Hochschule Bochum – Fachbereich Geodäsie 1
Bauvermessung
Grundvorlesung im BA-Studiengang
Bauingenieurwesen Prof. Dr.-Ing. H.-J. Przybilla
Quellen: Resnik/Bill: Vermessungskunde für den Planungs-, Bau- und Umweltbereich Witte/Schmidt: Vermessungskunde und Grundlagen der Statistik für das Bauwesen
Hochschule Bochum – Fachbereich Geodäsie 2
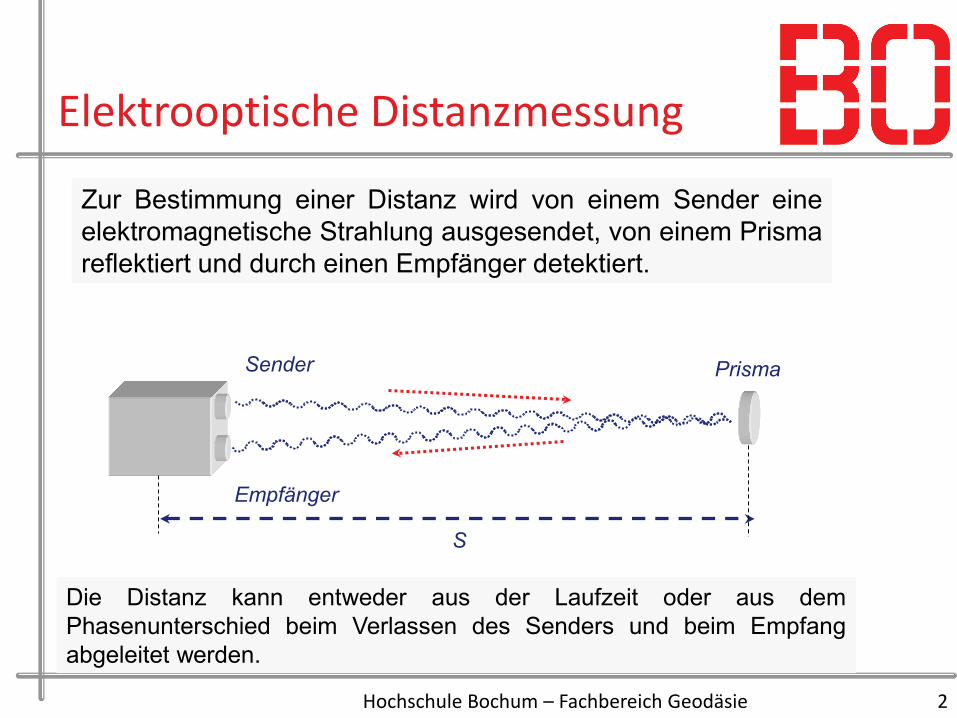
Elektrooptische Distanzmessung
Prisma
S
Sender
Empfänger
Zur Bestimmung einer Distanz wird von einem Sender eine elektromagnetische Strahlung ausgesendet, von einem Prisma reflektiert und durch einen Empfänger detektiert.
Die Distanz kann entweder aus der Laufzeit oder aus dem Phasenunterschied beim Verlassen des Senders und beim Empfang abgeleitet werden.
Hochschule Bochum – Fachbereich Geodäsie 3
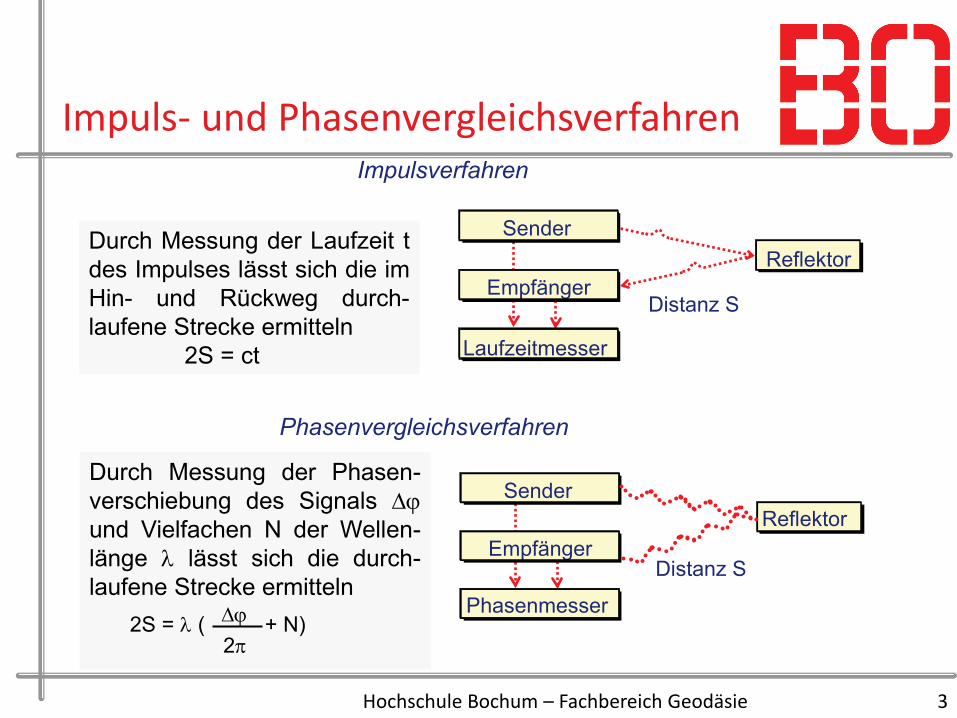
Impuls- und Phasenvergleichsverfahren Impulsverfahren
Sender Reflektor
Empfänger
Laufzeitmesser
Distanz S
Durch Messung der Laufzeit t des Impulses lässt sich die im Hin- und Rückweg durch-laufene Strecke ermitteln 2S = ct
Phasenvergleichsverfahren
Sender Reflektor
Empfänger
Phasenmesser
Distanz S
Durch Messung der Phasen-verschiebung des Signals ∆ϕ und Vielfachen N der Wellen-länge λ lässt sich die durch-laufene Strecke ermitteln
2S = λ ( + N) ∆ϕ 2π
Hochschule Bochum – Fachbereich Geodäsie 4
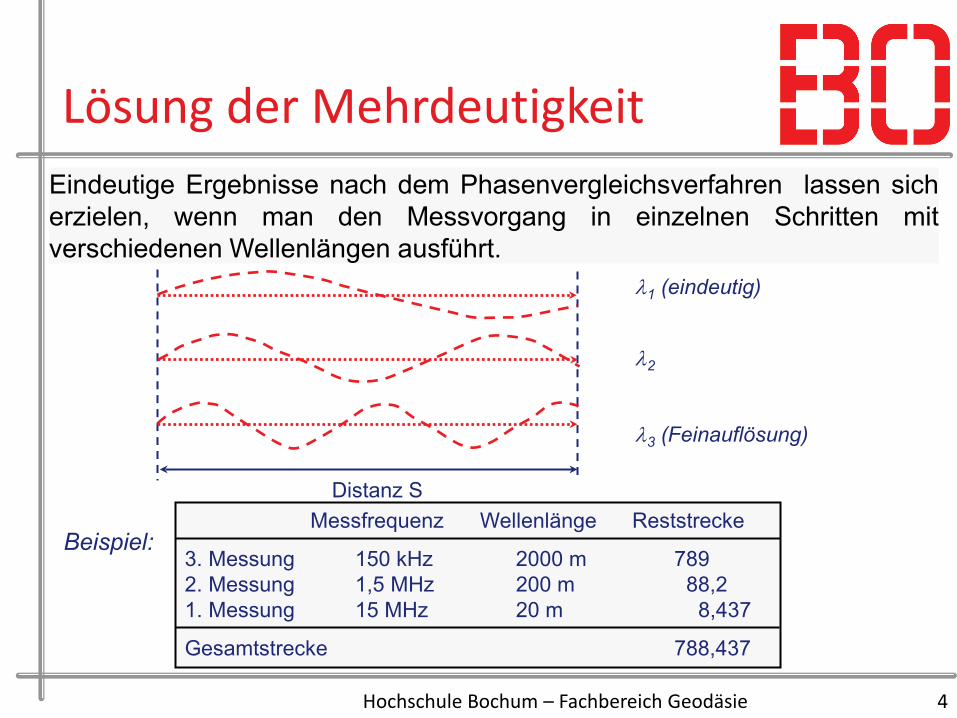
Lösung der Mehrdeutigkeit
λ1 (eindeutig)
λ2
λ3 (Feinauflösung)
Eindeutige Ergebnisse nach dem Phasenvergleichsverfahren lassen sich erzielen, wenn man den Messvorgang in einzelnen Schritten mit verschiedenen Wellenlängen ausführt.
Messfrequenz Wellenlänge Reststrecke
3. Messung 150 kHz 2000 m 789 2. Messung 1,5 MHz 200 m 88,2 1. Messung 15 MHz 20 m 8,437
Gesamtstrecke 788,437
Beispiel:
Distanz S
Hochschule Bochum – Fachbereich Geodäsie 5
Anwendung des Impulsverfahrens
Empfänger
Sender
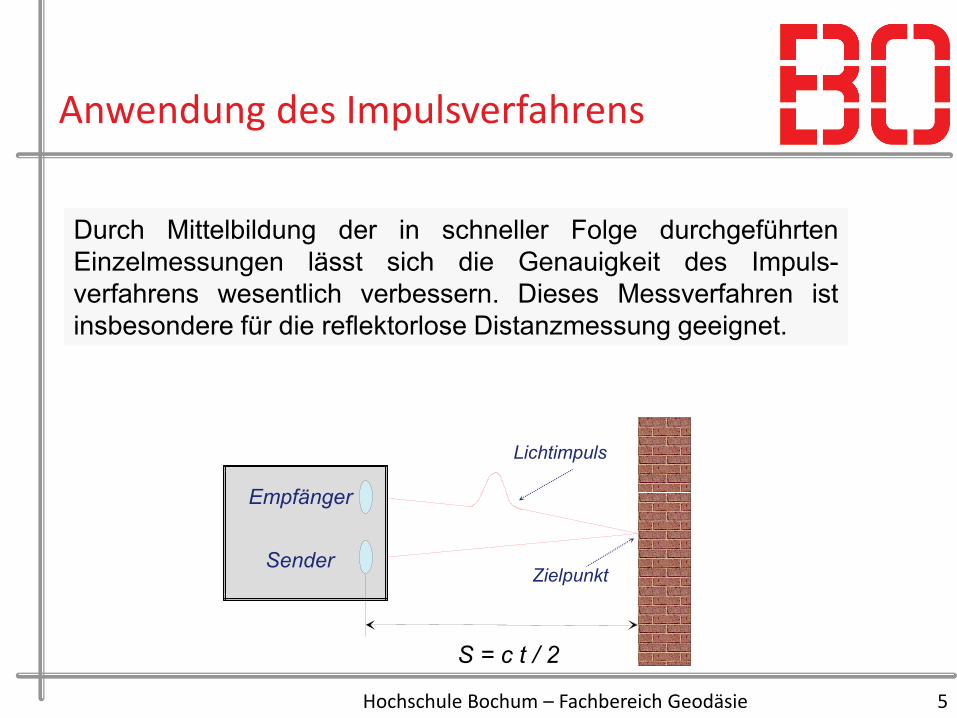
S = c t / 2
Durch Mittelbildung der in schneller Folge durchgeführten Einzelmessungen lässt sich die Genauigkeit des Impuls-verfahrens wesentlich verbessern. Dieses Messverfahren ist insbesondere für die reflektorlose Distanzmessung geeignet.
Lichtimpuls
Zielpunkt
Hochschule Bochum – Fachbereich Geodäsie 6
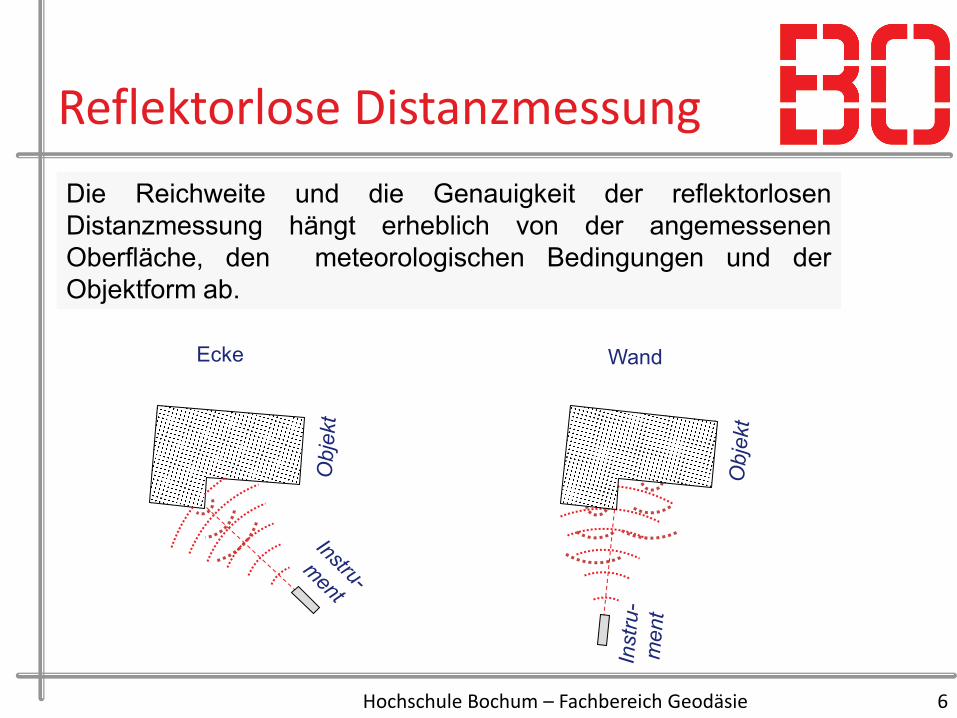
Reflektorlose Distanzmessung Die Reichweite und die Genauigkeit der reflektorlosen Distanzmessung hängt erheblich von der angemessenen Oberfläche, den meteorologischen Bedingungen und der Objektform ab.
Ecke Wand
Hochschule Bochum – Fachbereich Geodäsie 7
Reflektorlose Distanzmessung 1994 stellte Leica mit DISTO den ersten elektronischen Handstreckenmesser vor. Das Messsystem ist aufgrund der reflektorlosen Streckenmesstechnik weit mehr als ein Ersatz für das Messband.
Hochschule Bochum – Fachbereich Geodäsie 8
Reflektorlose Distanzmessung
Die wesentlichen Vorteile gegenüber dem Messband sind:
1-Personen-Messystem, präzisere Messungen (s = 1 bis 10 mm auf 50 m), gefahrlose Messung von Raumhöhen bzw. schwer zugänglichen
Abschnitten (Verkehrs- und Wasserflächen usw.), automatische Speicherung der Messwerte und Berechnung von
Flächen und Volumina, umfangreiches Zubehör (Visiereinrichtungen, Zieltafeln usw.) für
spezielle Messaufgaben, wie Baumhöhen und große Entfernungen.

Hochschule Bochum – Fachbereich Geodäsie 9
Elektronische Tachymeter
+ Optisch-mechanische Theodolite
Optisch-mechanische Entfernungsmesser
+ Optisch-mechanische Theodolite
Elektronische Entfernungsmesser
+ Elektronische Theodolite
Elektronische Entfernungsmesser
Während optisch-mechani-sche Tachymeter eher an der Kartiergenauigkeit im dm-Bereich orientiert sind, lassen sich die Zielpunkte durch Kombination der elektronischen Winkel- und Distanzmesseinrichtungen mit cm- und sogar mm-Genauigkeit einmessen. Elektronisches
Tachymeter (Totalstation)
N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch

Hochschule Bochum – Fachbereich Geodäsie 10
S
Z
β
Scanner- spiegel
Motor
Sende- und Empfangsoptik
Während die elektronischen Tachymeter in der Regel eine selektive Erfassung der ausgewählten Objektpunkte ermöglichen, werden die zu erfassenden Objekte bei Anwendung der sog. Laserscanner abgetastet, d. h. mit einem regelmäßigen Raster von Messpunkten überzogen.
Terrestrische Laserscanner
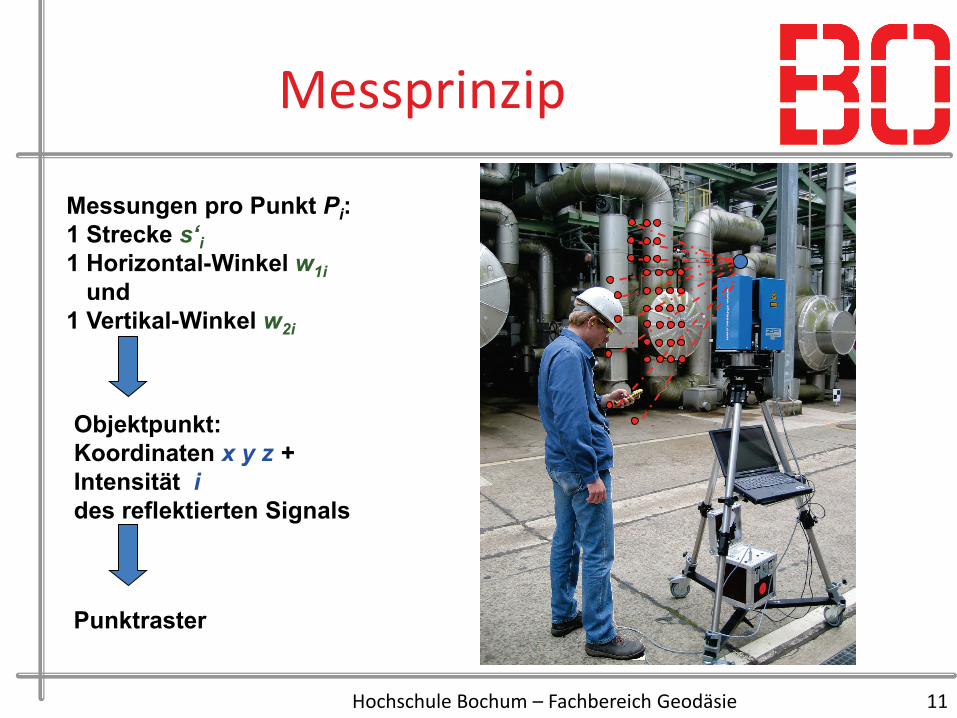
Hochschule Bochum – Fachbereich Geodäsie 11
Messungen pro Punkt Pi: 1 Strecke s‘i 1 Horizontal-Winkel w1i und 1 Vertikal-Winkel w2i
Objektpunkt: Koordinaten x y z + Intensität i des reflektierten Signals
Punktraster
Messprinzip

Hochschule Bochum – Fachbereich Geodäsie 12
Punktwolke (Maschinenhalle Zeche Zollern)

Hochschule Bochum – Fachbereich Geodäsie 13
Punktwolke im Vergleich zu Bilddaten
Hochschule Bochum – Fachbereich Geodäsie 14
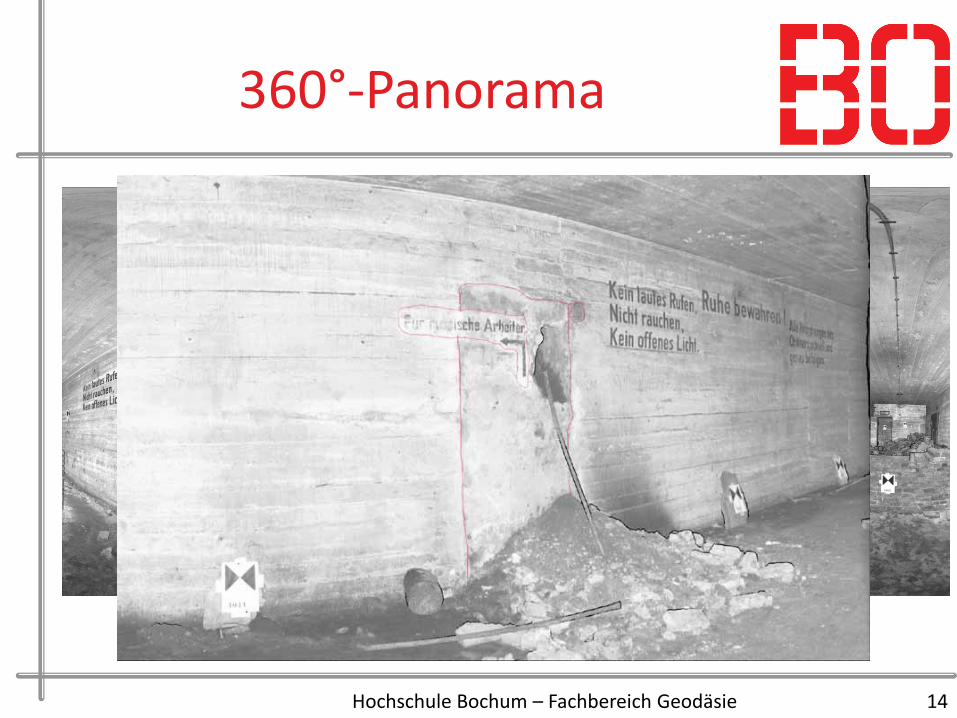
360°-Panorama

Hochschule Bochum – Fachbereich Geodäsie 15
Tachymetrie ist die Messmethode, mit der sich eine Geländeaufnahme nach Grundriss und Höhe durch die Messung von Richtungen, Strecken und Höhenunterschieden vom Instrumentenstandpunkt aus schnell durchführen lässt.
A
B
1
SA1
β1
tAB tA1
A
B
1
Draufsicht
Z1
i
t SA1
A 1
HA H1
Vertikalschnitt
X1 = XA + SA1 cos(tAB+β1)
Y1 = YA + SA1 sin(tAB+β1)
H1 = HA + SA1 cot(Z1) + i - t
Tachymetrie
Hochschule Bochum – Fachbereich Geodäsie 16
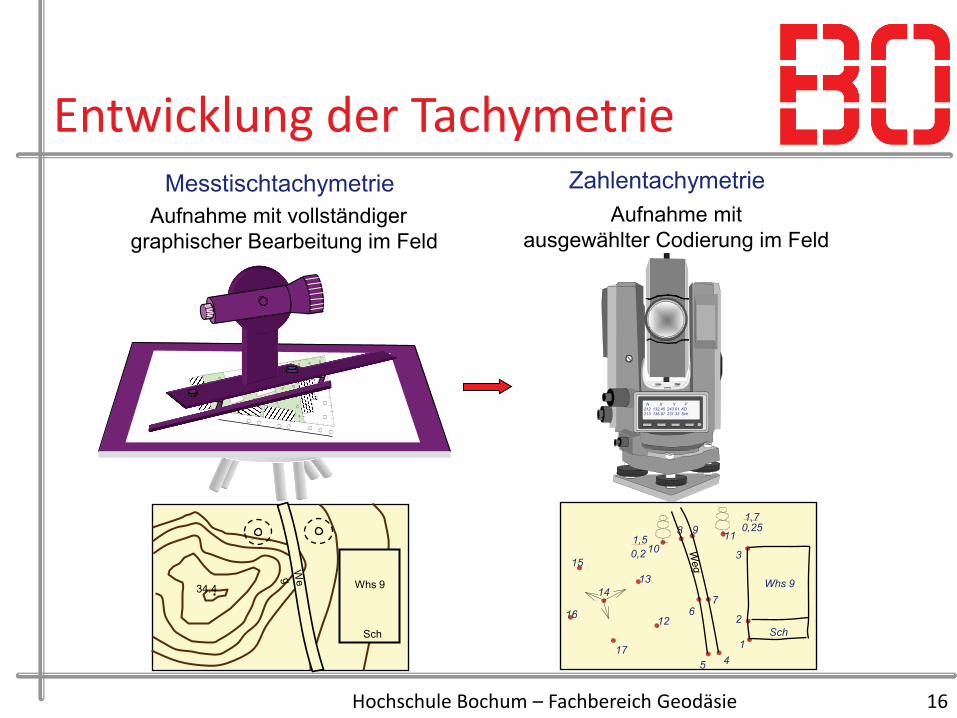
Messtischtachymetrie Aufnahme mit vollständiger
graphischer Bearbeitung im Feld
Zahlentachymetrie Aufnahme mit
ausgewählter Codierung im Feld
Whs 9
Sch 1
2
3
4 5
6 7
10
8 9 11
17
12
13 15
16
14
1,5 0,2
1,7 0,25
Whs 9
Sch
34.4
N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch
Entwicklung der Tachymetrie

Hochschule Bochum – Fachbereich Geodäsie 17
Grundprinzip der tachymetrischen Aufnahme
Standpunkte
Aufnahmepunkte Standpunkt
Als Grundlage für die tachymetrische Aufnahme wird ein Festpunktrahmen benötigt, in dem jeder Standpunkt nach Lage und Höhe bestimmt wird. Abstand und Lage dieser Punkte richtet sich nach den Sichtverhältnissen im Gelände.
Aufnahmepunkte
Hochschule Bochum – Fachbereich Geodäsie 18
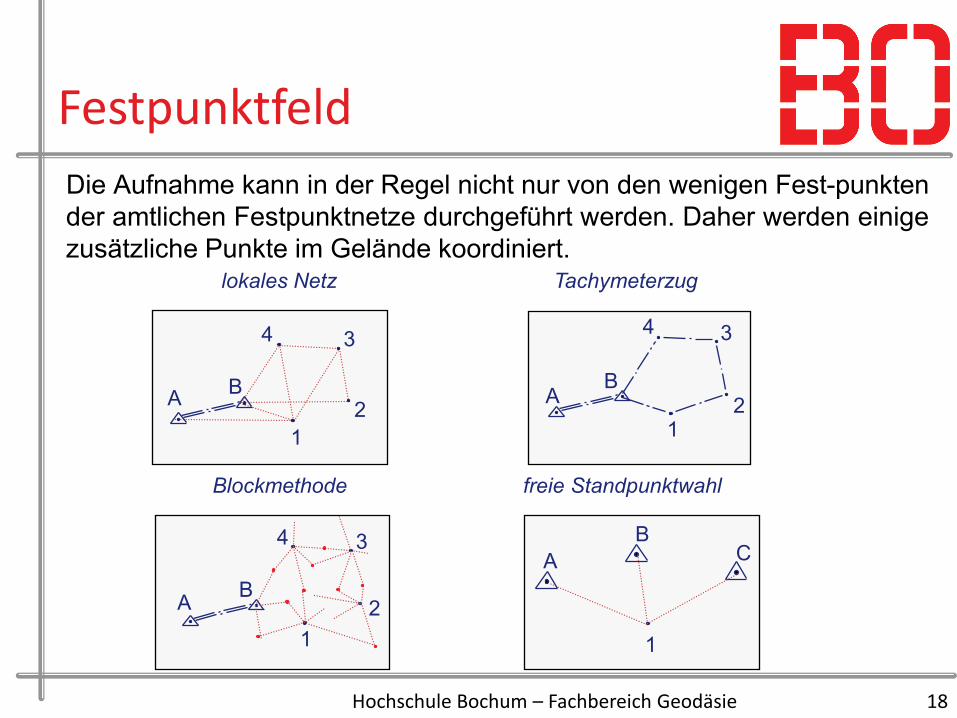
Festpunktfeld
Tachymeterzug
1 2
3 4
A B
Blockmethode
A B
freie Standpunktwahl
A C B
1
lokales Netz
A B
1 2
3 4
Die Aufnahme kann in der Regel nicht nur von den wenigen Fest-punkten der amtlichen Festpunktnetze durchgeführt werden. Daher werden einige zusätzliche Punkte im Gelände koordiniert.
4
2 1
3
Hochschule Bochum – Fachbereich Geodäsie 19
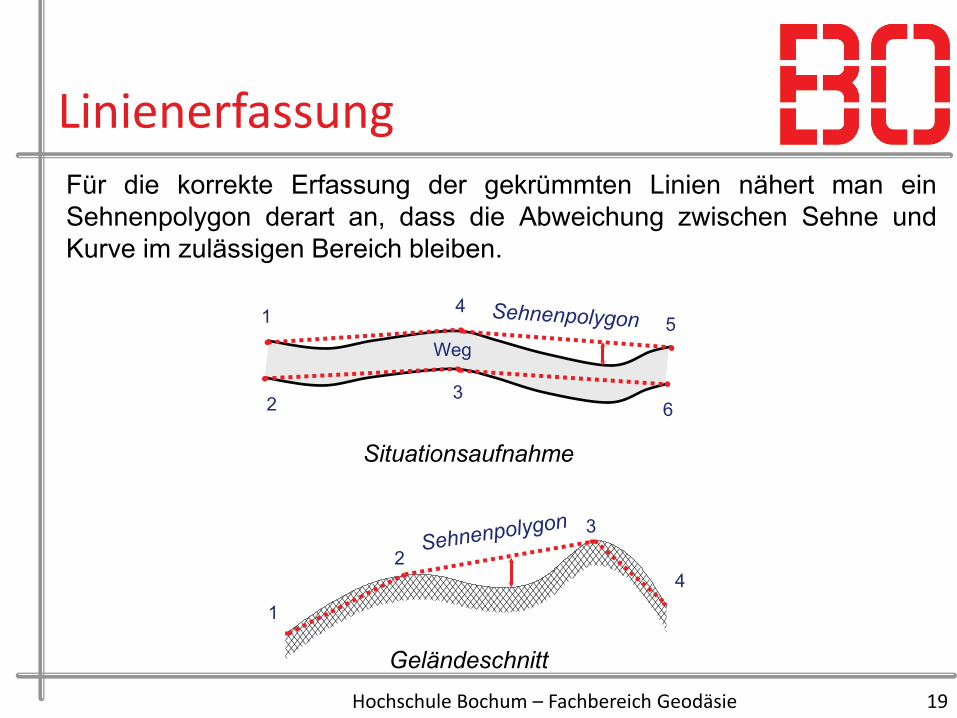
Linienerfassung
1
2
3
4
Geländeschnitt
1
2 3
4 5
6
Weg
Situationsaufnahme
Für die korrekte Erfassung der gekrümmten Linien nähert man ein Sehnenpolygon derart an, dass die Abweichung zwischen Sehne und Kurve im zulässigen Bereich bleiben.
Hochschule Bochum – Fachbereich Geodäsie 20
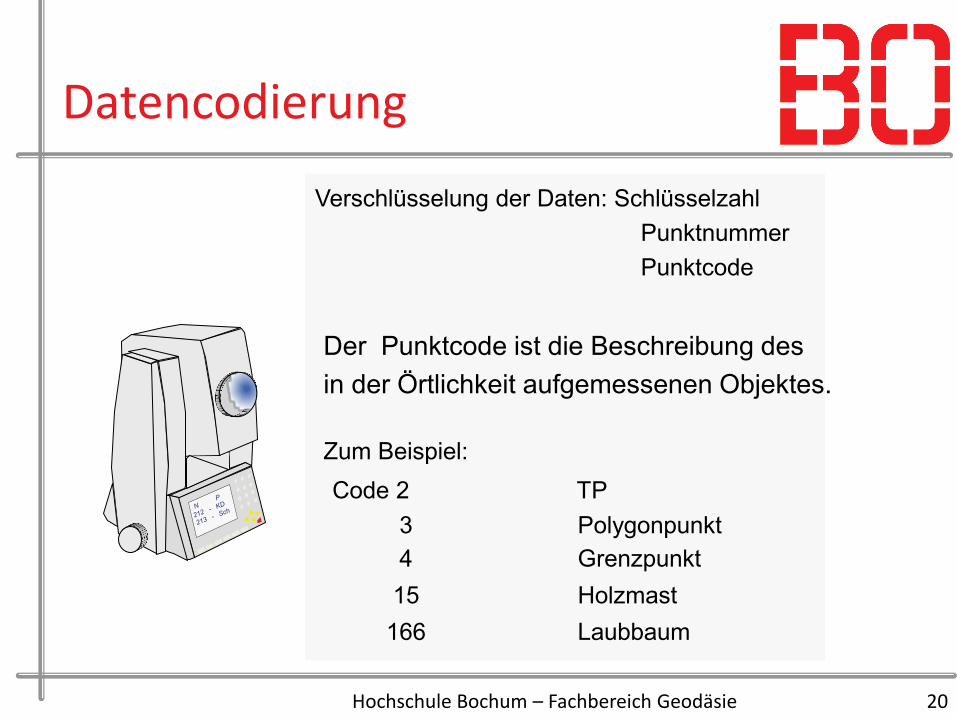
Datencodierung
Verschlüsselung der Daten: Schlüsselzahl Punktnummer Punktcode
Der Punktcode ist die Beschreibung des in der Örtlichkeit aufgemessenen Objektes. Zum Beispiel: Code 2 TP
3 Polygonpunkt 4 Grenzpunkt 15 Holzmast 166 Laubbaum

Hochschule Bochum – Fachbereich Geodäsie 21
020 Gehweg 021 Gehw.-Einf. 022 Gehw.-Mauer 023 Gehw.-Zaun 024 Mauer-Zaun 025 Mauerecke 026 Mauer-Haus 027 Zaunecke 028 Geländer 029 Trockenm. 030 Gittermast 031 Holzmast 032 A-mast 033 Doppelmast 034 Kabelsch. 035 Schaltkast. 036 Laterne 037 Betonmast 038 Kabelstein 039 Trafo
040 KD 041 Hydrant 042 Wassersch. 043 Gully 044 Doppelgully 045 Rinne Anf. 046 Rinne Mitte 047 Durchlass 048 ACO-Drain 049 Parkuhr 050 OK Graben 051 UK Graben 052 Grabenmitte 053 OK Bach 054 UK Bach 055 OK Sohlsch. 056 UK Sohlsch. 057 Kabelsch. 058 Notruf 059 Infotafel
060 Gasschieber 061 Ferngassch. 062 Riechrohr 063 Lichtsch. 064 Stufe, Trep. 065 Beet 066 FS 067 Eingang 068 Schacht 069 Pfeiler 070 OK Bö. 071 UK Bö. 072 Bö.-Spitze 073 Bö.-Knick 074 OK Zaun 075 UK Zaun 076 OK Weg 077 UK Weg 078 Gelände 079 OK=UK
000 001 TP 002 PP 003 Grenzpkt. 004 Achspkt. 005 Geb.Ecke 006 Fl.-Ende 007 Überdach. 008 Hl.-Ecke 009 Fahrb.-Mitte 010 Fahrb.-Rand 011 Bogenanf. 012 Bogen 013 Schw.Decke 014 Wegrand 015 Parktasche 016 Busbucht 017 Insel 018 Radweg 019 S. Skizze
Die Überlegungen hinsichtlich des Aufbaues einer sinnvollen Datenstruktur müssen vor Beginn der Vermessung abgeschlossen sein.
Codelisten

Hochschule Bochum – Fachbereich Geodäsie 22
Führung des Feldrisses
Inhalte:
- Instrumentenstandpunkte, Nr., Anschlussrichtung
- Geländepunkte - Interpolationslinien
- Zäune, Grenzen, Straßen etc. - auffallende Einzelobjekte - Nutzungsarten
- Böschungen, Kuppen, Mulden - Gebäude (Nutzung, Hausnr.)
- Nordpfeil
- Kennzeichnung (Datum, Name)
Feldriss Seite
Gemessen am : durch :
Land Gemeinde Kreis Stadt
Gemarkung Ortsteil
Kennziffer/Block Straße, Flur Kartenblatt Nr. Maßstab Objekt Auftrags-Nr.Maßstab
Whs 9
Sch 1
2
3
4 5
6 7
10 8 9 11
17
12
13 15
16 14
1,5 0,2
1,7 0,25
12.11.04
Paul
Rostock
Pr. Umbau
N
PP 5
PP 4
PP 6
Wiese
1
Da nicht alle möglichen Attribute und Verbindungsinformationen durch die Punktcodes verschlüsselt werden können, werden bei den umfangreichen tachymetrischen Aufnahmen zusätzlich Feldskizzen geführt.

Hochschule Bochum – Fachbereich Geodäsie 23
N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch
Projekt: Rostock - [Digitale Karte]
Whs. 9
Sch
34.4
Vollständige Codierung und graphische Bearbeitung
N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch
Ausgewählte Codierung
Mit modernen Feldcomputern ergibt sich heutzutage die Möglichkeit, die graphischen Bearbeitungsmöglichkeiten des "klassischen" Messtisches mit den Forderungen eines geschlossenen Datenflusses zu verbinden.
Grafische Aufnahmeverfahren

Hochschule Bochum – Fachbereich Geodäsie 24
Elektronische Datenverarbeitung (EDV)
Messung und Datenregistrierung
Aufbereitung der Rohdaten und Datenkorrektur
Koordinatenberechnungen aus den Messdaten
Ein ununterbrochener digitaler und möglichst verlustfreier Datenfluss ist die Voraussetzung für eine effektive und wirtschaftliche Anwendung der EDV im Vermessungswesen.
Hochschule Bochum – Fachbereich Geodäsie 25
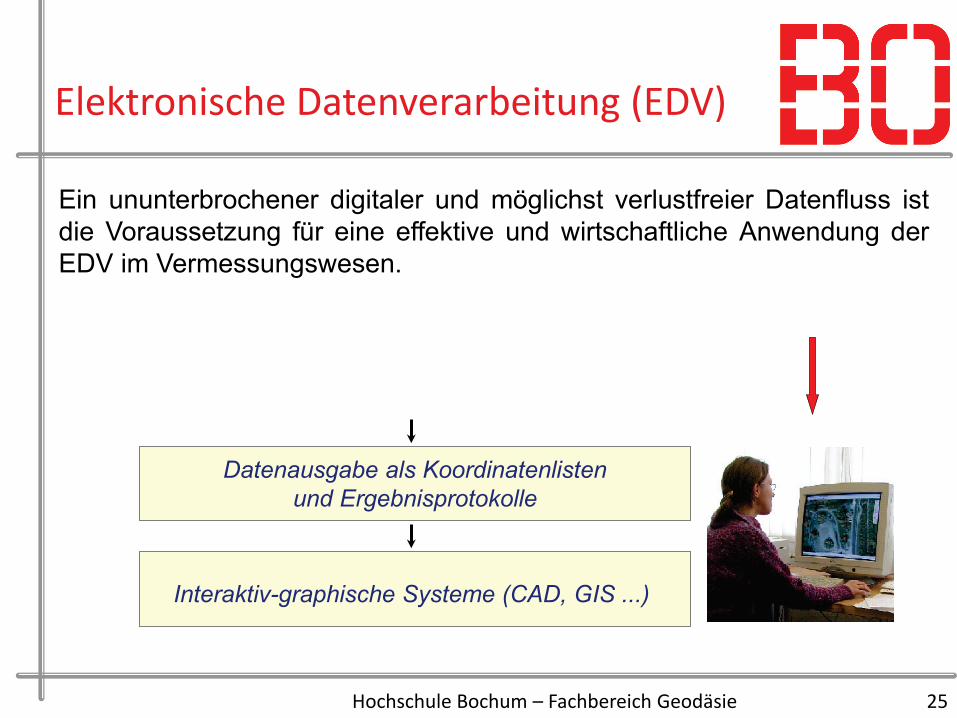
Datenausgabe als Koordinatenlisten und Ergebnisprotokolle
Interaktiv-graphische Systeme (CAD, GIS ...)
Elektronische Datenverarbeitung (EDV)
Ein ununterbrochener digitaler und möglichst verlustfreier Datenfluss ist die Voraussetzung für eine effektive und wirtschaftliche Anwendung der EDV im Vermessungswesen.
Hochschule Bochum – Fachbereich Geodäsie 26
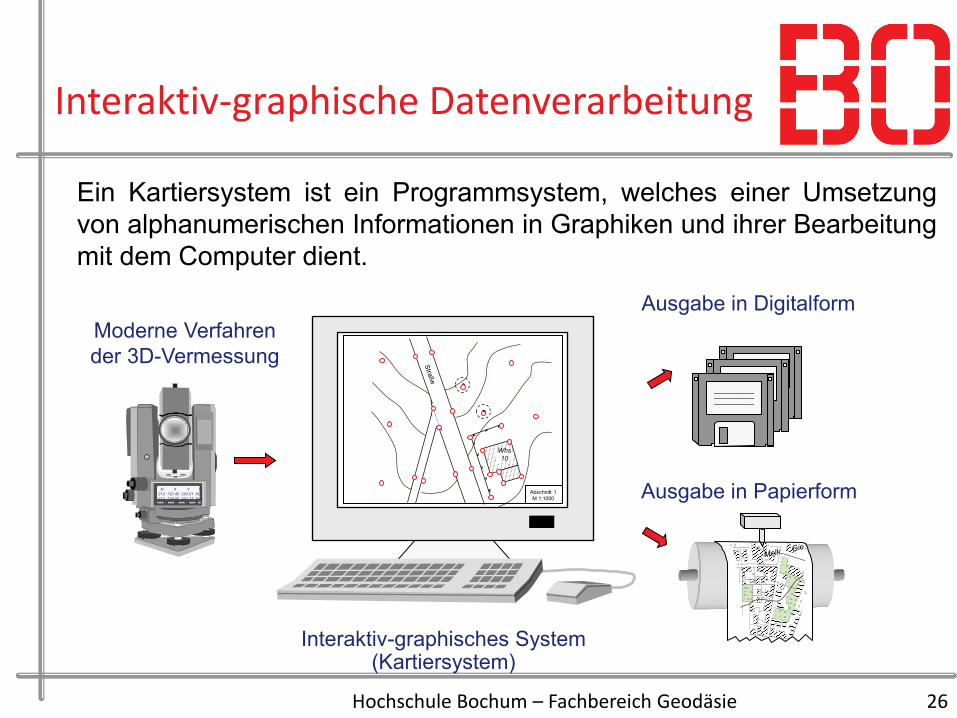
Interaktiv-graphische Datenverarbeitung
Ausgabe in Digitalform
Whs 10
Ausgabe in Papierform N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch
Moderne Verfahren der 3D-Vermessung
Abschnitt 1 M 1:1000
Ein Kartiersystem ist ein Programmsystem, welches einer Umsetzung von alphanumerischen Informationen in Graphiken und ihrer Bearbeitung mit dem Computer dient.
Interaktiv-graphisches System (Kartiersystem)
Hochschule Bochum – Fachbereich Geodäsie 27
Datenverarbeitung in einem CAD-System
CAD ist ein Sammelbegriff für ein Programmsystem zur digitalen Bearbeitung geometrischer Gebilde, welches speziell zum Konstruieren und Visualisieren verwendet wird.
CAD-System
N X Y P 212 132.45 243.01 KD 213 138.97 231.33 Sch
Moderne Verfahren der 3D-Vermessung
Ausgabe in Digitalform
Ausgabe in Papierform
Hochschule Bochum – Fachbereich Geodäsie 28
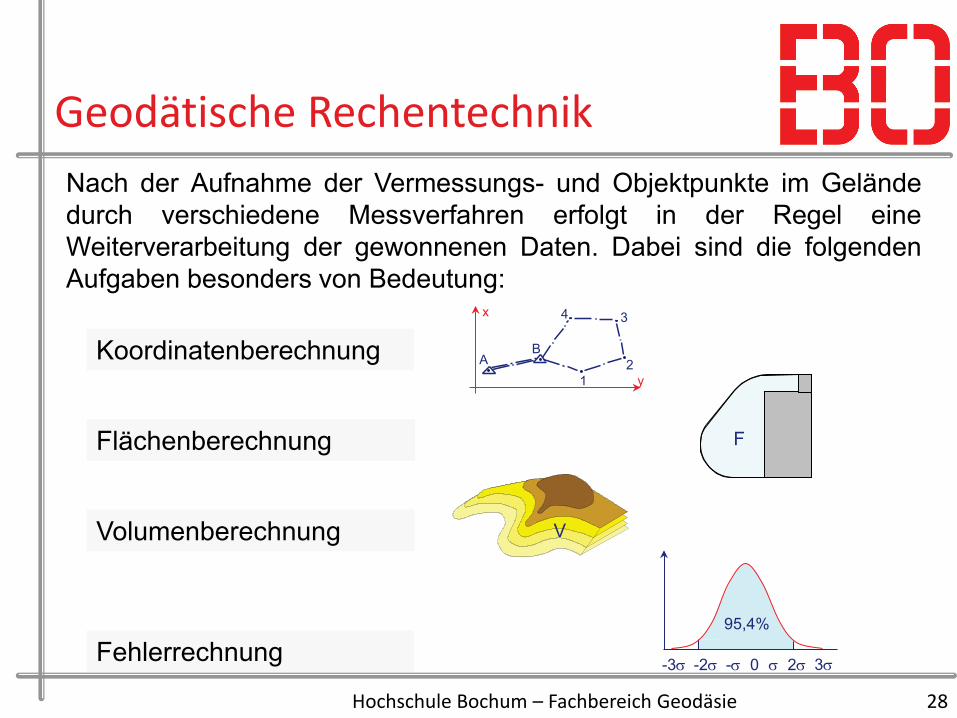
Geodätische Rechentechnik Nach der Aufnahme der Vermessungs- und Objektpunkte im Gelände durch verschiedene Messverfahren erfolgt in der Regel eine Weiterverarbeitung der gewonnenen Daten. Dabei sind die folgenden Aufgaben besonders von Bedeutung:
Flächenberechnung F
Volumenberechnung V
Koordinatenberechnung 1
2 A B
3 4 x
y
Fehlerrechnung 95,4%
-3σ -2σ -σ 0 σ 2σ 3σ
Hochschule Bochum – Fachbereich Geodäsie 31
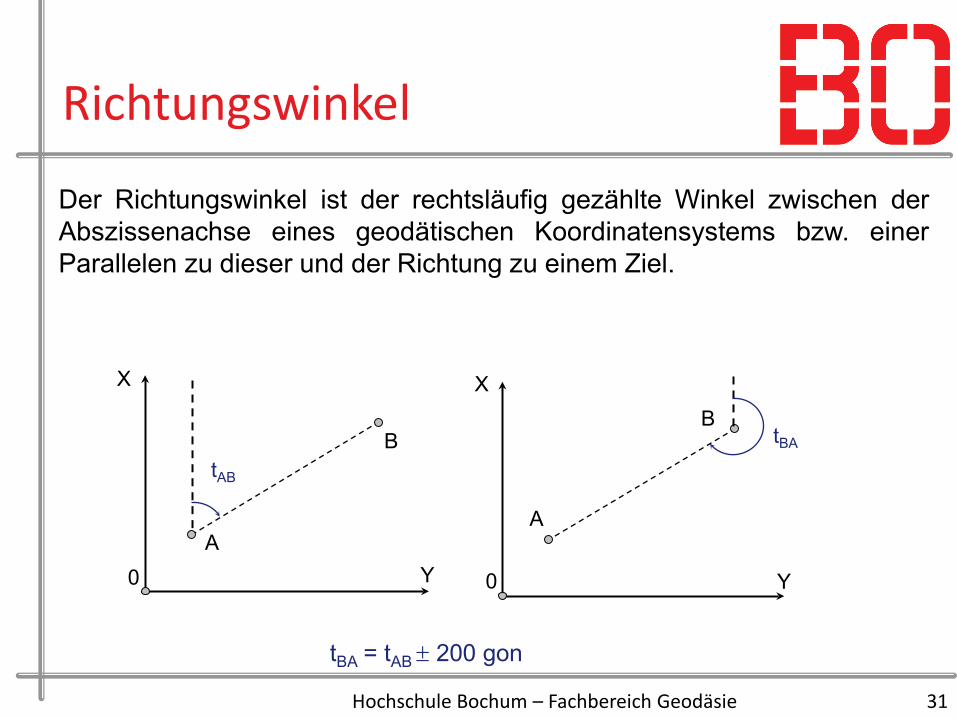
Richtungswinkel
Der Richtungswinkel ist der rechtsläufig gezählte Winkel zwischen der Abszissenachse eines geodätischen Koordinatensystems bzw. einer Parallelen zu dieser und der Richtung zu einem Ziel.
X
Y
A
0
B tBA
X
Y A
0
B tAB
tBA = tAB ± 200 gon
Hochschule Bochum – Fachbereich Geodäsie 32
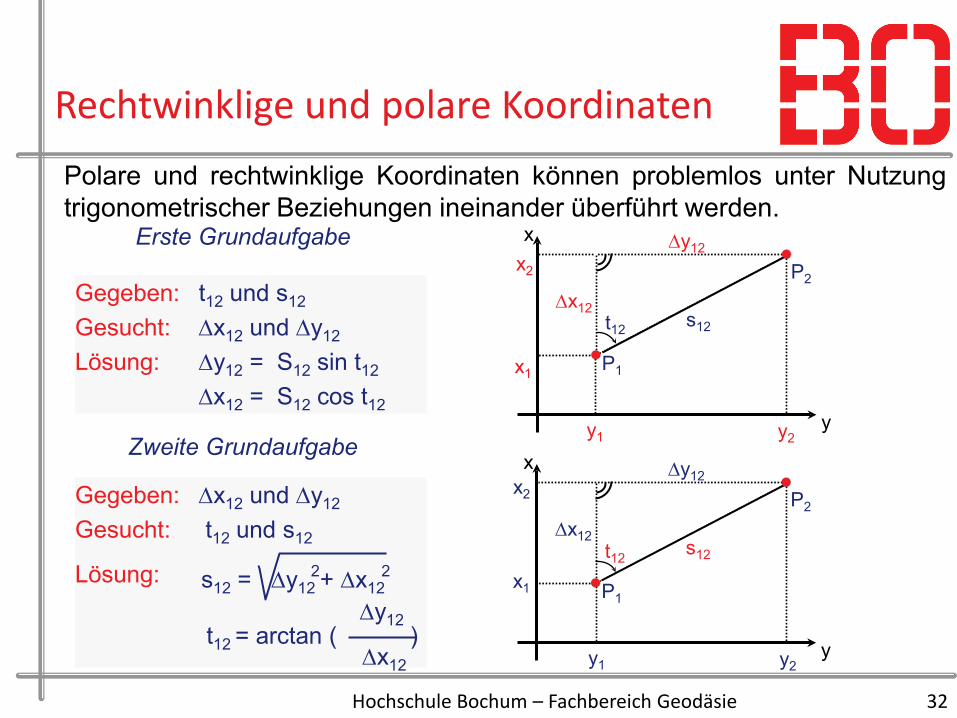
Rechtwinklige und polare Koordinaten
Gegeben: t12 und s12 Gesucht: ∆x12 und ∆y12
Lösung: ∆y12 = S12 sin t12
∆x12 = S12 cos t12
Erste Grundaufgabe
Polare und rechtwinklige Koordinaten können problemlos unter Nutzung trigonometrischer Beziehungen ineinander überführt werden.
Zweite Grundaufgabe
Gegeben: ∆x12 und ∆y12 Gesucht: t12 und s12
Lösung:
t12 = arctan ( ) ∆y12
∆x12
s12 = ∆y12 + ∆x12 2 2
x1
x2
y1 y2
t12 ∆x12
∆y12
s12
y
x
P1
P2
∆x12
∆y12
x1
x2
y1 y2
t12 s12
P1
P2
y
x
Hochschule Bochum – Fachbereich Geodäsie 36
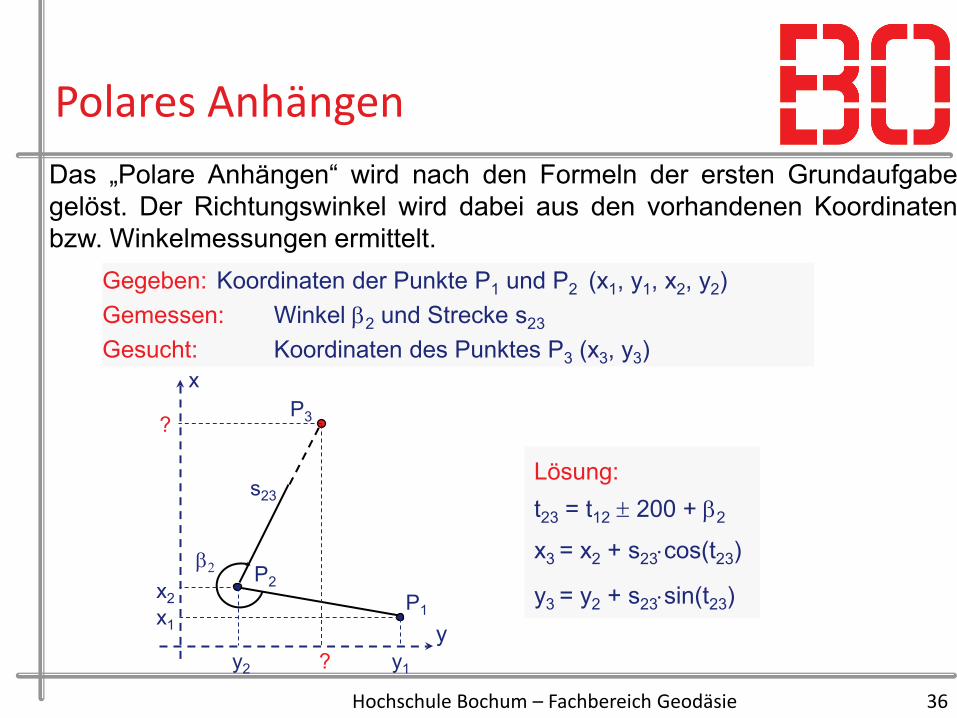
Polares Anhängen
Gegeben: Koordinaten der Punkte P1 und P2 (x1, y1, x2, y2) Gemessen: Winkel β2 und Strecke s23 Gesucht: Koordinaten des Punktes P3 (x3, y3)
P1 y
x
P2
Lösung: t23 = t12 ± 200 + β2
x3 = x2 + s23⋅cos(t23)
y3 = y2 + s23⋅sin(t23)
Das „Polare Anhängen“ wird nach den Formeln der ersten Grundaufgabe gelöst. Der Richtungswinkel wird dabei aus den vorhandenen Koordinaten bzw. Winkelmessungen ermittelt.
s23
β2
P3
y1
x1
y2
x2
?
?

Hochschule Bochum – Fachbereich Geodäsie 37
Lösung:
Polares Anhängen - Zahlenbeispiel
350 gon
?
?
30 m
40 m
90 m
60 m P1
P2
y
x
60 m
P3
y3 = y2 + s23 ⋅ sin(t23) = 56,833 m
t12 = 200 + arctan ( ) = 200 + 79,517 = 279,517 gon ∆y12
∆x12
Gegeben: x1, y1, x2, y2 Gemessen: β2 = 350 gon s23 = 60 m Gesucht: x3, y3
t23 = t12 ± 200 + β2 = 29,517 gon x3 = x2 + s23 ⋅ cos(t23) = 93,67 m
(klicken um Lösungsschritte anzuzeigen)

Hochschule Bochum – Fachbereich Geodäsie 38
Instrumente für die Polaraufnahme
Trimble 3300DR

Hochschule Bochum – Fachbereich Geodäsie 39
Instrumente für die Polaraufnahme
Zeiss Elta 50Ra

Hochschule Bochum – Fachbereich Geodäsie 40
Instrumente für die Polaraufnahme
Leica TC 600a







