integralrechnung -...
TRANSCRIPT

Integralrechnung
Das Handout ist Bestandteil der Vortragsfolien zur Hoheren Mathematik; siehe die Hinweise auf der Internetseite
vhm.mathematik.uni-stuttgart.de fur Erlauterungen zur Nutzung und zum Copyright.
Integralrechnung 1-1
Riemann-Integral
Das bestimmte Integral einer stuckweise stetigen Funktion f ist durch∫ b
af (x) dx = lim
|∆|→0
∫ b
af∆ = lim
|∆|→0
∑k
f (ξk) ∆xk
definiert. Dabei bezeichnet ∆ : a = x0 < x1 < · · · < xn = b eine Zerlegungvon [a, b], ∆xk = xk − xk−1,
|∆| = maxk
∆xk
ist die maximale Intervallange und ξk ist ein beliebiger Punkt im k-tenIntervall.Die Summen auf der rechten Seite der Integraldefinition werdenRiemann-Summen genannt und konnen als Integral
∫f∆ einer
Treppenfunktion interpretiert werden.
Bestimmtes und unbestimmtes Integral Riemann-Integral 1-1
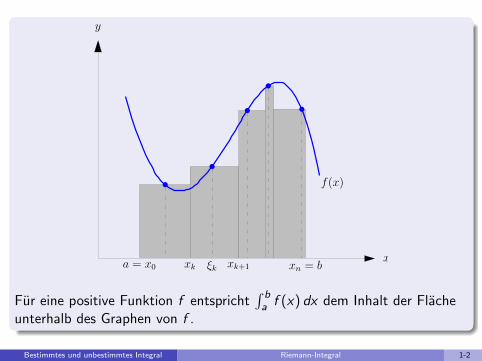
f(x)
y
xξka = x0 xk xk+1 xn = b
Fur eine positive Funktion f entspricht∫ ba f (x) dx dem Inhalt der Flache
unterhalb des Graphen von f .
Bestimmtes und unbestimmtes Integral Riemann-Integral 1-2

Beweis:
zeige Konvergenz der Riemann-Summen fur stetig differenzierbares f mitHilfe des Cauchy-KriteriumsfA 1
4 r eine Folge (∆i ) von Zerlegungen mit |∆i | → 0 betrachte zweiFolgenglieder ∆m und ∆n
Vergleich der Riemann-Summen mit Hilfe einer Zerlegung ∆ durchVereinigung der Unterteilungspunkte von ∆m und ∆n
∆m : x0 < · · · < xkm , ∆n : y0 < · · · < ykn ∆ : z0 < · · · < zk
Riemann-Summe fur ∆
k∑j=1
f (ζj) ∆zj , ζi ∈ [zi−1, zi ]
Mittelwertsatz
|f (t1)− f (t2)| ≤ (t2 − t1) maxt∈[t1,t2]
|f ′(t)|
Bestimmtes und unbestimmtes Integral Riemann-Integral 2-1
∣∣∣∣∫ f∆ −∫
f∆m
∣∣∣∣ =
∣∣∣∣∣∣k∑
j=1
f (ζj) ∆zj −km∑i=1
f (ξi ) ∆xi
∣∣∣∣∣∣=
∣∣∣∣∣∣km∑i=1
∑xi−1≤zj−1<zj≤xi
(f (ζj)− f (ξi ))∆zj
∣∣∣∣∣∣≤ |∆m| max
t∈[a,b]|f ′(t)|︸ ︷︷ ︸
=c
km∑i=1
∑xi−1≤zj−1<zj≤xi
∆zj︸ ︷︷ ︸=b−a
,
d.h. ∣∣∣∣∫ f∆ −∫
f∆m
∣∣∣∣ ≤ c (b − a) |∆m|
analoge Abschatzung fur |∫f∆ −
∫f∆n | ∣∣∣∣∫ f∆m −
∫f∆n
∣∣∣∣ ≤ c (b − a) (|∆m|+ |∆n|)→ 0 m, n→∞
Bestimmtes und unbestimmtes Integral Riemann-Integral 2-2
analoges Argument Konvergenz zweier Folgen gegen den gleichen Grenzwert
Beweis fur stuckweise stetiges f benutzt gleichmaßige Stetigkeit:
|f (x1)− f (x2)| ≤ ε fur |x1 − x2| < δ
Bestimmtes und unbestimmtes Integral Riemann-Integral 2-3
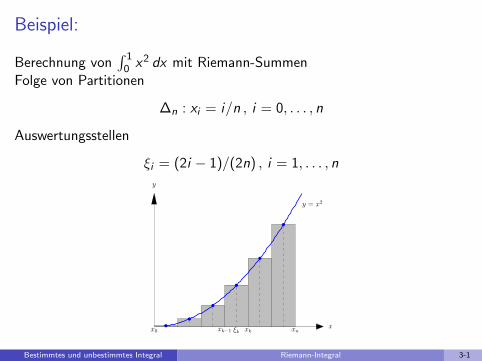
Beispiel:
Berechnung von∫ 1
0 x2 dx mit Riemann-SummenFolge von Partitionen
∆n : xi = i/n , i = 0, . . . , n
Auswertungsstellen
ξi = (2i − 1)/(2n) , i = 1, . . . , n
y = x2
y
xx0 xnxk−1 xkξk
Bestimmtes und unbestimmtes Integral Riemann-Integral 3-1
Grenzwert der Riemann-Summen∫f∆n =
n∑i=1
1
n
(2i − 1
2n
)2
=1
4n3
(4
n∑i=1
i2 − 4n∑
i=1
i +n∑
i=1
1
)
=1
4n3
(4n(n + 1)(2n + 1)
6− 4n(n + 1)
2+ n
)=
1
3− 1
12n2
=⇒limn→∞
∫f∆n =
1
3
Bestimmtes und unbestimmtes Integral Riemann-Integral 3-2

Eigenschaften des Integrals
Das bestimmte Integral besitzt folgende Eigenschaften:
Linearitat:
∫rf = r
∫f ,
∫f + g =
∫f +
∫g
Monotonie: f ≤ g =⇒∫
f ≤∫
g
Additivitat:
∫ b
af +
∫ c
bf =
∫ c
af
In Ubereinstimmung mit der letzten Eigenschaft definiert man∫ ab f = −
∫ ba f .
Bestimmtes und unbestimmtes Integral Riemann-Integral 4-1
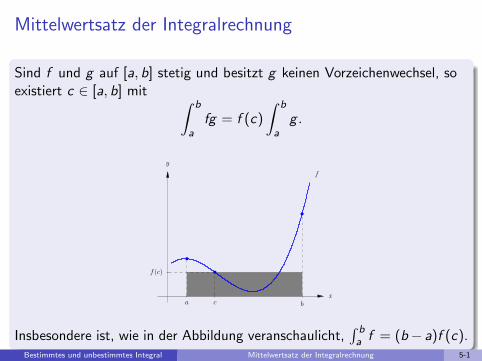
Mittelwertsatz der Integralrechnung
Sind f und g auf [a, b] stetig und besitzt g keinen Vorzeichenwechsel, soexistiert c ∈ [a, b] mit ∫ b
afg = f (c)
∫ b
ag .
a c b
f(c)
f
x
y
Insbesondere ist, wie in der Abbildung veranschaulicht,∫ ba f = (b− a)f (c).
Bestimmtes und unbestimmtes Integral Mittelwertsatz der Integralrechnung 5-1
Beweis:
o.B.d.A. g ≥ 0Abschatzung des Integranden
(min[a,b]
f ) g(x) ≤ f (x)g(x) ≤ (max[a,b]
f ) g(x)
Integration erhalt die Ungleichung, d.h.
(min[a,b]
f )
∫g ≤
∫fg ≤ (max
[a,b]f )
∫g
Zwischenwertsatz =⇒Gleichheit fur einen Wert von f zwischen min f und max fGegenbeispiel bei Vorzeichenwechsel von g :∫ 1
−1x2 dx︸ ︷︷ ︸>0
=
∫ 1
−1x︸︷︷︸f
· x︸︷︷︸g
dx 6= c
∫ 1
−1x dx = 0
Bestimmtes und unbestimmtes Integral Mittelwertsatz der Integralrechnung 6-1
Stammfunktion
Eine Funktion F mit F ′ = f ist eine Stammfunktion von f , und manschreibt ∫
f (x) dx = F (x) + c
fur die Menge aller Stammfunktionen, die als unbestimmtes Integral von fbezeichnet wird.Die Integrationskonstante c ∈ R ist beliebig. Beispielsweise ist
Fa(x) =
∫ x
af (t) dt
mit Fa(a) = 0 eine mogliche Stammfunktion.Nicht zu allen elementaren Funktionen ist die explizite Angabe einersolchen Stammfunktion moglich, ein Beispiel ist f (x) = exp
(x2).
Bestimmtes und unbestimmtes Integral Stammfunktion 7-1

Stammfunktionen einiger Grundfunktionen
f (x) F (x) f (x) F (x)
x s , s 6= −1 x s+1/(s + 1) 1/x ln |x |exp x exp x ln x x ln x − x
cos x sin x sin x − cos x
tan x − ln | cos x | 1/(1 + x2) arctan x
cosh x sinh x sinh x cosh x
1/√
1 + x2 arsinh x 1/√
1− x2 arcsin x
Bestimmtes und unbestimmtes Integral Stammfunktion 8-1
Hauptsatz der Integralrechnung
Ist F eine Stammfunktion einer stetigen Funktion f , d.h. f = F ′, so gilt∫ b
af (x) dx = F (b)− F (a)
bzw. in Kurzschreibweise ∫ b
af = [F ]ba .
Ein bestimmtes Integral lasst sich also als Differenz der Funktionswerteeiner Stammfunktion an den Intervallendpunkten berechnen.
Bestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 9-1

Beweis:
betrachte beide Seiten als Funktion von bUbereinstimmung fur b = a (beide Seiten Null) genugt Gleichheit der Ableitungen zu zeigenAbleitung der linken Seite
limh→0
1
h
(∫ b+h
af −
∫ b
af
)= lim
h→0
1
h
∫ b+h
bf
Mittelwertsatz =⇒∫ b+h
bf = (b + h − b) f (c) = h f (c)
mit c ∈ (b, b + h)f (c)→ f (b) =⇒ Ableitung der linken Seite gleich f (b)gleicher Wert fur die Ableitung der rechten Seite (F ′ = f )
Bestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 10-1
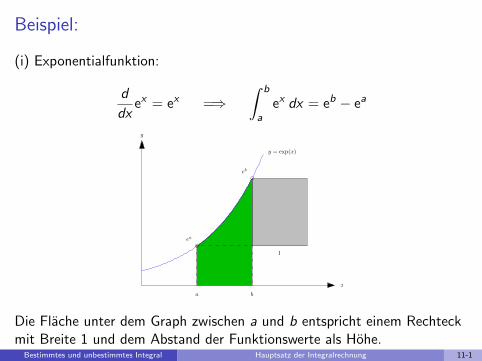
Beispiel:
(i) Exponentialfunktion:
d
dxex = ex =⇒
∫ b
aex dx = eb − ea
y = exp(x)
y
x
a b
ea
eb
1
Die Flache unter dem Graph zwischen a und b entspricht einem Rechteckmit Breite 1 und dem Abstand der Funktionswerte als Hohe.
Bestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 11-1
(ii) Logarithmusfunktion:
F (x) = ln |x |, f (x) = F ′(x) = 1/x , x 6= 0
=⇒ ∫ b
a1/x dx = ln |b| − ln |a| = ln |b/a| , 0 /∈ [a, b]
Bestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 11-2

Beispiel:
Arkustangensfunktion: Stammfunktion von f (x) = 1/(1 + x2)z.B. ∫ 1
0
dx
1 + x2= arctan(1)− arctan(0) =
π
4
Stammfunktion der Tangensfunkion
F (x) = − ln(cos x), |x | < π/2
(Kontrolle mit der Kettenregel: F ′(x) = −(cos x)−1(− sin x))z.B.∫ π/4
0tan x dx = − [ln(cos x)]
π/40 = − ln(1/
√2) + ln(1)︸︷︷︸
0
=1
2ln(2) ≈ 0.347
Bestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 12-1
Beispiel:
Kraft auf einen Korper der Masse m im Gravitationsfeld eines Planetenmit Masse M
f (x) = γmM
x2
γ: Gravitationskonstante, x : Abstand der Schwerpunkte∫f dx = F (x) = −γmM
x+ c
Arbeit bei Bewegung vom Abstand x = a zum Abstand x = b∫ b
af (x) dx = γmM
∫ b
a
1
x2dx = − [γmM/x ]ba = γmM(1/a− 1/b)
a: Radius r des Planeten, b →∞ Fluchtgeschwindigkeit durchGleichsetzen mit der kinetischen Energie:
m
2v2 = γ
mM
r⇒ v =
√γ
2M
r
vErde = 11.2 km/sBestimmtes und unbestimmtes Integral Hauptsatz der Integralrechnung 13-1
Partielle Integration
Aus der Produktregel (fg)′ = f ′g + fg ′ ergibt sich eine analoge Formel furunbestimmte Integrale:∫
f ′(x)g(x)dx = f (x)g(x)−∫
f (x)g ′(x) dx .
Entsprechend gilt ∫ b
af ′g = [fg ]ba −
∫ b
afg ′
fur bestimmte Integrale.Dabei ist zu beachten, dass der Randterm [fg ]ba verschwindet, wenn eineder beiden Funktionen an den Intervallendpunkten Null ist. Er entfalltebenfalls fur periodische Funktionen mit Periodenlange (b − a).
Integrationsregeln Partielle Integration 14-1

Beispiel:∫(1 + x)α dx = (1 + x)α+1/(α + 1) + c fur α 6= −1 =⇒∫
x︸︷︷︸u
√1 + x︸ ︷︷ ︸v ′
dx = x2
3(x + 1)3/2︸ ︷︷ ︸
v
−∫
1︸︷︷︸u′
·23
(1 + x)3/2 dx
=2
3x(1 + x)3/2 − 4
15(1 + x)5/2 + c
analog∫ 1
0x√
1− xu v ′
dx =
[−x 2
3(1− x)3/2
]1
0
+
∫ 1
01 · 2
3(1− x)3/2 dx
= 0−[
4
15(1− x)5/2
]1
0
=4
15
Integrationsregeln Partielle Integration 15-1
Beispiel:
partielle Integration logarithmischer Faktoren, z.B.∫xn ln |x | dx =
1
n + 1xn+1 ln |x | −
∫1
n + 1xn+1 1
xdx
=1
n + 1xn+1 ln |x | − 1
(n + 1)2xn+1 + c
analoge Integration von Ausdrucken der Form∑j ,k
aj ,kxj(ln |x |)k
jede partielle Integration reduziert den Exponenten des Logarithmus
d
x(ln |x |)k = k(ln |x |)k−1 1
x
Integrationsregeln Partielle Integration 16-1
Beispiel:
partielle Integration von Produkten aus Monomen undExponentialfunktionenrekursive Berechnung durch Reduktion des Polynomgrades:∫
xnex dx = xnex −∫
nxn−1ex dx
= xnex − nxn−1ex +
∫n(n − 1)xn−2ex dx = · · ·
= exn∑
k=0
(−1)n−kn!
k!xk + c
analog: partielle Integration von Produkten aus Monomen und Sinus oderKosinus
∫xn{
cos xsin x
}dx = xn
{sin x
− cos x
}−∫
nxn−1
{sin x
− cos x
}dx = · · ·
Integrationsregeln Partielle Integration 17-1
Beispiel:
partielle Integration von Produkten aus Exponentialfunktionen und Sinusoder Kosinus(i) zweimalige partielle Integration:∫
eax sin(bx) dx =1
aeax sin(bx)− b
a
∫eax cos(bx) dx
=1
aeax sin(bx)− b
a2eax cos(bx)− b2
a2
∫eax sin(bx) dx
Umformung ∫eax sin(bx) dx =
aeax sin(bx)− beax cos(bx)
a2 + b2+ c
Integrationsregeln Partielle Integration 18-1
(ii) komplexe Methode:Formel von Euler-Moivre =⇒
cos t = Re (exp(it))
∫ π
0et cos(t) dt = Re
(∫ π
0exp(t + it) dt
)= Re
([exp(t + it)
1 + i
]π0
)= Re
(−eπ − 1
1 + i
)= −(eπ + 1)/2
daeπ+iπ = eπ(−1) = −eπ
und1
1 + i=
1− i
1 + 1=⇒ Re
(1
1 + i
)=
1
2
Integrationsregeln Partielle Integration 18-2

Beispiel:
Orthogonalitat trigonometrischer Funktionenzweimalige partielle Integration ∫ π
−πsin(nx) sin(mx) dx = −
∫ π
−πn cos(nx)(− 1
mcos(mx)) dx
=n2
m2
∫ π
−πsin(nx) sin(mx) dx
(keine Randterme wegen Periodizitat)=⇒ ∫ π
−πsin(nx) sin(mx) dx = 0, m 6= n
m = n: einmalige partielle Integration und cos2(nx) = 1− sin2(nx) =⇒
2
∫ π
−πsin2(nx) dx =
∫ π
−π1 dx = 2π
analoges Argument Orthogonalitat von cos(nx)Integrationsregeln Partielle Integration 19-1

Dirac- und Heaviside-Funktion
Die Diracsche Delta-Funktion δ ist durch∫Rδf = f (0)
definiert, wobei f eine beliebige stetige Funktion ist, die ausserhalb einesIntervalls (a, b) verschwindet.Mit Hilfe von partieller Integration oder uber einen Grenzprozess kann δals verallgemeinerte Ableitung der Heavisideschen Sprungfunktion
H(x) =
{1, fur x > 0
0, sonst
interpretiert werden.
Integrationsregeln Delta-Funktion 20-1

Beweis:
0 ∈ (a, b), f (a) = 0 = f (b) =⇒∫ b
aH ′f = [Hf ] ba −
∫ b
aHf ′ = −
∫ b
0f ′ = −[f ]b0 = f (0)
(partielle Integration)f beliebig
∫H ′f =
∫δf , d.h. H ′ = δ
−2 0 2
0
1
−2 0 1n
2
0
1
−2 0 1n
2
0
1
Heaviside-Funktion H Naherung Hn Naherung δn = H ′n
Integrationsregeln Delta-Funktion 21-1

alternative Herleitung mit Hilfe eines Grenzprozesses:∫ b
aH ′nf = n
∫ 1/n
0f = f (tn)→ f (0)
aufgrund des Mittelwertsatzes
Integrationsregeln Delta-Funktion 21-2

Variablensubstitution
Aus der Kettenregel
d
dxF (g(x)) = f (g(x))g ′(x), f = F ′,
folgt durch Bilden von Stammfunktionen fur eine Substitution y = g(x)∫f (g(x))g ′(x) dx = F (y) + c =
∫f (y) dy .
Entsprechend gilt∫ b
af (g(x))g ′(x) dx = F (g(b))− F (g(a)) =
∫ g(b)
g(a)f (y) dy
fur bestimmte Integrale.
Integrationsregeln Variablensubstitution 22-1
Mit Hilfe von Differentialen laßt sich diese Formel in der Form∫ b
af (g(x))
dy
dxdx =
∫ g(b)
g(a)f (y) dy
schreiben.Ein einfacher Spezialfall ist eine lineare Variablensubstitution:
x 7→ y = px + q .
In diesem Fall ist ∫f (px + q) dx =
1
pF (y) + c
bzw. ∫ b
af (px + q) dx =
1
p[F ]pb+q
pa+q .
Integrationsregeln Variablensubstitution 22-2
Beispiel:
einfache Variablensubstitution bei erkennbarer innerer Ableitungz.B. ∫
(ln x)2
xdx
Substitution y = g(x) = ln x , g ′(x) = 1/x ∫g(x)2 g ′(x) dx =
∫y2 dy =
1
3y3 + c
Rucksubstitution ∫ln x2
xdx =
1
3(ln x)3 + c
Integrationsregeln Variablensubstitution 23-1

Beispiel:
∫e3y
e2y − 1dy
Substitutionx = ey , dx = eydy
Transformation des Integrals, Partialbruchzerlegung ∫x2
x2 − 1dx =
∫ (1 +
1
x2 − 1
)dx
=
∫1 dx +
∫1/2
x − 1dx −
∫1/2
x + 1dx
= x +1
2ln
∣∣∣∣x − 1
x + 1
∣∣∣∣+ c
Rucksubstitution von x = ey
F (y) = ey +1
2
∣∣∣∣ey − 1
ey + 1
∣∣∣∣+ c
Integrationsregeln Variablensubstitution 24-1
Beispiel:
∫ π/ε
0
sin(εx)
xdx
Substitution u = εx , dx = du/εTransformation der Integrationsgrenze x = π/ε↔ u = π ∫ π/ε
0
sin(εx)
xdx =
∫ π
0
sin u
udu
allgemeine Transformationregel:∫ b
af (rx)
dx
x=
∫ rb
raf (u)
du
u
bei Skalierung der Variablen, d.h. u = rx , dx/x = du/u
Integrationsregeln Variablensubstitution 25-1
Beispiel:
∫dx√
x2 − 6x + 5=
∫dx√
(x − 3)2 − 4=
1
2
∫dx√
((x − 3)/2)2 − 1
(i) unbestimmtes IntegralSubstitution y = (x − 3)/2, dx = 2dy ∫
dx√x2 − 6x + 5
=
∫dy√y2 − 1
Substitution y = cosh t, dy = sinh t dt ∫dy√y2 − 1
=
∫sinh t dt
sinh t=
∫dt = t + c
= arcosh y + c = arcosh((x − 3)/2) + c =
= ln
(x − 3
2+
1
2
√x2 − 6x + 5
)+ c
(cosh2 t − 1 = sinh2 t, Formel fur die Umkehrfunktion von cosh)Integrationsregeln Variablensubstitution 26-1
(ii) Beispiel eines bestimmten Integrals
∫ 7
5
dx√x2 − 6x + 5
= ln(4/2 +√
12/2)− ln 1
= ln(2 +√
3)
Integrationsregeln Variablensubstitution 26-2

Beispiel:
ViertelkreisK : y = f (x) =
√1− x2, 0 ≤ x ≤ 1PSfrag repla ements
0 0:5 1 1:500:511:5�101
Flacheninhalt ∫ 1
0f (x)dx =
π
4
Integrationsregeln Variablensubstitution 27-1

(i) Substitution x = sin u, dx = cos u du mit x = 0→ u = 0,x = 1→ u = π
2 =⇒∫ 1
0f (x)dx =
∫ π/2
0
√1− sin2 u︸ ︷︷ ︸
cos u
cos u du =1
2
π
2
(ii) Substitution x = cos u, dx = − sin u du mit x = 0→ u = −π/2,x = 1→ u = 2π =⇒∫ 1
0f (x)dx =
∫ 2π
−π/2− sin2 u du = −5π
4
falsches Ergebnis wegen falscher Berechnung der Wurzelrichtig:
√1− cos2 u = | sin u| korrektes Ergebnis∫ 1
0f (x)dx =
∫ 2π
−π/2| sin u|(− sin u)du =
π
4
Integrationsregeln Variablensubstitution 27-2
Elementare rationale Integranden
Die Stammfunktionen der drei Grundtypen rationaler Funktionen sind∫dx
ax + b=
1
aln |x + b/a|+ c∫
dx
(x − a)2 + b2=
1
barctan
(x − a
b
)+ c∫
(x − a)dx
(x − a)2 + b2=
1
2ln((x − a)2 + b2) + c
Rationale Integranden Elementare rationale Integranden 28-1
Beweis:
Uberprufung der Stammfunktionen durch Differenzierenalternativ: Umformung der Integranden(i)∫dy/y = ln |y |+ c =⇒∫
dx
ax + b=
1
a
∫dx
x + b/a=
1
aln |x + b/a|+ c
(ii) Umformung ∫dx
(x − a)2 + b2=
1
b2
∫dx
((x − a)/b)2 + 1
Substitution y = (x − a)/b, dx = b dy
1
b
∫dy
y2 + 1=
1
barctan y + c =
1
barctan
(x − a
b
)+ c
Rationale Integranden Elementare rationale Integranden 29-1

(iii) Substitution y = (x − a)2 + b2, dx = dy/(2(x − a)) ∫(x − a) dx
(x − a)2 + b2=
1
2
∫dy
y=
1
2ln |y |+ c
=1
2ln((x − a)2 + b2) + c
Rationale Integranden Elementare rationale Integranden 29-2

Beispiel:
replacemen
f(x) = 1/x
0 1 2 3
1
2
3
Inhalt der grauen Flache:
21
2+
∫ 2
1/2
1
xdx = 1 + ln 2− ln
1
2= 1 + ln 4
Rationale Integranden Elementare rationale Integranden 30-1
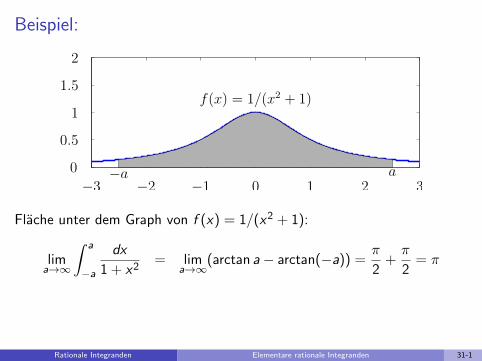
Beispiel:
−a a
f(x) = 1/(x2 + 1)
−3 −2 −1 0 1 2 3
0
0.5
1
1.5
2
Flache unter dem Graph von f (x) = 1/(x2 + 1):
lima→∞
∫ a
−a
dx
1 + x2= lim
a→∞(arctan a− arctan(−a)) =
π
2+π
2= π
Rationale Integranden Elementare rationale Integranden 31-1
Beispiel:
Berechnung der Stammfunktion von
r(x) =3x + 6
2x2 − 4x + 10
quadratische Erganzung des Nenners
2(x2 − 2x + 5) = 2((x − 1)2 + 22)
Anpassung des Zahlers
3(x + 2) = 3((x − 1) + 3)
Zerlegung in Standardausdrucke:
r(x) =3
2
x − 1
(x − 1)2 + 22+
9
2
1
(x − 1)2 + 22
Rationale Integranden Elementare rationale Integranden 32-1

Stammfunktionen der elementaren Integranden ∫r(x) dx =
3
4ln ((x − 1)2 + 4) +
9
4arctan
(x − 1
2
)+ c
Berechnung eines bestimmten Integrals durch Einsetzen der Grenzen in dieStammfunktionz.B. ∫ 3
1r(x) dx =
3
4(ln 8− ln 4) +
9
4(arctan (1)− arctan (0)) =
3
4ln 2 +
9
16π
Rationale Integranden Elementare rationale Integranden 32-2

Elementare rationale Integranden mit mehrfachenPolstellen
Fur n ∈ N ist ∫(x − a)−n−1dx = −1
n(x − a)−n + c .
Bei mehrfachen komplex konjugierten Polstellen gilt fur denentsprechenden quadratischen Faktor q(x) = (x − a)2 + b2∫
c(x − a) + d
q(x)n+1dx = − c
2n q(x)n+
d(x − a)
2b2n q(x)n+
d(2n − 1)
2b2n
∫dx
q(x)n.
Die Reduktion des Exponenten von q im Nenner ermoglicht eine rekursiveBerechnung der Stammfunktion.
Rationale Integranden mehrfache Pole 33-1

Beweis:
(i) erste Formel:Substitution y = x − a, dx = dy ∫
(x − a)−n−1dx =
∫y−n−1dy = −1
ny−n + c
(ii) zweite Formel, erster Term:Substitution y = (x − a)2 + b2, dx = dy/(2(x − a))
∫c(x − a)
((x − a)2 + b2)n+1dx =
c
2
∫dy
yn+1= − c
2nyn
= − c
2n((x − a)2 + b2)n
Rationale Integranden mehrfache Pole 34-1
(iii) zweite Formel, zweiter Term:zu zeigen ∫
d dx
q(x)n+1=
d(x − a)
2b2nq(x)n+
d(2n − 1)
2b2n
∫dx
q(x)n
mit q(x) = (x − a)2 + b2
Division durch d , Substitution y = (x − a)/b, dy = dx/b undMultiplikation mit b2n+1 aquivalente Identitat∫
b dy
(b2y2 + b2)n+1=
by
2b2n(b2y2 + b2)n+
2n − 1
2b2n
∫b dy
(b2y2 + b2)n
bzw. ∫dy
(y2 + 1)n+1=
y
2n(y2 + 1)n+
2n − 1
2n
∫dy
(y2 + 1)n
Rationale Integranden mehrfache Pole 34-2

Beweis durch partielle Integration des letzten Terms:∫1 · 1
(y2 + 1)ndy
=y
(y2 + 1)n+
∫y · 2ny
(y2 + 1)n+1dy
=y
(y2 + 1)n+ 2n
(∫dy
(y2 + 1)n−∫
dy
(y2 + 1)n+1
)(y2 = (y2 + 1)− 1)Auflosen nach
∫dy/(y2 + 1)n+1 behauptete Identitat
Rationale Integranden mehrfache Pole 34-3

Beispiel:
∫2x + 1
(x2 + 9)2dx
Einsetzen in die allgemeine Formel fur rationale Integranden mitmehrfachen Polen
−2
2(x2 + 9)+
x
18(x2 + 9)+
1
18
∫1
x2 + 9dx
(a = 0, b = 3, c = 2, d = 1 und n = 1)Formel fur die Stammfunktionen der elementaren Terme
x − 18
18(x2 + 9)+
1
18
(1
3arctan(x/3) + c
)
Rationale Integranden mehrfache Pole 35-1
Integration mit Partialbruchzerlegung
Durch reelle Partialbruchzerlegung lasst sich eine reelle rationale Funktionals Summe der drei elementaren Grundtypen
axn ,c
(ax + b)n,
c(x − a) + d
((x − a)2 + b2)n
mit n ∈ N0 , a, b, c , d ∈ R darstellen. Mit Hilfe der Stammfunktionen furdiese Grundfunktionen konnen somit die Stammfunktionen fur beliebigerationale Funktionen bestimmt werden.
Rationale Integranden Integration rationaler Funktionen 36-1
Beispiel:
Berechnung von∫r(x)dx , r(x) =
x5 + 10x3 + 5x2 − x + 25
x4 + 8x2 − 9
mit PartialbruchzerlegungPolynomdivision
r(x) = x +2x3 + 5x2 + 8x + 25
x4 + 8x2 − 9
Faktorisierung des Nenners
x4 + 8x2 − 9 = (x + 1)(x − 1)(x2 + 9)
Rationale Integranden Integration rationaler Funktionen 37-1
Ansatz
r(x)− x =a
x + 1+
b
x − 1+
cx
x2 + 9+
d
x2 + 9
Multiplikation mit dem Hauptnenner
2x3 + 5x2 + 8x + 25 =
a(x − 1)(x2 + 9) + b(x + 1)(x2 + 9) + (cx + d)(x2 − 1)
Koeffizienten-Vergleich =⇒ a = −1, b = 2, c = 1 und d = 2Stammfunktionen der Grundfunktionen ∫
x5 + 10x3 + 52 − x + 25
x4 + 8x2 − 9=∫
xdx −∫
dx
x + 1+
∫2dx
x − 1+
∫xdx
x2 + 9+
∫2dx
x2 + 9=
1
2x2 − ln |x + 1|+ 2 ln |x − 1|+ 1
2ln(x2 + 9) +
2
3arctan
(x3
)+ c
Rationale Integranden Integration rationaler Funktionen 37-2
Integration trigonometrischer Polynome
Aus ∫eikx dx =
1
ikeikx + c , 0 6= k ∈ Z ,
folgt fur ein trigonometrisches Polynom
p(x) =∑|k|≤n
ckeikx ,
dass ∫p(x) dx = c + c0x +
∑06=|k|≤n
ckikeikx
sowie∫ ππ p = 2πc0.
Mit Hilfe der Formel von Euler-Moivre konnen auf diese Weise auchbeliebige Polynome in sin(kx) und cos(kx) integriert werden.
Trigonometrische Integranden Integration trigonometrischer Polynome 38-1
Beispiel:
Berechnung von ∫ π
−πsin4 x dx
(i) komplexe Methode:Formel von Euler-Moivre, binomische Formel Integrand(
1
2i
(e ix − e−ix
))4
=1
16
(4
2
)e2ixe−2ix︸ ︷︷ ︸=6
+∑k 6=0
ckeikx
Integral: 2π · 6/16 = 3π/4
Trigonometrische Integranden Integration trigonometrischer Polynome 39-1
(ii) partielle Integration:
∫sin4 xdx =
∫sin x sin3 x dx
= − cos x sin3 x + 3
∫cos2 x sin2 x dx
= − cos x sin3 x + 3
∫sin2 x dx − 3
∫sin4 x dx
(cos2 = 1− sin2)Auflosen nach
∫sin4 ∫ π
−πsin4 x dx = −1
4
[cos x sin3 x
]π−π +
3
4
∫ π
−πsin2 x dx = 0 + 3π/4
Trigonometrische Integranden Integration trigonometrischer Polynome 39-2

Trigonometrische Substitutionen
Mit Hilfe der folgenden Substitutionen lassen sich eine Reihe vonelementaren algebraischen Integranden explizit berechnen:
x = a sin t : dx = a cos t dt√a2 − x2 = a cos t
x = a tan t : dx = a/ cos2 t dt√a2 + x2 = a/ cos t
x = a/ cos t : dx = a sin t/ cos2 t dt√x2 − a2 = a tan t
Gegebenenfalls mussen die Argumente der Wurzel zunachst durchquadratische Erganzung auf Standardform gebracht werden.Mit den trigonometrischen Substitutionen werden rationale Funktionen inx und
√. . . in rationale Funktionen von cos t und sin t A 1
4 berfA 14 hrt. Diese
kA¶nnen gegebenenfalls durch die weitere Substitution z = tan(t/2) inrationale Integranden r(z) umgewandelt werden.
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 40-1

Beispiel:
∫ 1/2
0
√1− x2 dx
(i) trigonometrische Substitution:
x = sin t, dx = cos t dt, x = 0→ t = 0, x = 1/2→ t = π/6
∫ π/6
0cos2 t dt =
[1
2(sin t cos t + t)
]π/6
0
=
√3
8+
π
12
Rucktransformation von [. . .] Stammfunktion∫ √1− x2dx =
x
2
√1− x2 +
1
2arcsin x + c
(cos t =√
1− sin2 t =√
1− x2)
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 41-1

(ii) geometrisches Argument:
0 1
1
x
A
B
Flache unter dem Graph von√
1− x2: Summe von zwei TeilflachenDreieck: |A| = x
√1− x2/2
Kreissektor mit Offnungswinkel t: |B| = t/2 = (1/2) arcsin x gleiche Stammfunktion |A|+ |B|
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 41-2
Beispiel:
∫dx
x√
1 + x2
trigonometrische Substitution x = tan t, dx = 1/ cos2 t dt ∫dt/ cos2 t
tan t/ cos t=
∫dt
sin t= ln | tan
t
2|+ c
(√
1 + x2 = 1/ cos t, Formel fur die Stammfunktion von 1/ sin t, die mitHilfe der Substitution z = tan(t/2) hergeleitet bzw. durch Differenzierenkontrolliert werden kann)Rucksubstitution =⇒∫
dx
x√
1 + x2= ln | tan(
1
2arctan x)|+ c
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 42-1

bestimmtes Integral ∫ ∞1
dx
x√
1 + x2
Verwendung der berechneten Stammfunktion
ln | tanπ
4| − ln | tan
π
8| = ln 1− ln(
√2− 1) = ln(1 +
√2)
Berechnung von tan(π/8) mit Hilfe der Diagonale einer Raute mit spitzemWinkel π/4
(0, 0) (1, 0)
(1/√2, 1/
√2) (1 + 1/
√2, 1/
√2)
=⇒ tan(π/8) = (1/√
2)/(1/√
2 + 1) = 1√2+1
=√
2− 1
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 42-2
Beispiel:
∫dx√
x2 − 6x + 5
quadratische Erganzung Standardform der Wurzel∫dx√
(x − 3)2 − 4=
1
2
∫dx√
((x − 3)/2)2 − 1
vorbereitende Substitution y = (x − 3)/2, dx = 2dy Vereinfachung:∫dx√
x2 − 6x + 5=
∫dy√y2 − 1
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 43-1

trigonometrische Substitution y = 1/ cos t, dy = sin t/ cos2 t dt,√y2 − 1 = tan t ∫
dy√y2 − 1
=
∫dt
cos t= ln
∣∣∣∣ 1
cos t+ tan t
∣∣∣∣+ c
(Formel fur∫
cos−1, Uberprufung durch Differenzieren)Rucksubstitution
ln∣∣∣y + y
√y2 − 1
∣∣∣+ c = ln
∣∣∣∣∣∣x − 3
2+
√(x − 3
2
)2
− 1
∣∣∣∣∣∣+ c
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 43-2
Hyperbolische Substitutionen
Mit Hilfe der folgenden Substitutionen lassen sich eine Reihe vonelementaren algebraischen Integranden explizit berechnen:
x = a sinh t : dx = a cosh t dt√x2 + a2 = a cosh t
x = a cosh t : dx = a sinh t dt√x2 − a2 = a sinh t
Gegebenenfalls mussen die Argumente der Wurzel zunachst durchquadratische Erganzung auf Standardform gebracht werden.Mit den hyperbolischen Substitutionen werden rationale Funktionen in xund√. . . in rationale Funktionen von et A 1
4 berfA 14 hrt. Diese kA¶nnen
gegebenenfalls durch die weitere Substitution z = et in rationaleIntegranden r(z) umgewandelt werden.
Trigonometrische Integranden Trigonometrische und hyperbolische Substitutionen 44-1

Rationale Funktionen von Sinus und Kosinus
FA 14 r die Substitution
x = tan(t/2), dt =2
1 + x2dx , −π < t < π
ist
cos t =1− x2
1 + x2, sin t =
2x
1 + x2,
und fur eine beliebige rationale Funktion r gilt∫r(cos t, sin t) dt =
∫r
(1− x2
1 + x2,
2x
1 + x2
)2
1 + x2dx .
Damit lasst sich ein trigonometrischer in einen rationalen Integrandenuberfuhren, der mit Partialbruchzerlegung berechnet werden kann.
Trigonometrische Integranden Rationale trigonometrische Funktionen 45-1
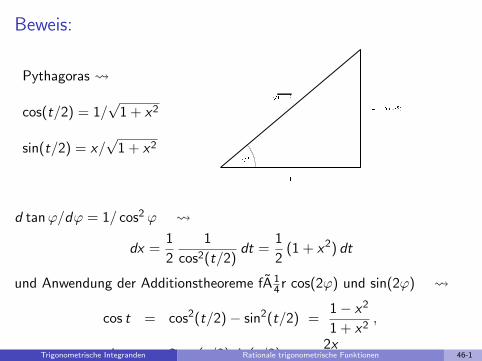
Beweis:
Pythagoras
cos(t/2) = 1/√
1 + x2
sin(t/2) = x/√
1 + x2 PSfrag repla ements 1
x = tan(t=2)p1 + x2t=2
d tanϕ/dϕ = 1/ cos2 ϕ
dx =1
2
1
cos2(t/2)dt =
1
2(1 + x2) dt
und Anwendung der Additionstheoreme fA 14 r cos(2ϕ) und sin(2ϕ)
cos t = cos2(t/2)− sin2(t/2) =1− x2
1 + x2,
sin t = 2 cos(t/2) sin(t/2) =2x
1 + x2Trigonometrische Integranden Rationale trigonometrische Funktionen 46-1
Beispiel:
∫dt
sin t
Substitution x = tan(t/2), dt = 2 dx/(1 + x2) ∫1 + x2
2x
2
1 + x2dx =
∫dx
x= ln |x |+ c = ln | tan(t/2)|+ c
analog∫dt
cos t=
∫1 + x2
1− x2
2
1 + x2dx =
∫ (1
1− x+
1
1 + x
)dx = ln
∣∣∣∣1 + x
1− x
∣∣∣∣+c
Rucksubstitution ∫dt
cos t= ln
∣∣∣∣1 + tan (t/2)
1− tan (t/2)
∣∣∣∣+ c
Trigonometrische Integranden Rationale trigonometrische Funktionen 47-1
Uneigentliches Integral
Fur eine auf [a, b) stuckweise stetige Funktion f wird durch∫ b
af = lim
c→b−
∫ c
af
der Integralbegriff auf unendliche Intervalle (b =∞) und unbeschrankteIntegranden (f (b) = ±∞) erweitert.Analog wird eine Singularitat an der unteren oder an beiden Grenzenbehandelt. Im letzteren Fall muss der Grenzwert unabhangig von der Wahlder Folgen c → a+, d → b− sein. Hinreichend fur die Existenz einesuneigentlichen Integrals ist die absolute Intergrierbarkeit von f , d. h.∫ d
c|f (x)| ≤ const
fur alle Teilintervalle [c , d ] ⊂ (a, b).
Uneigentliche Integrale Uneigentliches Integral 48-1
Beispiel:
Berechnung des uneigentlichen Integrals∫ ∞0
e−x dx
Grenzwert
limb→∞
∫ b
0e−x dx = lim
b→∞
[−e−x
]b0
= limb→∞
(−e−b + 1
)= 1
direkte Verwendung uneigentlicher Grenzen bei elementaren Grenzwerten:∫ ∞0
e−x dx = [−e−x ]∞0 = 0− (−1) = 1
Uneigentliche Integrale Uneigentliches Integral 49-1
Beispiel:
uneigentliches Integral ∫ ∞2
1
x(ln x)rdx
Substitution y = ln x , dy = dx/x
∫ b
2
1
x(ln x)rdx =
∫ ln b
ln 2
1
y rdy =
(ln b)1−r − (ln 2)1−r
1− r, r 6= 1
ln(ln b)− ln(ln 2) , r = 1
limb→∞ . . . existiert genau dann wenn r > 1:∫ ∞2
1
x(ln x)rdx =
(ln 2)1−r
r − 1
Uneigentliche Integrale Uneigentliches Integral 50-1

Beispiel:
uneigentliches Integral ∫ π/2
0
sin x√cos x
dx
Singularitat bei x = π/2 betrachte obere Grenze b < π/2:∫ b
0
sin x√cos x
=[−2√
cos x]b
0= −2
√cos b + 2
Grenzwert∫ π/2
0
sin x√cos x
dx = limb→π/2
∫ b
0
sin x√cos x
= limb→π/2
(−2√
cos b + 2)
= 2
Uneigentliche Integrale Uneigentliches Integral 51-1
Beispiel:
uneigentliches Integral ∫ ∞−∞
1 + 2x
1 + x2dx
Stammfuntion des Integranden:
arctan(x) + ln(1 + x2)
(i) falsche Berechnung:
∫ ∞−∞
1 + 2x
1 + x2dx = lim
b→∞
∫ b
−b
1 + 2x
1 + x2dx = lim
b→∞
[arctan(x) + ln(1 + x2)
]b−b
= limb→∞
(2 arctan(b)) = π
(arctan(−b) = − arctan(b))
Uneigentliche Integrale Uneigentliches Integral 52-1
(ii) korrekte Argumentation:unabhangige Betrachtung der unteren und oberen Grenze
∫ 0
c
1 + 2x
1 + x2dx =
(− arctan(c)− ln(1 + c2)
)∫ d
0
1 + 2x
1 + x2dx =
(arctan(d) + ln(1 + d2)
)=⇒ keine endlichen Grenzwerte in beiden Fallen (c → −∞, d →∞)=⇒ Divergenz des uneigentlichen Integrals∫ ∞
−∞
1 + 2x
1 + x2dx
Uneigentliche Integrale Uneigentliches Integral 52-2

Vergleichskriterium fur uneigentliche Integrale
Ist g eine Majorante fur f , d. h. gilt
|f (x)| ≤ |g(x)| a < x < b
so folgt aus der absoluten Integrierbarkeit von g die absoluteIntegrierbarkeit von f und die Existenz des Integrals∫ b
af (x) dx .
Uneigentliche Integrale Vergleichskriterium fur uneigentliche Integrale 53-1

Beweis:
betrachte o.B.d.A. eine Singularitat an der oberen Grenze:∫ ba f = limc→b−
∫ ca f
r(c) =
∫ c
a|f |
monoton wachsend, beschrankt durch∫ ba |g |
=⇒ Konvergenz fur c → b− und somit die Existenz von∫ ba |f |
s(c) =
∫ c
a(f + |f |︸ ︷︷ ︸≥0
)
ebenfalls monoton wachsend, beschrankt durch 2∫ ba |g |
=⇒ Existenz von∫ ba (f + |f |)
Subtraktion =⇒ Existenz von∫ b
af =
∫ b
a(f + |f |)−
∫ b
a|f |
Uneigentliche Integrale Vergleichskriterium fur uneigentliche Integrale 54-1
Beispiel:
Vergleichsfunktion f (x) = x r
∫ b
ax r dx =
br+1 − ar+1
r + 1, r 6= −1
ln(b)− ln(a), r = −1, 0 < a < b <∞
(i) b →∞:Konvergenz fur r < −1 Existenz von∫ ∞
1x r dx , r < −1
(ii) a→ 0+:Konvergenz fur r > −1 Existenz von∫ 1
0x r dx , r > −1
Uneigentliche Integrale Vergleichskriterium fur uneigentliche Integrale 55-1
Beispiel:
uneigentliches Integral ∫ ∞0
sin(x)
xdx
Aufspaltung in zwei Anteile:∫∞
0 . . . =∫ 1
0 . . .+∫∞
1 . . .Existenz des Integrals uber [0, 1] wegen Stetigkeit des IntegrandenUmformung des Integrals uber [1,∞] mit partieller Integration:∫ b
1
sin(x)
xdx =
[−cos(x)
x
]b1
−∫ b
1
cos(x)
x2dx
erster Term → cos(1) fur b →∞zweiter Term: Integrand majorisiert durch∣∣∣∣cos(x)
x2
∣∣∣∣ ≤ ∣∣∣∣ 1
x2
∣∣∣∣=⇒ Konvergenz nach dem Vergleichskriterium
Uneigentliche Integrale Vergleichskriterium fur uneigentliche Integrale 56-1

Wert des uneigentlichen Integrals:∫ ∞0
sin(x)
xdx =
π
2
(Berechnung mit Methoden der Fourier-Analysis)
Uneigentliche Integrale Vergleichskriterium fur uneigentliche Integrale 56-2

Gamma-Funktion
Die durch
Γ(x) =
∫ ∞0
tx−1e−t dt, x ∈ (0,∞) ,
definierte Gamma-Funktion erfullt die Funktionalgleichung
Γ(x + 1) = xΓ(x) .
Insbesondere ist Γ(n + 1) = n!, n ∈ N.
−4 −3 −2 −1 0 1 2 3 4 5−10
−8
−6
−4
−2
0
2
4
6
8
10
Uneigentliche Integrale Gamma-Funktion 57-1

Mit Hilfe der Funktionalgleichung lasst sich die Gamma-Funktion auch furnegative Argumente definieren. Wie aus dem abgebildetenFunktionengraphen ersichtlich ist, besitzt sie einfache Pole furx = 0,−1, . . ..Alternativ liefert die Gaußsche Definition der Gamma-Funktion,
Γ(x) = limn→∞
n!nx
x(x + 1) · · · (x + n),
eine Darstellung auf ganz R \ Z−.
Uneigentliche Integrale Gamma-Funktion 57-2
Beweis:
(i) Existenz des Integrals:
Konvergenz von∫ 1
0 f nach dem Vergleichskriterium (x > 0)
f (x) = tx−1e−t ≤ tx−1
Konvergenz von∫∞
1 f ebenfalls nach dem Vergleichskriterium
f (x) ≤ t−2 ⇔ tx+1 ≤ et
erfullt fur t ≥ n! mit n ≥ x + 2Begrundung mit Reihendarstellung der Exponentialfunktion:
tx+1 ≤ tn−1 ≤ tn/n! ≤ et
Uneigentliche Integrale Gamma-Funktion 58-1

(ii) Funktionalgleichung:partielle Integration
Γ(x + 1) =
∫ ∞0
txe−t dt =[−txe−t
]∞0
+
∫ ∞0
xtx−1e−t dt
= 0 + x
∫ ∞0
tx−1e−t dt = xΓ(x)
Γ(1) =∫∞
0 e−t dt = [−e−t ]∞0 = 1 =⇒
Γ(n + 1) = n!, n ∈ N
Uneigentliche Integrale Gamma-Funktion 58-2