleichung lässt sich mit
◊ = ≠ d
mL· ◊ ≠ g
l· ◊ + 1
l· x (1)
für kleine Flüssigkeit-Auslenkungswinkel ◊ berechnen. Die Behälterbe-schleunigung ax (t) = x (t) steht mit der Flüssigkeitsauslenkung
hs = ≠ax
2 · ◊ (2)
in Zusammenhang. Hiermit lässt sich die Übertragungsfunktion
G(s) = L{hs}L{ax} = Hs
Ax= K · Ê
20
s2 + 2 · D · Ê0 · s + Ê20
(3)
4 Proc. 27. Workshop Computational Intelligence, Dortmund, 23.-24.11.2017
Unmittelbar nach dem Stoppen des Transportbands muss die Flüssigkeitin Ruhe sein und darf keine Bewegungen mehr durchführen, da ansons-ten ein „Aufschwappen“ eintreten kann (Resonanz). Des Weiteren darfeine maximale Auslenkung der Flüssigkeit im Behälter, bei minimalerVerfahrzeit, nicht überschritten werden.
Das Verhalten von Flüssigkeiten in einem Behälter kann durch ein ge-dämpftes Pendelmodel angenähert werden, siehe [2, 14] und Bild 2.
dL
mL
hs
a
Ө
l
h
axx
m0
a Behälterdurchmesserax Behälterbeschleunigung dL Dämpfungsparameter (Viskosität)g Erdbeschleunigungh Füllhöhe der Flüssigkeiths Auslenkung der Flüssigkeit (Behälterwand)l Länge des virtuellen Pendels m0 „Ortsfeste“ Masse der Flüssigkeit mL Schwingender Masseanteil der FlüssigkeitӨ Winkel der Auslenkung der Flüssigkeit
Bild 2: Approximiertes Modell: Verhalten von Flüssigkeiten in einem Behälter
Die Flüssigkeiten sind mit folgenden Eigenschaften angenähert:
• Keine Viskositätsänderung durch Temperatur Ë, Druck p, Zeit t,
• konstante Dichte fl (inkompressible Flüssigkeit),
• keine Übertragung von Schubspannungen (Newton-Fluid).
Die Bewegungsdi�erentialgleichung lässt sich mit
◊ = ≠ d
mL· ◊ ≠ g
l· ◊ + 1
l· x (1)
für kleine Flüssigkeit-Auslenkungswinkel ◊ berechnen. Die Behälterbe-schleunigung ax (t) = x (t) steht mit der Flüssigkeitsauslenkung
hs = ≠ax
2 · ◊ (2)
in Zusammenhang. Hiermit lässt sich die Übertragungsfunktion
G(s) = L{hs}L{ax} = Hs
Ax= K · Ê
20
s2 + 2 · D · Ê0 · s + Ê20
(3)
4 Proc. 27. Workshop Computational Intelligence, Dortmund, 23.-24.11.2017
phys
isch
e M
odel
lanl
age
ohne
mit Sollwert-
anpassung
Einbindung von Labormodellen mit industriepraktischen Fragestellungen in der Hochschullehre
VerschlusseinheitAbfüllung
kritischer BereichBewegungsrichtung
Verfahrweg
sicherer Bereichoffene Behälter mit Produkt
Abbildung 6: Prinzip von Abfüllanlagen [9]
Fahrzeug
Flüssig-keit
HebebühneMAG MB G
x y
g
Führungsschienen mit Zahnstangen
xF
yS
Abbildung 7: Prinzip eines physischen Labormodells fürdas schwappfreie (yS = konst.) Positionieren xF
4 Theoretische Modellbildung
Die in Kapitel 3 gezeigten Anwendungen lassen sichpragmatisch mit der Übertragungsfunktion
G(s) =K ·w2
0s2 +2 ·D ·w0 · s+w2
0(1)
und dem Verstärkungsfaktor K, dem DämpfungsgradD sowie der Eigenkreisfrequenz des ungedämpftenSystems w0 beschreiben. Die Parameteridentifikationkann nun durch
• physikalische Grundgesetze und Materialeigen-schaften (anhand Ersatzmodellen wie in Abbil-dung 8 und 9) oder
• Anregung des physischen Modells und anhandder Sensor-Messwerte (siehe z.B. Abbildung 12)
ermittelt werden. Beide Varianten eignen sich hervor-ragend als Vergleich für die Implementierung in einerLaborübung.
Darauf aufbauend lassen sich neben den physischenModellen auch Simulationsmodelle als Laborübungentwerfen, siehe beispielhaft Abbildung 10.
Abbildung 8: Vereinfachtes Modell eines Regalbediengerä-tes zur Positionierung des Fahrzeugs in xF bei gleichzeitigerSchwingungsdämpfung des Mastes in xL [5]
dL
mL
hs
a
Ө
l
h
axx
m0
a Behälterdurchmesserax Behälterbeschleunigung dL Dämpfungsparameter (Viskosität)g Erdbeschleunigungh Füllhöhe der Flüssigkeiths Auslenkung der Flüssigkeit (Behälterwand)l Länge des virtuellen Pendels m0 „Ortsfeste“ Masse der Flüssigkeit mL Schwingender Masseanteil der FlüssigkeitӨ Winkel der Auslenkung der Flüssigkeit
Abbildung 9: Modell einer schwappenden Flüssigkeit [9]
Abbildung 10: Blockschaltbild eines Regalbediengerä-tes [5]
5 Exemplarische Fragestellungen
und Lösungsansätze
Bei den in Kapitel 3 vorgestellten Industrieanwen-dungen handelt es sich jeweils um stabile, schwachgedämpfte Regelstrecken, die grundlegend durch einVerzögerungsglied 2. Ordnung beschrieben werdenkönnen, siehe Gleichung 1. Das regelungstechnischeZiel dieser Anlagen ist eine einfache Realisierungeiner Positionsregelung bei gleichzeitiger Schwin-gungsreduzierung der Anwendung. Lösungsansätzesind u. a.
• spezielle Eingangssignale wie Input-Shaper oderangepasste Rampenzeiten an die Eigenfrequenz,siehe [3, 4, 5, 9, 13, 16],
• klassischer PID-Regler, z. B. zunächst jeweilsals Eingrößenregelung der Positionierung bzw.Schwingungsreduzierung und dann die Kombi-
2. Industriepraktische Anwendungen
10
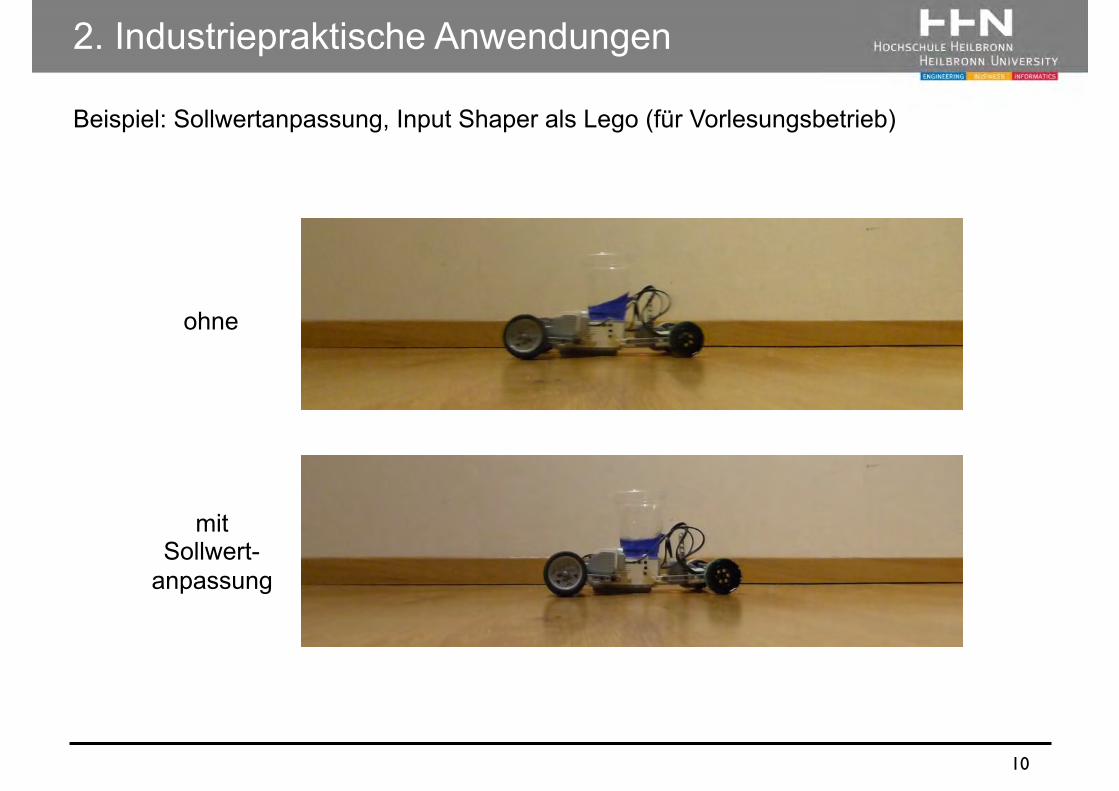
Beispiel: Sollwertanpassung, Input Shaper als Lego (für Vorlesungsbetrieb)
ohne
mit Sollwert-
anpassung
1. Einleitung • Industriepraxis & Hochschullehre
2. Nachstellung industriepraktischer Anwendungen • Regalbediengerät, Abfüllanlagen, Kran, … • Modellbildung und Versuchsanlagen
3. Zusammenfassung
Inhalt
11
12
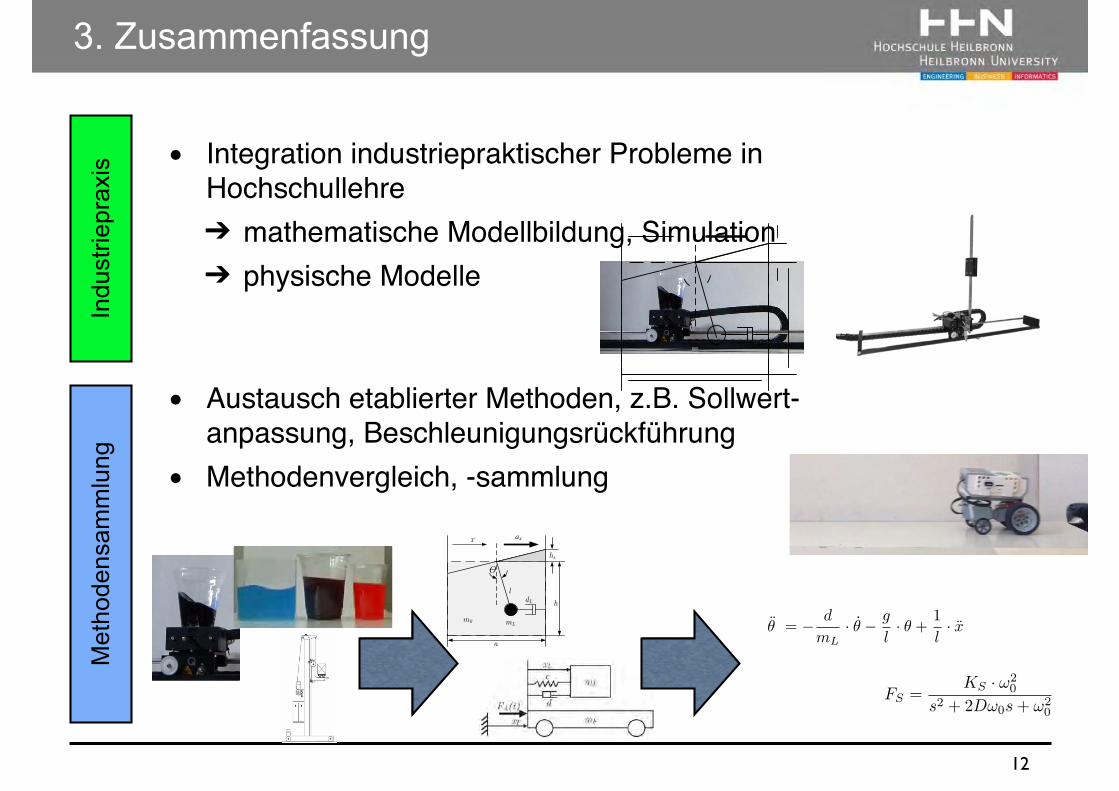
3. ZusammenfassungIn
dust
riepr
axis
Met
hode
nsam
mlu
ng
weiterführenden Arbeiten mit wenig Aufwand in reale Anlagen in der Pra-xis zu implementieren, z.B. als online Beobachter-Modell in existierendeMaschinensteuerungen.
Beim RBG ist i.W. lediglich die Position des Fahrwerks xF und die Aus-lenkung am Lastaufnahmemittel xL von Interesse. Daher wird ein Modellvorgeschlagen, das nur die kartesische raumfeste xF und lokale xL Koordi-nate berücksichtigt, siehe Bild 4.
Bild 4: Vereinfachtes Zweimassenmodell eines RBG
Der ohnehin kleine Auslenkungswinkel Ï wird nicht weiter berücksichtigt.Die Masse mL beinhaltet sowohl die Nutzlast als auch eine anteilige Massedes Mastes. Das Fahrwerk mit der Masse mF ist mit der Last mL übereine Feder c und einem Dämpfer d verbunden, siehe auch KräftefreischnittBild 5.
Bild 5: Kräftefreischnitt
Darin sind die Kräfte
• der Massenträgheit des Fahrwerks FF m = mF · xF ,
Proc. 25. Workshop Computational Intelligence, Dortmund, 26.-27.11.2015 7
Unmittelbar nach dem Stoppen des Transportbands muss die Flüssigkeitin Ruhe sein und darf keine Bewegungen mehr durchführen, da ansons-ten ein „Aufschwappen“ eintreten kann (Resonanz). Des Weiteren darfeine maximale Auslenkung der Flüssigkeit im Behälter, bei minimalerVerfahrzeit, nicht überschritten werden.
Das Verhalten von Flüssigkeiten in einem Behälter kann durch ein ge-dämpftes Pendelmodel angenähert werden, siehe [2, 14] und Bild 2.
dL
mL
hs
a
Ө
l
h
axx
m0
a Behälterdurchmesserax Behälterbeschleunigung dL Dämpfungsparameter (Viskosität)g Erdbeschleunigungh Füllhöhe der Flüssigkeiths Auslenkung der Flüssigkeit (Behälterwand)l Länge des virtuellen Pendels m0 „Ortsfeste“ Masse der Flüssigkeit mL Schwingender Masseanteil der FlüssigkeitӨ Winkel der Auslenkung der Flüssigkeit
Bild 2: Approximiertes Modell: Verhalten von Flüssigkeiten in einem Behälter
Die Flüssigkeiten sind mit folgenden Eigenschaften angenähert:
• Keine Viskositätsänderung durch Temperatur Ë, Druck p, Zeit t,
• konstante Dichte fl (inkompressible Flüssigkeit),
• keine Übertragung von Schubspannungen (Newton-Fluid).
Die Bewegungsdi�erentialgleichung lässt sich mit
◊ = ≠ d
mL· ◊ ≠ g
l· ◊ + 1
l· x (1)
für kleine Flüssigkeit-Auslenkungswinkel ◊ berechnen. Die Behälterbe-schleunigung ax (t) = x (t) steht mit der Flüssigkeitsauslenkung
hs = ≠ax
2 · ◊ (2)
in Zusammenhang. Hiermit lässt sich die Übertragungsfunktion
G(s) = L{hs}L{ax} = Hs
Ax= K · Ê
20
s2 + 2 · D · Ê0 · s + Ê20
(3)
4 Proc. 27. Workshop Computational Intelligence, Dortmund, 23.-24.11.2017
2. Industriepraktische Anwendungen
10
Ideen für Lehre: Eigenfrequenzen
Unmittelbar nach dem Stoppen des Transportbands muss die Flüssigkeitin Ruhe sein und darf keine Bewegungen mehr durchführen, da ansons-ten ein „Aufschwappen“ eintreten kann (Resonanz). Des Weiteren darfeine maximale Auslenkung der Flüssigkeit im Behälter, bei minimalerVerfahrzeit, nicht überschritten werden.
Das Verhalten von Flüssigkeiten in einem Behälter kann durch ein ge-dämpftes Pendelmodel angenähert werden, siehe [2, 14] und Bild 2.
dL
mL
hs
a
Ө
l
h
axx
m0
a Behälterdurchmesserax Behälterbeschleunigung dL Dämpfungsparameter (Viskosität)g Erdbeschleunigungh Füllhöhe der Flüssigkeiths Auslenkung der Flüssigkeit (Behälterwand)l Länge des virtuellen Pendels m0 „Ortsfeste“ Masse der Flüssigkeit mL Schwingender Masseanteil der FlüssigkeitӨ Winkel der Auslenkung der Flüssigkeit
Bild 2: Approximiertes Modell: Verhalten von Flüssigkeiten in einem Behälter
Die Flüssigkeiten sind mit folgenden Eigenschaften angenähert:
• Keine Viskositätsänderung durch Temperatur Ë, Druck p, Zeit t,
• konstante Dichte fl (inkompressible Flüssigkeit),
• keine Übertragung von Schubspannungen (Newton-Fluid).
Die Bewegungsdi�erentialgleichung lässt sich mit
◊ = ≠ d
mL· ◊ ≠ g
l· ◊ + 1
l· x (1)
für kleine Flüssigkeit-Auslenkungswinkel ◊ berechnen. Die Behälterbe-schleunigung ax (t) = x (t) steht mit der Flüssigkeitsauslenkung
hs = ≠ax
2 · ◊ (2)
in Zusammenhang. Hiermit lässt sich die Übertragungsfunktion
G(s) = L{hs}L{ax} = Hs
Ax= K · Ê
20
s2 + 2 · D · Ê0 · s + Ê20
(3)
4 Proc. 27. Workshop Computational Intelligence, Dortmund, 23.-24.11.2017
FS =KS · !2
0
s2 + 2D!0s+ !20
• Integration industriepraktischer Probleme in Hochschullehre➔ mathematische Modellbildung, Simulation➔ physische Modelle
• Austausch etablierter Methoden, z.B. Sollwert-anpassung, Beschleunigungsrückführung
• Methodenvergleich, -sammlung