versuch 1b drehzahlregelung eines gleichstrommotors · scicos und erstellen sie mit dem betreuer...
TRANSCRIPT
Technische Universitat Berlin
Fakultat IV Elektrotechnik und Informatik
Fachgebiet Regelungssysteme
Leitung: Prof. Dr.-Ing. Jorg Raisch
Praktikum Grundlagen der Regelungstechnik
Versuch 1b
Drehzahlregelung eines Gleichstrommotors
1 Einfuhrung
In diesem Versuch soll fur eine reale elektrische Antriebsstrecke eine kontinuierliche Kaskadenregelung nach
dem Wurzelorts- und Frequenzkennlinienverfahren entworfen und anschließend erprobt werden.
Der Versuch erstreckt sich uber zwei Termine: im ersten Teil wird eine Regelung fur den Ankerstrom erar-
beitet. Die Ergebnisse dienen als Basis fur den zweiten Versuchsteil, in dem der unterlagerte Stromregelkreis
um eine Drehzahlregelung erganzt wird.
Getriebe LastMotorStromri hterStromreglerDrehzahlregler
Solldrehzahl
Stoerung
Regeleinri htung Antriebsstre ke
Ankerstrom iA(t)
Drehzahl ω(t)
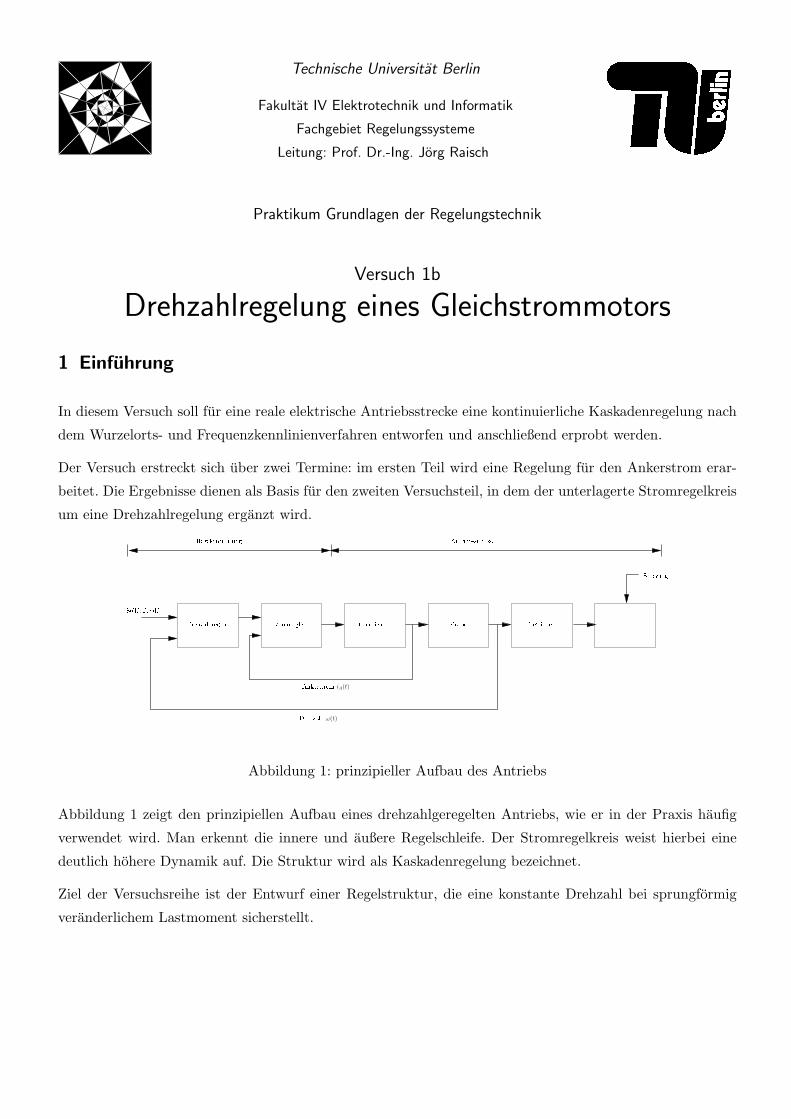
Abbildung 1: prinzipieller Aufbau des Antriebs
Abbildung 1 zeigt den prinzipiellen Aufbau eines drehzahlgeregelten Antriebs, wie er in der Praxis haufig
verwendet wird. Man erkennt die innere und außere Regelschleife. Der Stromregelkreis weist hierbei eine
deutlich hohere Dynamik auf. Die Struktur wird als Kaskadenregelung bezeichnet.
Ziel der Versuchsreihe ist der Entwurf einer Regelstruktur, die eine konstante Drehzahl bei sprungformig
veranderlichem Lastmoment sicherstellt.

2 Versuchsaufbau
2.1 Aufbau der Strecke
Den Aufbau der Versuchsstrecke zeigt Abbildung 2.
Abbildung 2: Regelstrecke
Die Strecke besteht aus einem Leistungsverstarker und einer Gleichstrommaschine, welcher zur Erhohung
des Tragheitsmoments bereits eine Schwungscheibe auf die Welle montiert wurde. Um ein Lastmoment zu
erzeugen, kann ein Filzblock uber eine Feder gegen die Schwungscheibe gepresst werden. Dieser bewirkt eine
starke Reibung.
Der Leistungsverstarker besitzt PT1-Dynamik mit kleiner Verzogerungszeitkonstante und liefert eine maxi-
male Ausgangsspannung von 15V.
2.2 Ansteuerung und Messung
Die Ansteuerung erfolgt uber eine Datenerfassungskarte. Mit einer Echtzeitanwendung kann die Eingangs-
spannung des Leistungsverstarkers vorgegeben werden. Ebenso werden die Messwerte angezeigt und gespei-
chert.
Als Messgroßen stehen der Ankerstrom iA und die Winkelgeschwindigkeit ω direkt zur Verfugung. Der
Ankerstrom weist hierbei sehr starkes Messrauschen auf, was beim Reglerentwurf bedacht werden muss. Die
Drehzahl/Winkelgeschwindigkeit wird uber einen Tachogenerator erfasst.
Die Regler sollen in Scilab/Scicos realisiert werden. Am Versuchsstand wird mit den erstellten Scicos-
Diagrammen ein echtzeitfahiges Programm erstellt, welches den entworfenen Regler an den realen Motor
koppelt.
2
2.3 Parameter
Die folgenden Parameter sind gegeben.
Gleichstrommotor:
Ankerwiderstand RA = 10, 6Ω
Ankerinduktivitat LA = 0, 82mH
Motorkonstante km = 0, 0527NmA
Ankertragheitsmoment Jm = 1, 16 · 10−6kgm2
Reibungskonstante cµ = 0, 4 · 10−6Nms
Schwungscheibe:
Masse Ms = 68g
Radius rs = 2, 5cm
Leistungsverstarker:
Zeitkonstante Tv = 0, 0002s
Verstarkung V = 3
3 Drehzahlregelung
Ziel des zweiten Versuchteils ist es, einen Drehzahlregelkreis zu entwerfen, der vorgegebene Winkelgeschwin-
digkeiten einstellt und Storungen in Form von Lastmomentanderungen kompensiert. Zusatzlich soll eine
Anti-Windup-Schaltung fur beide Regler der Kaskadenregelung entworfen werden, um Windup-Effekte und
eine Uberlastung des Leistungsverstarkers zu verhindern.
3.1 Kaskadenregelung
Fur die Drehzahlregelung elektrischer Antriebe werden sehr haufig Kaskadenregelkreise eingesetzt. Wir
wollen zunachste den Aufbau, das Wirkprinzip und den Entwurf von Regelkreisen mit Kaskadenstrukur
wiederholen.
3.1.1 Aufbau und Wirkprinzip
In Abbildung 3 ist das Blockschaltbild einer Kaskadenregelung dargestellt. Neben der Regelgroße y wird eine
weitere Systemgroße gemessen und als Hilfsregelgroße ϕ zuruckgefuhrt. Die gesamte Regelstrecke G besteht
nun aus zwei Teilstrecken G1 und G2. Auf diese Weise wird ein unterlagerter innerer Regelkreis bestehend
aus dem Streckenteil G1 und dem Regler K1 aufgebaut.
Die Kaskadenstruktur kann im Vergleich mit dem einschleifigem Standardregelkreis eine bessere Dynamik
erzielen. Hierfur gibt es mehrere Grunde:
3

u ϕ
G
K2r K1 G1 G2 y
y
Abbildung 3: Kaskadenregelung
1. Auftretende Storungen im ersten Streckenteil (vor dem Abgreifen der Große ϕ) wirken nur abge-
schwacht auf die Regelgroße y, da diese schon im inneren Regelkreis ausgeregelt werden konnen. Dieser
Vorteil wird besonders deutlich, wenn der zweite Streckenteil G2 große Verzogerungen oder Totzeiten
aufweist. Eine Kaskadenregelung kann in diesen Fallen Storungen, die im ersten Streckenteil auftreten
im Vergleich mit dem einschleifigem Kreis wesentlich schneller ausregeln.
2. Die Hilfsregelgroße ϕ lasst sich durch geeignete Dimensionierung der Regler K1 und K2 begrenzen.
3. Die Auswirkung von nichtlinearen Ubertragungsgliedern wird von jeder Kaskade aufwarts mehr und
mehr eingeschrankt, so dass sich durch den Einsatz einer Kaskadenregelung eine Verbesserung der
Linearisierung erreichen lasst.
Der Reglerentwurf fur die Kaskadenregelung ist durch sukzessiven Entwurf der Teilregler K1 und K2 um-
setzbar und dadurch besonders einfach. Ein Nachteil ist der erhohte Hardwareaufwand, besonders durch
zusatzlich notwendige Messeinrichtungen zur Erfassung der Hilfsregelgroße ϕ.
3.1.2 Entwurf
Der Entwurf wird sukzessiv durchgefuhrt, d.h. zunachst wird ein Regler K1 fur den inneren Regelkreis mit
der Regelstrecke G1 entworfen (Abbildung 4). Die Anforderungen an den inneren Kreis konnen sich von den
Anforderungen an den gesamten Regelkreis unterscheiden. Es wird meist ein “ausreichend schneller” Regler
gefordert, um auftretende Storungen schnell auszuregeln.
Anschließend kann die Ubertragungsfunktion des geschlossenen inneren Kreises bestimmt werden:
T1(s) =K1(s)G1(s)
1 +G1(s)K1(s).
Die resultierende Regelstrecke G′ des außeren Regelkreises ergibt damit
G′(s) = T1(s)G2(s).
Der Regler K2 kann nun anhand eines einschleifigen Kreises mit der Regelstrecke G′ entworfen werden
(Abbildung 5). Hierbei mussen die Anforderungen an den gesamten Regelkreis erfullt werden.
4
K2 G2
G
r yK1 G1u
y
ϕ
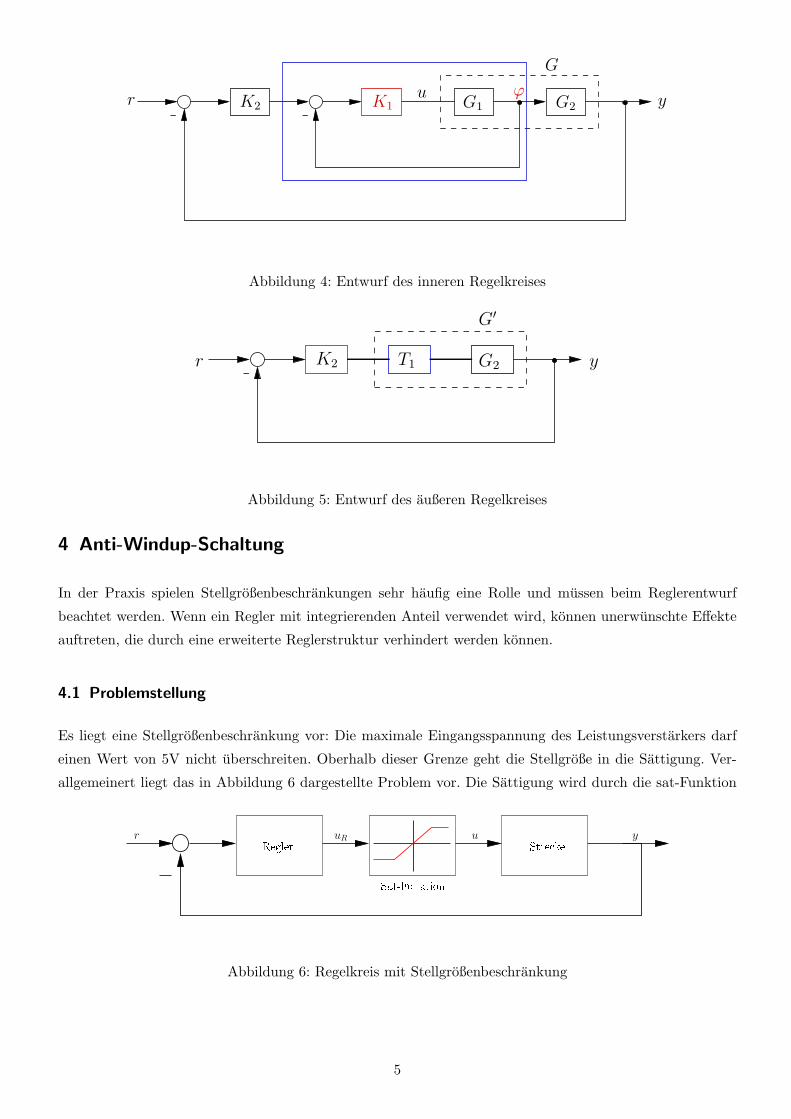
Abbildung 4: Entwurf des inneren Regelkreises
K2
G′
G
T1 G2 yr
Abbildung 5: Entwurf des außeren Regelkreises
4 Anti-Windup-Schaltung
In der Praxis spielen Stellgroßenbeschrankungen sehr haufig eine Rolle und mussen beim Reglerentwurf
beachtet werden. Wenn ein Regler mit integrierenden Anteil verwendet wird, konnen unerwunschte Effekte
auftreten, die durch eine erweiterte Reglerstruktur verhindert werden konnen.
4.1 Problemstellung
Es liegt eine Stellgroßenbeschrankung vor: Die maximale Eingangsspannung des Leistungsverstarkers darf
einen Wert von 5V nicht uberschreiten. Oberhalb dieser Grenze geht die Stellgroße in die Sattigung. Ver-
allgemeinert liegt das in Abbildung 6 dargestellte Problem vor. Die Sattigung wird durch die sat-Funktion
Regler Stre ke
Sat-Funktion
uR
R
R
R
ur y
Abbildung 6: Regelkreis mit Stellgroßenbeschrankung
5
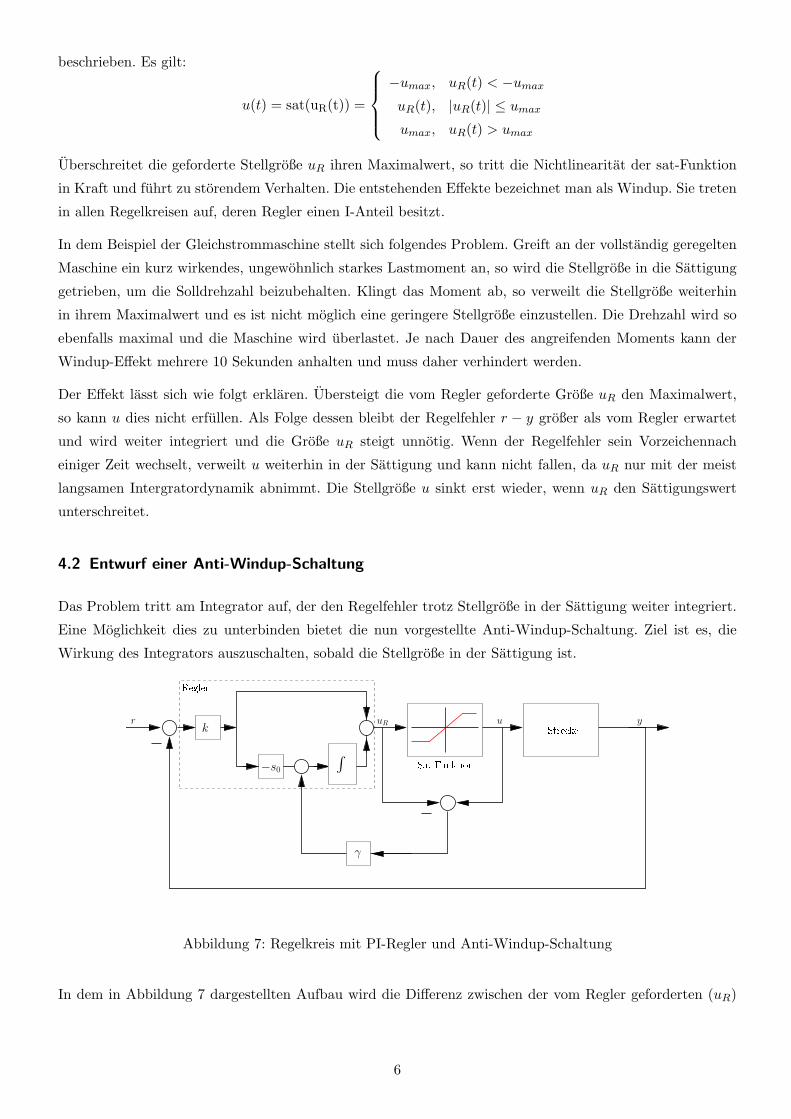
beschrieben. Es gilt:
u(t) = sat(uR(t)) =
−umax, uR(t) < −umaxuR(t), |uR(t)| ≤ umaxumax, uR(t) > umax
Uberschreitet die geforderte Stellgroße uR ihren Maximalwert, so tritt die Nichtlinearitat der sat-Funktion
in Kraft und fuhrt zu storendem Verhalten. Die entstehenden Effekte bezeichnet man als Windup. Sie treten
in allen Regelkreisen auf, deren Regler einen I-Anteil besitzt.
In dem Beispiel der Gleichstrommaschine stellt sich folgendes Problem. Greift an der vollstandig geregelten
Maschine ein kurz wirkendes, ungewohnlich starkes Lastmoment an, so wird die Stellgroße in die Sattigung
getrieben, um die Solldrehzahl beizubehalten. Klingt das Moment ab, so verweilt die Stellgroße weiterhin
in ihrem Maximalwert und es ist nicht moglich eine geringere Stellgroße einzustellen. Die Drehzahl wird so
ebenfalls maximal und die Maschine wird uberlastet. Je nach Dauer des angreifenden Moments kann der
Windup-Effekt mehrere 10 Sekunden anhalten und muss daher verhindert werden.
Der Effekt lasst sich wie folgt erklaren. Ubersteigt die vom Regler geforderte Große uR den Maximalwert,
so kann u dies nicht erfullen. Als Folge dessen bleibt der Regelfehler r − y großer als vom Regler erwartet
und wird weiter integriert und die Große uR steigt unnotig. Wenn der Regelfehler sein Vorzeichennach
einiger Zeit wechselt, verweilt u weiterhin in der Sattigung und kann nicht fallen, da uR nur mit der meist
langsamen Intergratordynamik abnimmt. Die Stellgroße u sinkt erst wieder, wenn uR den Sattigungswert
unterschreitet.
4.2 Entwurf einer Anti-Windup-Schaltung
Das Problem tritt am Integrator auf, der den Regelfehler trotz Stellgroße in der Sattigung weiter integriert.
Eine Moglichkeit dies zu unterbinden bietet die nun vorgestellte Anti-Windup-Schaltung. Ziel ist es, die
Wirkung des Integrators auszuschalten, sobald die Stellgroße in der Sattigung ist.
Stre ke
Sat-Funktion
uR
R
u y
R
R
R
r
Regler
γ
k
−s0
∫
Abbildung 7: Regelkreis mit PI-Regler und Anti-Windup-Schaltung
In dem in Abbildung 7 dargestellten Aufbau wird die Differenz zwischen der vom Regler geforderten (uR)
6

und der begrenzten Stellgroße u uber einen Faktor γ auf den Integratoreingang zuruckgekoppelt. Ein Wert
u− uR ist nur bei Uberschreiten der Begrenzung ungleich Null. Ist dies der Fall (bei uR > u), so liefert die
Differenz etwas Negatives. Der Integratoreingang wird auf Null getrieben.
Alternativ bieten sich Anti-Windup-Schaltungen an, die den Integratoreingang durch Logik-Schaltungen bei
Uberschreiten der Beschrankung auf Null setzen.
5 Vorbereitungsaufgaben
Fuhren Sie in diesem Versuchsteil ihre Simulationen in Scicos durch. Implementieren Sie dafur die PI-Anteile
der beiden Regler durch Integratorschaltungen wie in Abbildung 8.
$$\int$$
$$\int$$
−s0
∫k
Abbildung 8: Struktur eines PI-Reglers
1. Geben Sie das Blockschaltbild der Regelstrecke mit der Stromregelung aus Versuchsteil 1a an und
ermitteln Sie die Ubertragungsfunktion Gω(s) = Ω(s)Ri(s)
zwischen dem Sollwert des Ankerstromes und
der Drehzahl.
Die induzierte Gegenspannung wirkt sich durch die Stromregelung in den fur die Drehzahlregelung
relevanten Frequenzbereichen kaum auf den Ankerkreis aus. Dadurch kann die Ruckkopplung des
mechanischen Teils auf den Ankerkreis des Motors vernachlassigt werden und wir konnen zwei separate
Streckenteile betrachten.
2. Als Regler soll ein PI-Glied verwendet werden:
Kω(s) = kωs− s0,ω
s, kω, s0,ω ∈ R.
Begrunden Sie, warum diese Reglerstruktur sinnvoll ist. Fuhren Sie einen Entwurf nach dem Frequenz-
kennlinienverfahren durch. Zeichnen Sie dafur zunachst das Bode-Diagramm von Gω. Bestimmen Sie
Verstarkung und Lage der Nullstelle so, dass der geschlossene Regelkreis eine Ausregelzeit1 von etwa
0.6 Sekunden aufweist und das Uberschwingen einen Wert von 20% nicht ubersteigt. Hinweis: Der
Regelkreis sollte eine Phasenreserve von etwa 65 aufweisen.
3. Berechnen Sie die Fuhrungsubertragungsfunktion Tω des Drehzahlregelkreises. Simulieren Sie die
Fuhrungssprungantwort.
1Unter Ausregelzeit wird die Zeit zwischen dem Auftreten eines Sollwertsprunges und dem Eintritt der Regelgroße in ein
Intervall von±2% Abweichung um den Sollwert, so dass die Regelgroße nach Eintritt in diesem Intervall verbleibt, verstanden.
7

4. Berechnen Sie die Storubertragungsfunktion fur Anderungen des Lastmoments mL. Simulieren Sie die
Storsprungantwort.
5. Erweitern Sie ihre bestehende Reglerstruktur in Scicos um eine Anti-Windup-Schaltung, indem Sie
die Differenz zwischen beschrankter und geforderter Stellgroße uber eine Konstante γ auf die Integra-
toreingange ruckkoppeln. Realisieren Sie dafur die beiden PI-Regler in einer Parallelform mit P- und
I-Anteil.
6 Versuchsdurchfuhrung
1. Implementieren Sie ihre Kaskadenregelung mit den zwei Reglern und der Anti-Windup-Schaltung in
Scicos und erstellen Sie mit dem Betreuer das echtzeitfahige Programm zur Motoransteuerung.
2. Nehmen Sie die Fuhrungssprungantwort des Drehzahlregelkreises auf. Schalten Sie dafur den Sollwert
der Drehzahl von 0 rads auf 150 rad
s . Nehmen Sie zusatzlich zu der Regelgroße auch die Stellgroße des
Regelkreises auf.
3. Nehmen Sie die Storsprungantwort des Systems auf. Betreiben Sie den Motor bei einer Drehzahl von
150 rads und losen sie die Schranke der Bremse um ein Sprunghaftes Lastmoment zu erhalten. Nehmen
Sie zusatzlich zu der Regelgroße auch die Stellgroße des Regelkreises auf.
4. Testen Sie ihre Anti-Windup-Schaltung, indem Sie die Scheibe sehr kurz festhalten und sofort wieder
losen. Wie sieht der Windup-Effekt ohne Schaltung aus? Nehmen Sie neben der Drehzahl und dem
Ankerstrom die Stellgroßen vor und nach der Beschrankung auf.
Anhang
Nutzliche Scilab-Befehle
• Scilab-Hilfe zum Befehl X
help X
• Definition eines Polynoms uber die Nullstellen (in Abwandlung uber Koeffizienten)
poly
Beispiel
s=poly(0,’s’);
• Definition eines linearen Systems aus den Matrizen des Zustandsraummodells (A,B,C) oder einer
Transferfunktion
syslin
Beispiel
G=syslin(’c’,A,B,C);
G=syslin(’c’,1/(1+s));
8
• Zustandsraummodell in Transferfunktion umwandeln oder umgekehrt
ss2tf, tf2ss
• Komplexen Frequenzgang eines Systems bestimmen
repfreq
Beispiel (andere Aufrufmethoden siehe Scilab-Hilfe)
repf=repfreq(system,frequenzvektor)
• Amplitude in dB und Phase in aus dem komplexen Frequenzgang bestimmen
dbphi
Beispiel
[db,phi]=dbphi(repf)
Soll die Amplitude linear vorliegen, verwendet man
abs
• Simulation einer Sprungantwort
csim
Beispiel
t=0:0.01:10; //Zeitvektor
u=ones(t); //Vektor gleicher Elementzahl wie t, Elemente alle 1
y=csim(u,t,sys); //sys lineares System
//auch: y=csim(’step’,t,sys);
• Phasenreserve errechnen: Scilab-Funktion liefert nur die Phase bei der Durchtrittsfrequenz
p_margin
Um die Phasenreserve zu erhalten muss man die Differenz zu ±180 bilden.
• Ein Ergebnis von kleinen Koeffizienten “saubern” (Entstehung durch numerische Berechnung)
clean
Hinweis: Schreiben Sie ihre eigenen Plotroutinen. Diese konnen als Scilab-Funktionen gespeichert und so
immer wieder von ihnen verwendet werden. Weitere, tiefergehende Beispiele und Hinweise finden sich in der
Scilab-Einfuhrung2 des Instituts, welche auf der Webseite verfugbar ist.
2http://www.control.tu-berlin.de/Teaching:Scilab
9